I
Изобретение относится к сельскому хозяйству, в частности к обработке или уборке пропашных культур.
Известны устройства для обнаружения растений на почве, на основе которых строятся автоматы вождения машины вдоль рядков растений 1.
Но известные устройства вождения вдоль рядков растений функционируют только при нахождении машины на рядах, а для разворота в конце поля и вхождения на следующие ряды требуется вмешательство водителя, т. е. необходимо присутствие водителя при обработке всего поля.
Известно также устройство для автоматического направления движения самоходных агрегатов, включаюш,ее генератор переменного тока, токонесуш,ие провода, чувствительный элемент эквидестантной траектории движения, программный блок и элементы сервоприводов исполнительных механизмов .2.
Однако известное устройство не обладает возможностью автоматического разворота в конце гона, т. е. отсутствует одна из основных функций автомата, как автономного, устройства. Кроме того, наличие токонесуших проводов, которые требуется закладывать в грунт перед началом работы на поле, приводит к значительным неудобствам в работе.
, Целью данного изобретения является обеспечение возможности автоматического разворота агрегата в конце гона, т. е. полная автоматизация вождения при обработке или уборке поля.
Указанная цель достигается тем, что программный блок снабжен схемой разворота, содержащей задающий генератор, срединенный через схему совпадения со счетчиком, к другому входу которого подключен один выход схемы сброса, второй выход которой соединен со схемой совпадения, а входы непосредственно и через инвертор связаны с выходом чувствительного элемента, при этом выход счетчика соединен с двумя каналами управления сервоприводом, на вход которых включен триггер поворота, связанный с устройством начальной установки первого поворота и схемой сброса, при этом каналы управления выполнены из двух последовательно включенных схем совпадения, элементов ИЛИ и выходных триггеров.
причем входы схем совпадения соединены с выходом триггера поворота.
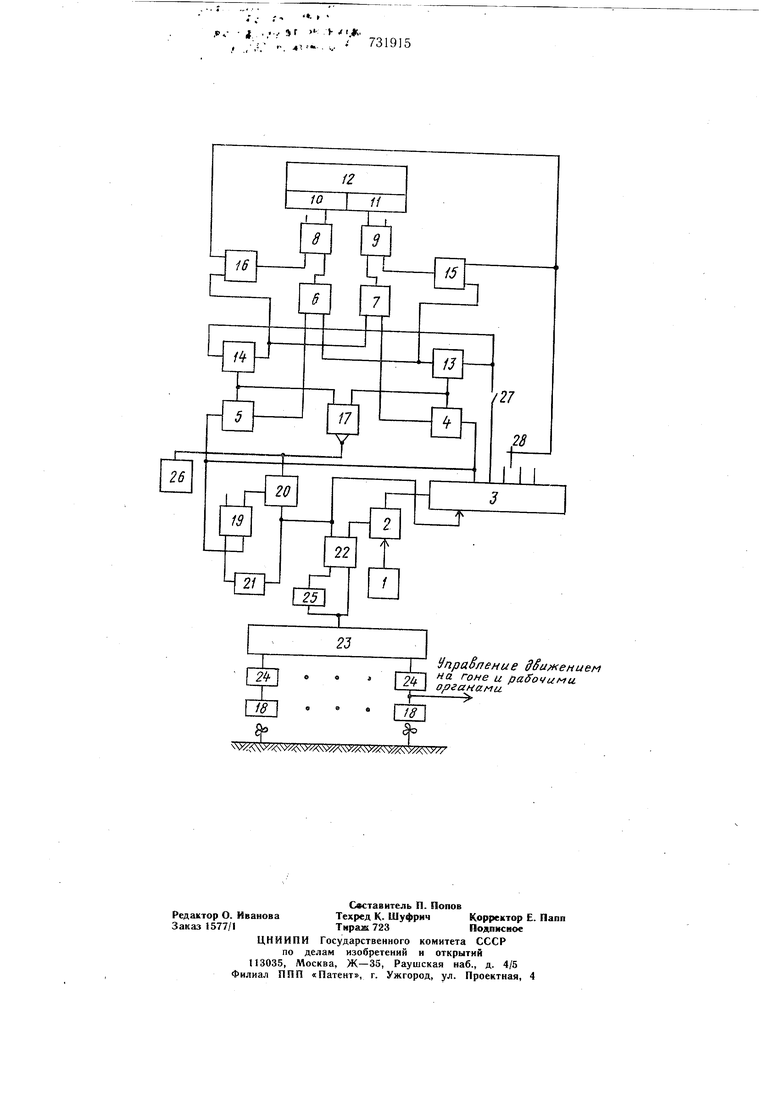
На чертеже изображена блок-схема предлагаемого устройства.
Блок разворота состоит из генератора импульсов пути 1, соединенного через схему 2 совпадения со счетчиком 3. Один из выходов счетчика 3 соединен через схемы 4 и 5 совпадения и элементы ИЛИ 6 и 7 со входами триггеров 8 и 9 поворота. Выходы триггеров 8 и 9 поворота соединены со входами 10 и 11 сервоприводов исполнительных механизмов 12 поворота. Второй выход счетчика 3 соединен с входами схем 13 и 14 совпадениям выходы которых соединены через элементы ИЛИ 15 и 16 со входами сброса триггеров 8 и 9 поворота. Другие входы элементов ИЛИ 15 и 16 соединены с третьим управляющим выходом счетчика 3. Триггер 17 направления разворота имеет счетный запуск и соединен своими выходами со входами схем 4, 5, 13, 14 совп&дения. С целью исключения ложных переключений триггера 17 направления разворота при попадании агрегата в зону больших пропусков растений на поле, когда последние отсутствуют одновременно -на всех охваченных датчиками 18 растений рядах, в состав блока разворота включен триггер 19, управляющий выход которого соединен со входом схемы 20 совпадения, а выход этой,схемы соединен с запускающим входом триггера 17. Вход включения триггера 19 соединен с первым выходом счетчика 3, а вход сброса через устройство 21 задержки - с выходом триггера 22 запуска и сброса, который соединен также и с другим входом схемы 20 и с входом сброса счетчика 3. Для управления триггером 22 на входе блока разворота имеется многовходовая схема 23 совпадения, входы которой соединены через инверторы 24 с выходами датчиков 18, а выход со входами управления триггера 22, причем вход запуска соединен непосредственно, а вход сброса - через инвертор 25, 26 - устройство начальной установки первого поворота. Устройство выключает выключатель 27 и переключатель 28.
Устройство работает следующим образом.
При нахождении агрегата на гоне на выходах датчиков 18 растений имеются уровни (считаем, что растения имеются в чувствительных зонах всех датчиков, т. е. пропусков растений на рядах нет). Уровни инвертируются инверторами 24 в нули и подаются на входы схемы 23 совпадения, на выходе схемы 23 при этом установлен уровень 0. Блок разворота не функционирует так как на правом по схеме выходе триггера 22 запуска и сброса установлен по соответствующему входу уровень О, который запрещает прохождение импульсов пути через схему 2 совпадения с генератора 1 на
счетчик 3. В момент выхода агрегата за пределы поля исчезают-растения в чувствительных зонах датчиков 18. На их выходах устанавливаются уровни нулей. Эти нули инвертируются инверторами 24 в единицы и, поступая на входы схемы 23 совпадения, вызывают появление уровня на ее выходе. При этом триггер 22 переключается в режим запуска, т. е. на правом его выходе устанавливается уровень, который дает разрещение прохождению импульсов через схему 2 совпадения с генератора 1 на вход счетчика 3. Таким образом в момент выезда агрегата за пределы поля происходит включение блока разворота.
Сигнал на первом выходе счетчика 3 появляется только после того, как на его вход поступит определенное количество импульсов, установленное предварительной регулировкой. Это количество определяет отрезок времени, в течение которого агрегат движется прямолинейно, так как в это время напряжение на выходах триггеров 8 и 9 отсутствует. После этого на первом выходе счетчика 3 появляется импульс, который проходит через схему 4 совпадения (предполагаем наличие уровня, например, на правом выходе триггера 17 направления разворота, обеспечиваемое начальной установкой первого поворота), элемент ИЛИ 7 на вход триггера 9 правого поворота, устанавливая уровень на его выходе, соединенном со входом правого поворота сервопривода, в результате чего агрегат начинает производить правый поворот. Очередной после момента начала правого поворота импульс на входе счетчика 3 приводит к исчезновению сигнала на его первом выходе (счетчик может быть построен, например, на основе регистра сдвига). Агрегат осуществляет правый поворот до тех пор, пока на втором выходе счетчика 3 не появится сигнал. Это происходит после поступления на вход счетчика очередного количества импульсов, которое определяет длину участка правого поворота. Появивщийся на втором выходе счетчика 3 импульс проходит через схему 13 совпадения, элемент ИЛИ 6 на вход включения триггера 8 левого поворота и одновременно через элемент ИЛИ 15 на вход выключения триггера 9 правого поворота. Так, в момент появления на втором выходе счетчика 3 импульса происходит переключение сервоприводов поворотного механизма из режима правого в режим левого поворотов. Левый поворот продолжается до момента появления импульса на третьем выходе счетчика 3. Этот импульс поступает одновременно через элементы ИЛИ 15, 16 на входы сбросов триггеров 8 и 9. При этом на выходе триггера 8 устанавливается уровень О, а триггер 9 остается в выключенном состоянии (по выходу, соединенному с сервоприводом). В результате, начиная е момента появления импульса на третьем выходе счетчика 3, агрегат движется прямолинейно до встречи с рядками растений. При появлении в чувствительных зонах датчиков 18 растений на их выходах устанавливаются уровни, которые инвертируются в нули инверторами 24. На выходе схемы 23 совпадения устанавливается уровень О, который инвертируется инвертором 25 в уровень и переключает триггер 22 запуска и сброса в состояние сброса, т. е. уровень устанавливаётся на его левом выходе. Нуль на правом выходе триггера 22 запрещает дальнейшее прохождение импульсов через схему 2 совпадения с генератора 1 на счетчик 3. Одновременно уровнем на левом выходе триггера 22 производится сброс счетчика 3 и переключение триггера 17 направления разворота в противоположное состояние (триггер 17 имеет счетный запуск), т. е. на левом его выходе устанавливается уровень, а на правом - уровень 0. Вследствие этого при следующем выезде за пределы поля импульсы с первого и второго выходов счетчика 3 будут проходить через схемы 5 и 14 (а не 4 И 13, как во время предыдущего разворота). А поскольку выходы схем 5 и 14 соединены через элементы ИЛИ 6 и 7 с входами триггеров 8 и 9 в обратном по сравнению с выходами схем 4 и 13 порядке, то и очередность включения триггеров 8 и 9 будет обратной, по. сравнению с очередностью их включения пои предыдущем развороте. А значит, и разворот будет производиться в противоположном направлении (в данном случае налево). Уровень на левом выходе триггера 22 поступает через устройство 21 задержки на вход триггера 19 и устанавливает его в состояние О на правом выходе, что запрещает прохождение сигналов через схему 20 совпадения на триггер 17 во время нахождения машины на. гоне. Такой сигнал может появиться после прохождения машиной больших пропусков растений (прогалин) когда растения отсутствовали одновременно на всех захватываемых датчиками 18 рядках. При этом входные устройства схемы отрабатывают как на выезд за пределы поля и при появлении после прогалины первого растения могло бы произойти ложное переключение триггера 17 направления разворота. Наличие триггера 19 и схемы 20 совпадения исключает это ложное переключение, а предварительной регулировкой устанавливают величину промежутка прямолинейного движения траектории разворота таким, чтобы перекрыть возможные прогалины на поле. Выше описана работа схемы при движении агрегата по траектории разворота, которая представляет собой часть окружности, длиной больше половины. В этом случае выключатель 27 находится во включенном положении. При выключенном положении этого выключателя и соответствуюш,ем подборе положения переключателя 28 устройство позволяет разворачивать агрегат по траектории, которая представляет собой половину окружности. Предлагаемое изобретение позволяет полностью автоматизировать работу самоходных агрегатов. Применение его в сельском .хозяйстве позволит получить значительный экономический эффект, высвободить большое количество квалифицированных специалистов, при этом один рабочий в состоянии обслужить несколько агрегатов. Формула изобретения 1. Устройство для автоматического направления движения самоходных агрегатов, включающее чувствительный элемент, программныи блок и элементы сервопривода исполнительных механизмов, отличающееся тем, что, с целью автоматического разворота агрегата в конце гона, программный блок снабжен схемой разворота, содержащей задающий генератор, соединенный через схему совпадения со счетчиком, к другому входу которого подключен один выход схемы сброса, второй выход которой соединен со схемой совпадения, а входы непосредственно и через инвертор связаны с выходом чувствительного элемента, при этом выход счетчика соединен с двумя каналами управления сервоприводом, на вход которых включен триггер поворота, связанный с устройством начальной установки первого поворота и схемой сброса. 2. Устройство по п. 1, отличающееся тем, что каналы управления Выполнены из двух последовательно включенных схем совпадения, элементов ИЛИ и выходных триггеров, причем входы с.хем совпадения соединены с выходом триггера поворота. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 442758, кл. А 01 В 69/04, 1973. 2.Авторское свидетельство СССР № 615880, кл. А 01 В 69/04, 1977 (прототип).
;.- .-
р,- . ... r ь
. -v-;.. 4--. .
731915
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического направления движения самоходных агрегатов | 1980 |
|
SU898974A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| Устройство для автоматического вождения сельскохозяйственных агрегатов | 1981 |
|
SU1034628A1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| Устройство для управления электроприводами разветвленных конвейерных линий | 1971 |
|
SU485533A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСОМ МАГНИТНОЙ ЛЕНТЫ | 1987 |
|
RU1540558C |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Система управления поточной линией для приготовления стекольной шихты | 1983 |
|
SU1168517A1 |
| Автомат управления рабочими органами прореживателя растений | 1972 |
|
SU447122A1 |
2
Управление дёи ением на Гоне и ра5очими. о/зганами
