Предметом .изобретения является бесконтактное регулирующее устройство с применением однафазного 5шдукц,ион,ного элемента в качестве датчика и двухфазного асинхронного двигателя, управляемого через траисформ аторы с подмагничиванием ПОСТОЯННЫМ током, в качестве серводвигателяПредлагаемое устройство отличается тем, что выходное напряжение датчика, пропорциональное углу его поворота, подано .на управляющую обмотку диферевциального трансформатора, две независимые вторичные обмотк ; которого через выпрямительные .мостики включены на управляющие обмотки двух трехсердеЧН-иковых ди-ференциальных трансс:)орматоров со вторичными абмотка1ма{, соединенными между собой .навстречу л пряхлюченвыми к управляющей обмотке серводвигателя.
В предлагаемое устройства вв.едеиа агтатиЧ-еская поправка (электрпчсс;:яя стаб1;л :зацк 1) путем применения дополнительной следящей системы, аналогичной разобранной выше, связанной своим датчиком при помощи двух противопололсно действующих пружин с основным датчиком, с осью которого .при помощи м.еханического дифер енциала
связан серводвигатель дополнительного хтедящего устройства.
В варианте предлагаемого бесконтактного регулирующего устройства применен в качестве датчика однофазный СельсЕн, связанный через диференциальный сельсин и сельсин, соединенный своей .осью с ;1змеритеиьным элементом обратной связи, .с управляющей обмоткой диференциального трансфорлгатора.
Бесконтактноерегзлирующее
Зстройство может быть применено для .регзлирования небыстро протекающих инерционных процессов, например тепловых (регулирование горения), как по статической характеристике с любой желаемой статичностью, raic i по астатической характеристике с любой желаемой скоростью астатической погфавки.
На фиг. I-3 представлены :хемы Еыполнен1 я предлагаемого устройства.
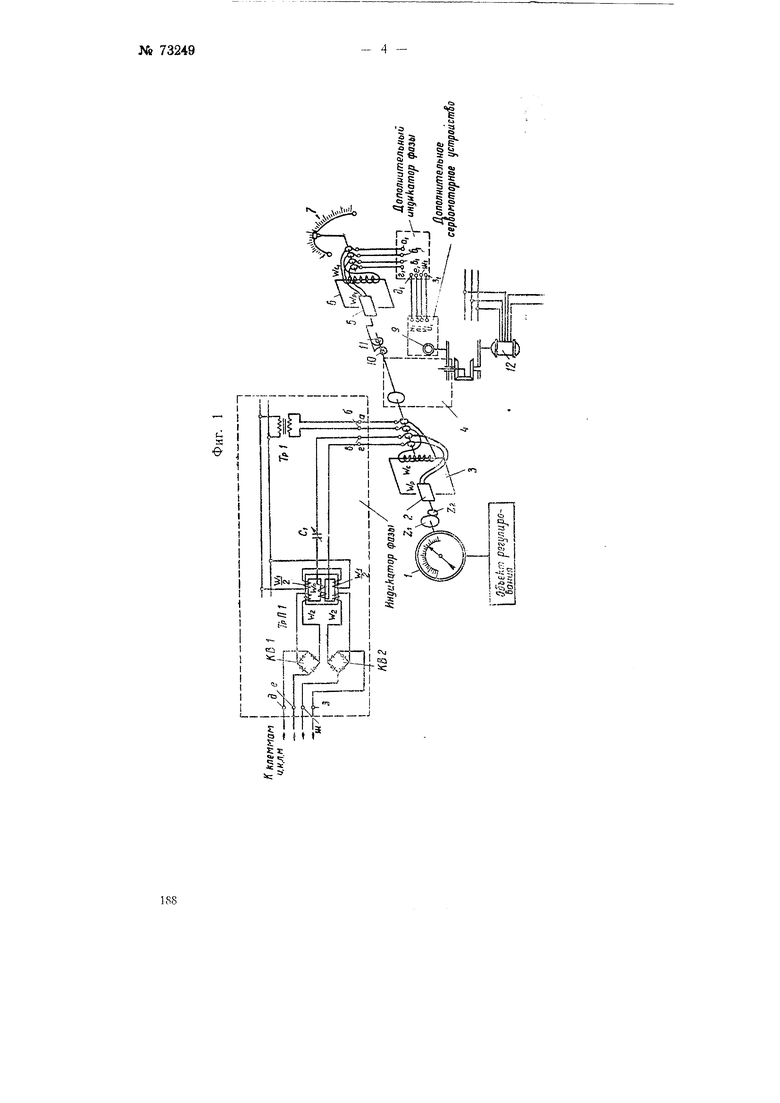
Регулирующее устройство, изобраукенное на фиг. 1, имеет следующие особенности.
В качестве датчика используется однофазный индукционный эле.ент, состоящий из paiMKH 2 с обмоткой WP , соединенной зубчатой передачей Z| и Zs с осью измерительного прибора /; рамка вращается в переменном магн.итном поле, создаваемсм обмоткой IF., намотанной иа сердечник 3. Обмотка 17с получает питааке от сени, через трансформатор Тр1, 1слем1мы а и б -и коятактные кольца, насаженные на ось датчика.
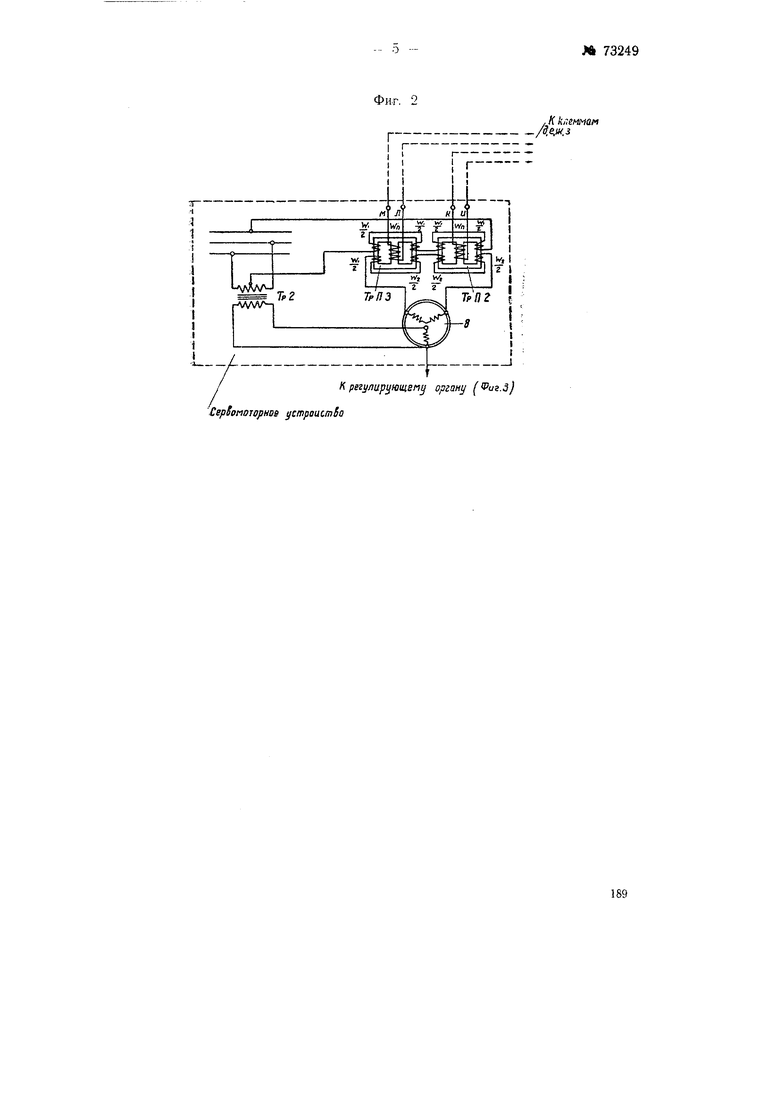
Серводвигателем служит двухс))азный асинхронный двигатель 8 (фиг. 2), который унравляется через диференциальные трехсердеч.никоБые тра1нсформаторы ТрП2 л ТрПЗ, подмагничтшаемые ностоянНЬШ ТОКОМ.
Выходное напряжение датч1ика, пронорцИОнальное углу его поворота, через контактные кольца и клеммы в, г я конденсатор С подается на управляющую обмотку W п диференциального трансформатора ТрП1, две незавие имые обмотки Wz которого через выпрямительные мостики КВ1 :И КВ2 включены через клеммъ д, е, ох, з, и, к, л и м. на управляющие обмотки: Wn диференц.иальных трансформаторов ТрП2 и ТрПЗ. Вторичные
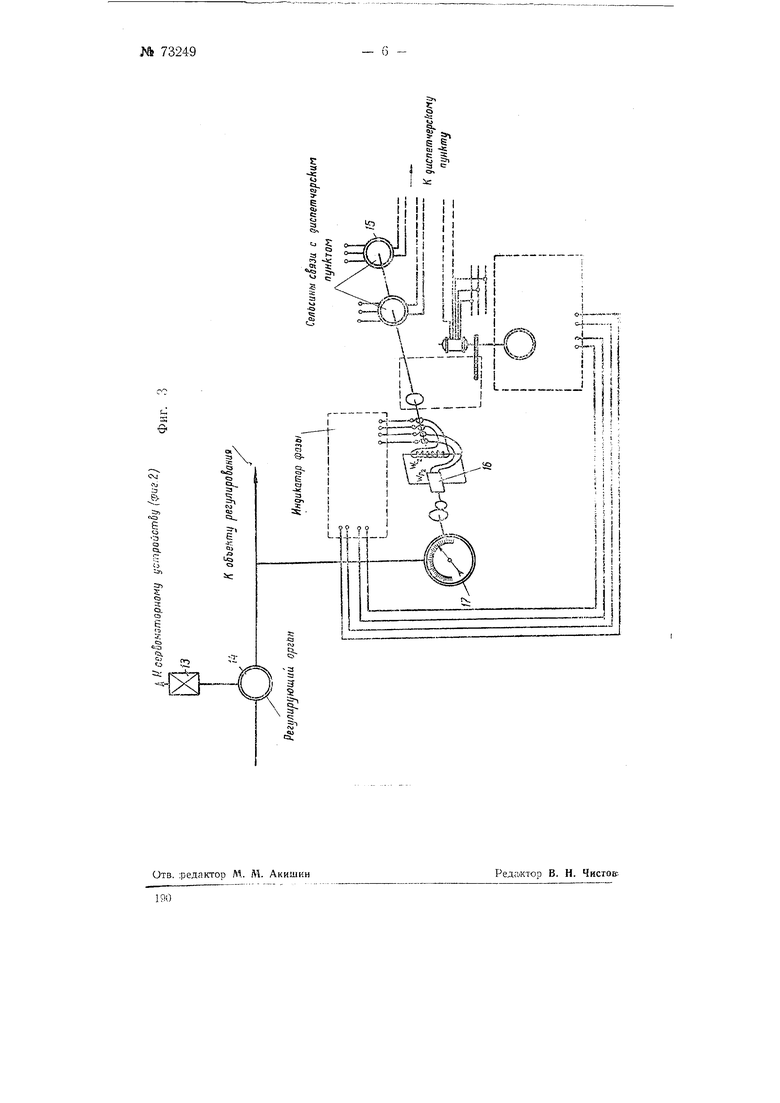
этих трансформатароз соединены между собой навстречу я и.рнключены к управляющей обмотке серводвигателя 8- Вторая фаза сер-водвигателя 8 л итается от сети и через трансформатор Тр2. Механическое ,воздействи е на регуЛИрующий орган 14 (фиг. 3) осуществляется через редуктор 13.
W,
Первичные обмотки -,-- трансформаторов ТрП1 (фиг. 1), ТрП2 и ТрПЗ (фиг. 2) подключены к сети переменного тока.
Для введения астатической поправки используется дополнительная следящая система аналогичного типа со СВОИМ датчико,м, и-:меющим аналогичную вращающуюся в магiiHTHOM иоле рамку 5 с обмоткой , где магнитное поле создается обмоткой IFfj, намотанной на сердечник 6. Питание обмотки , и управление дополнительным сервомофорньш устройством астатической поправки 9 осуществляется через дополнительный индикатор фазы. Измерительный элемент обратной связи 7 связан с рамкой 5 аналогично разобранному.
186
Датчик при помощ-и двух противОПолс:л;;о де с вующих пружин 10 и 11 связан с осис-вны;,: датчиком 2-. С осью последнего связан также при помощи механического днференц|;)ала 4 серводвигатель 12 дополнительного апедящего устройства.
В дополаительнол варианте бесконтактного регулирующего устройства, изображенном на фиг. 3, датчикол одно.фаэный сельсин, связанный через диференциальны сельспн 15 ,и сельсин 15, соединепнь;й осью с измерительным элементом обратной связи 17, с Заправляющей обмоткой дифереициальиого трансформатор а.
Для диспетчерского уиравлеНИя применяются сельсины связи с дисп етчер с ки м пуи ктсм.
П р е д .м е L- 3 о б р е т е н и я
1.Бесконтактное регулирующее устройство с применением однофазного индукционного эл1е1мента з качестве датчика и двухфазного асинхронного двгптателл, управляемого через трансформаторы с подмагнич,иванием постоянным токо.м, в качестве серводвигателя, отличаю щее с я тем, что выходное напряжение датчика, нроиорино/ьзльное углу его новорота, подано на управляющую обметку дмфер-епцигльного трансформатора ТрП1, две независимые вторичные обмотки которого через выпрямительные мостиюи включены на управляющие обмо-тки двух трехсердечниковых диференциальных транс форматор о; со вторичными o6iMOTKaivni. соединенными между со|бой навстречу и приключеиатыми к управляющей обмотке сер водвигател я.
2.При устройстве по п. 1 применение для введения астатической поправки дополнительной -следящей системы аналогичного типа, связанной своим датчиком н-ри помощи двух противоположно действующих пружин с ОСНОВНЫМ датчиком, с осьо которого при помощ; механического диференциала связан серводвигатель дополнительного следящего устройства.
3.В устройстве ло п.п. 1 и 2 применение в качестве датчика одно-.фазного сельси-на, связанного через .диференциальный сельсия и сельсин, .соедкненный своей осью с измерйтельньлм элементом обратной связи, с управляющей обмоткой диоЬере};циального транс(рор;мато1ра.
4.Форма выполнения устройства по п. 1, отличающаяся тем, что, с целью полученрш различных .зависимостей угла рассогласования
от величины отклонения регулируемой величины от заданного значения, пpи ;eкeиo бесконтактное тор.03,ное устройство в виде связанной с осью датчика двухфазной индукционной системы, одна обмотка которой включена на сеть, а вторая питается от двух диференциальных трансформаторов с подмагничиваниг:. постоянным током, получающих питание от напряжения, сдвинутого по фазе на 90° относительно напряжения указанной сети, ;: подмагн нчивае1мых пр.и помощи управляющих обмоток, включенных через выпрямительные мостики на вторичные обмотки трансформатора ТрП1.
i
«y
Sj:
К регулир1}ющепу органу (иг.З)
epSonowpnaa устройство
Фн.г. 2
, К kiiiMMuM - /o,W3
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шиберами | 1941 |
|
SU64065A1 |
| Устройство для управления реверсивным электроприводом | 1941 |
|
SU63022A1 |
| Устройство для питания газосветных ламп | 1940 |
|
SU60679A1 |
| Следящий привод | 1941 |
|
SU67550A1 |
| СИНХРОННО-СЛЕДЯЩИЙ ПРИВОД | 1943 |
|
SU110213A1 |
| БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ | 1944 |
|
SU67797A1 |
| УСТРОЙСТВО для БЕССТУПЕНЧАТОГО | 1965 |
|
SU171240A1 |
| Бесконтактный сельсин и фазорегулятор | 1939 |
|
SU56183A1 |
| Схема включения двух сдвоенных бескон-ТАКТНыХ СЕльСиНОВ | 1979 |
|
SU828201A1 |
| Устройство для измерения давления | 1960 |
|
SU136579A1 |