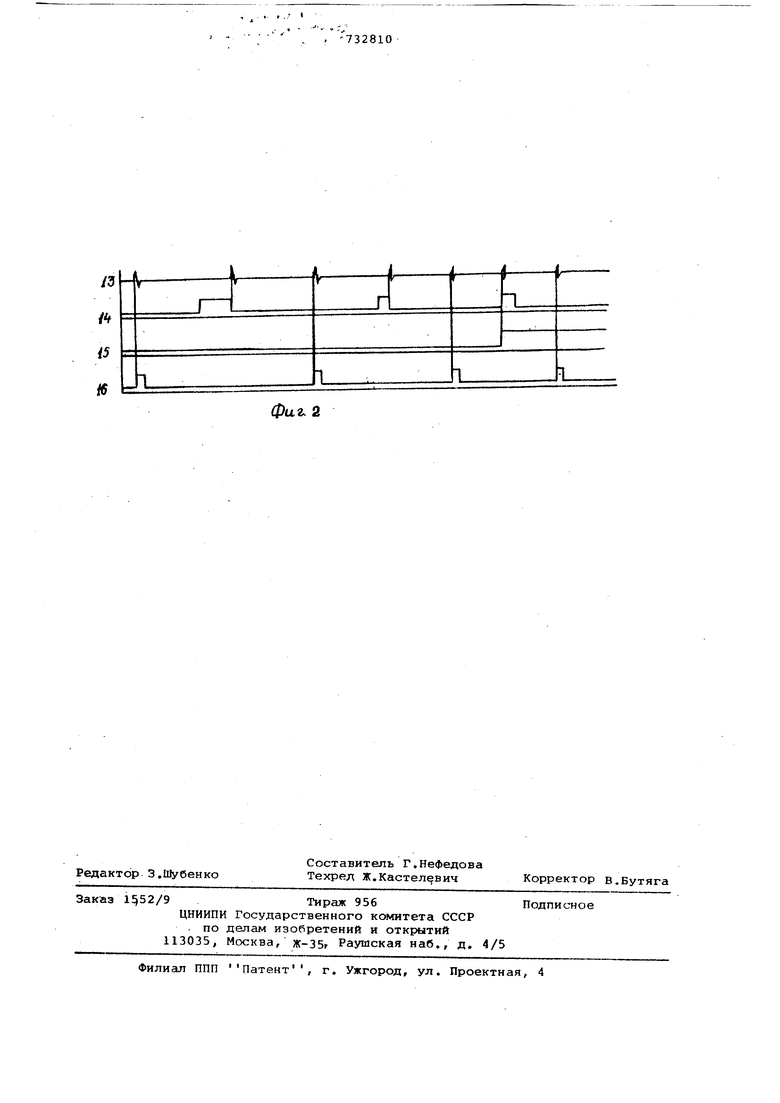
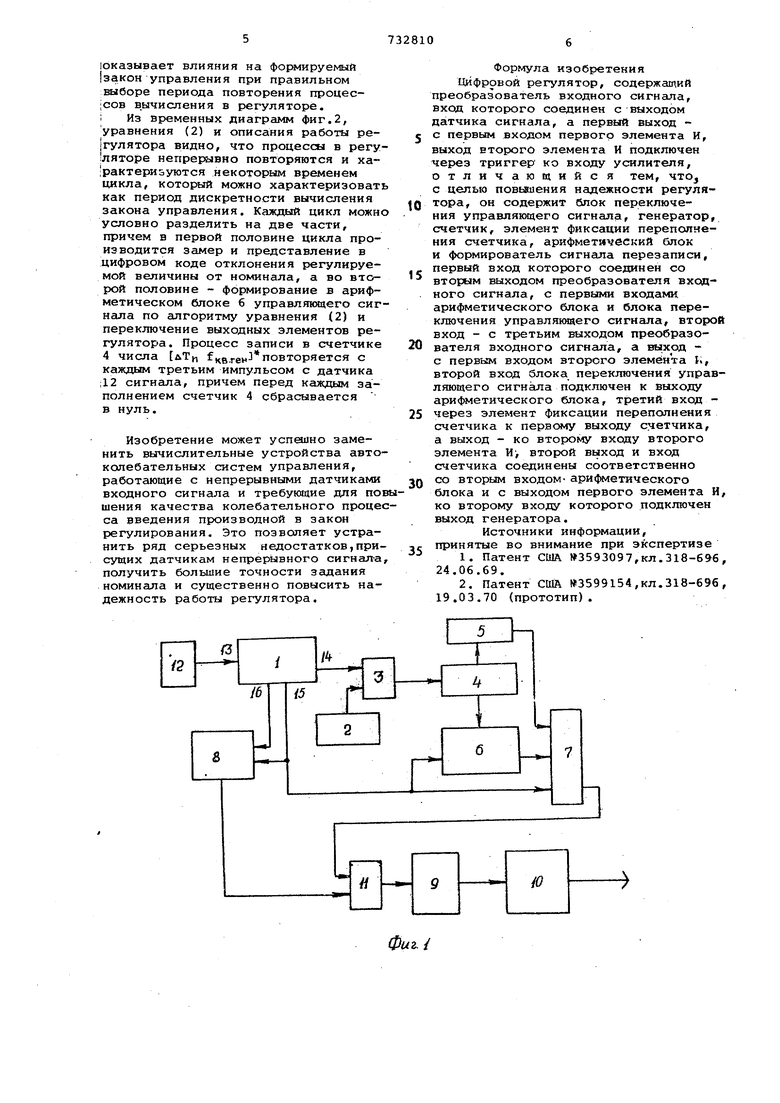
Изобретение относится к вычм-слительной технике и может быть использовано для формирования нелиней ного закона управления в системах автоматического управления. Известны цифровые регуляторы 1 и 2. Наиболее близким по технической сущности к предлагаемому является цифровой регулятор, содержащий преобразователь ВХОДНОГО сигнала, вход которого соединен с выходом датчика сигнала, а первый выход - с первым ВХОДОМ первого элемента И, выход второго элемента И подключен через триггер ко ВХОДУ усилителя 2. Недостаток этого регулятора малая надежность работы. Це.пь изобретения - повышение надежности регулятора. Цель достигается тем, что в -известный цифровой регулятор введены блок переключения управляющего сигнала, генератор, счетчик, элемент фиксации переполнения счетчика, ар метический блок и формирователь си нала перезаписи, первый вход которого соединен со вторым выходом пр разователя ВХОДНОГО сигнала, с пер выми входами арифметического блока и блока переключения управляющего сигнала, второй вход - с третьим выходом преобразователя входного сигнала, а ВЫХОД - с первым входом второго элемента И, второй вход блока переключения управляющего сигнала подключен к выходу арифметического блока, третий вход - через элемент фиксации переполнения счетчика к первсячу ВЫХОДУ счетчика, а выход ко второму ВХОДУ второго элемента И, второй ВЫХОД и ВХОД счетчика соединен соответственно со вторым входом арифметического блока и с выходом первого элемента И, ко второму входу которого подключен выход генератора. На фиг.1 представлена функциональная схема цифрового регулятора; на фиг.2 - :временные диаграммы работы преобразователя входных сигналов ци цифрового регулятора. Цифровой регулятор включает преобразователь 1 ВХОДНЫХ сигналов генератор 2, первый элемент И 3, счетчик 4, элемент 5 фиксации переполнения счетчика 5, арифметический блок 6, 6.ЛОК 7 переключения управляющего сигнала, формирователь 8 сигналс1 перезаписи, триггер 9, усилитель 10, второй элемент И 11, датчик 12 сигнала. Показаны также сигнал на входе 13 преобразователя входных сигналов, сигналы на первом, втором и третьем выходах 14, 15 и 16 преобразователя входных сигналов. На первом выходе 14 преобразователя 1 входного сигнала выделяется сигнал разности между длительностью сигнала задания номинала с периодом сигнала входного датчика 12. На второмвыходе 15 преобразователя 1 формируется сигнал знака отклонения регулируемой величины от номинала. На третьем выходе 16 преобразова теля 1 формируется сигнал такта работы цифрового регулятора, определя мый частотой входных импульсов. При большом отклонении регулируе мой величины от заданной (режим ста та и смены уровней задания) счетчик 4переполняется, срабатывает элемен 5фиксации переполнения счетчика и сигнал на выходе блока 7 переключения управляющего сигнала вырабатывается только в функции знака откл нения регулируемой величины от номи нала (второй выход 15 преобразователя 1) . В случае движения систег-сл регули рования в автоколебательном режиме около номинала (основной режим рабо лл регулятора) переполнения счетчик 4 не происходит и выходной сигнал регулятора формируется арифметическ блоком 6. Алгоритм работы регулятора можно записать следующим образом: 5f(«Sigr nT y nT, (1) где y(t) - сигнал на выходе усилителя 10 J - цифровое значение пропор циональной составляющей закона управления в п-но цикле; у.ЕпТ} - цифровое значение дифференциальной составляющей закона управления в п-но . цикле. В применении к формируемым в рег ляторе сигнсшам,алгоритм работы мож записать так: :, к -t ViWrettri(2) . где AT.,ATf, - временные интервалы знакопеременные, характеризующие разно между длительностью сигнала задания номи нала и периодом сигнала входного датчика 12 в n-1-OM и в циклах ,- частота кварцевого генератора 2. Регулятор работает следующим образом. Пусть в некоторый момент времени на вход преобразователя 1 входного сигнала поступает сигнал 13с датчика 12. На первом выходе преобразователя 1 входного сигнала через интервал времени, определяемый длительностью сигнс1ла задания номинсша, выделяется сигнал 14 разности между длительностью сигнала задания номинала и периодом сигнала датчика 12. Производя логическое перемножение сигнала 14 и сигнала с кварцевого генератора 2 посредством первого элемента И 3, в счетчике 4 получаем цифровое значение отклонения регулируемой величины от номинала - значё ие л, Tfиз ген 5 ° числа №,к,в.ген1 передается из счетчика 4 в арифметический блок 6, в котором производятся операции по алгоритму уравнения (2), причем цифровое значение .Т. кагеи памяти арифметического блока 6 сохраняется от предыдущего цикла вычисления. Поскольку счетчик 4 не был переполнен, то сигнал на выходе блока 7 переключения управляющего сигнала вырабатывается в функции знака от преобразования по уравнению (2) согласно выходному сигналу арифметического бло:ка 6. Если в данном цикле вычисления закона управления отклонения &Тп и имеют один и тот же знак, т.е. сигнал 15 на втором выходе преобразователя 1 не изменяется, то сигнал (тактовый импульс) 16 с третьего выхода преобразователя 1 проходит через формирователь 8 сигнала перезаписи,, разрешая изменение (подтверждение) состояния триггера 9 согласно сигналу с блока 7 переключения управляющего сигнала. Если же в данном цикле вычисления закона управления знаки отклонений uTv, и й.Trt. различны, то тактовый импульс 16 с третьего выхода преобразователя 1 не проходит через формирователь 8 сигнала перезаписи и переключения триггера 9 не происходит. Необходимость включения в регулятор формирователя 8 сигнала перезаписи обусловлена тем, что в мсячент перехода регулируемой величины через номинал лервая разность, вычисляемая согласно уравнению (2 может иметь любой знакам величину, поскольку f в. rg и 3 вычисляете я после прохождения номинсШа, а .ч fKB.rewl до номинала, и по абсолютной величине эти значения могут быть любыми. Введение данного.запрета на переключение выходного сигнала регулятора не
юкаэывает влияния на формируемый закон управления при правильном выборе периода повторения процес:сов в.ычисления в регуляторе. ; Из временных диаграмм фиг.2. уравнения (2) и описания работы ре{гулятора видно, что процессы в регу|ляторе непрерывно повторяются и ха;рактери5уются некоторым временем цикла, который можно характеризоват как период дискретности вычисления закона управления. Каждый цикл можн условно разделить на две части, причем в первой половине цикла производится замер и представление в цифровом коде отклонения регулируемой величины от номинала, а во второй половине - формирование в арифметическом блоке 6 управляющего сигнала по алгоритму уравнения (2) и переключение выходных элементов регулятора. Процесс записи в счетчике 4 числа дТ„ fneren повторяется с каждым третьим импульсом с датчика ;12 сигнала, причем перед каждым заполнением счетчик 4 сбрасывается в нуль.
Изобретение может успешно заменить вычислительные устройства автоколебательных систем управления, работающие с непрерывными датчиками входного сигнала и требующие для повшения качества колебательного процесса введения производной в закон регулирования. Это позволяет устранить ряд серьезных недостатков,присущих датчикам непрерывного сигнал-а, получить большие точности задания номинала и существенно повысить надежность работы регулятора.
Формула изобретения ЦИФРОВОЙ регулятор, содержащий преобразователь входного сигнала, вход которого соединен с выходом датчика сигнала, а первый выход с первым входом первого элемента И, выход второго элемента И подключен через триггер ко входу усилителя, отличающийся тем, что, с целью повьйзения надежности регулятора, он содержит блок переключеoния управляющего сигнала, генератор, счетчик, элемент фиксации переполнения счетчика, арифметический блок и формирователь сигнала перезаписи, первый вход которого соединен со
5 вторым выходом преобразователя входного сигнала, с первыми входами арифметического блока и блока переключения управляющего сигнала, второй вход - с третьим выходом преобразо0вателя входного сигнала, а выход с первым входом второго элемента t., второй вход блока переключения управляющего сигнала подключен к выходу арифметического блока, третий вход 5через элемент фиксации переполнения счетчика к первому выходу счетчика, а выход - ко второму входу второго элемента И, второй выход и вход счетчика соединены соответственно со вторым входом- арифметического
0 блока и с выходом первого элемента И, ко второму входу которого подключен выход генератора.
Источники информации, принятые во внимание при экспертизе
5
1. Патент США №3593097,кл.318-696, 4иЪ Ъу ,
2. Патент США №3599154,кл.318-696 , 19.03.70 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой регулятор | 1979 |
|
SU892403A2 |
| Цифровой регулятор | 1982 |
|
SU1091117A1 |
| Аналого-цифровой регулятор | 1980 |
|
SU894667A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство для централизованного контроля параметров | 1982 |
|
SU1059547A1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| Устройство для вычисления коэффициентов дискретного преобразования Фурье | 1979 |
|
SU877556A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1084852A1 |