Изобретение относится к области робототехники и может использоваться при разработке алгоритмов управления движением двухкоординатного пятизвенного манипулятора, перемещающего объект по двум координатам (в станках и роботах). Двухкоординатный пятизвенный манипулятор (фиг.1а) состоит из двух вращательных приводов (D1 и D2), расположенных на основании (звено 1) и соединенных кинематической цепью из четырех звеньев (2, 3, 4, 5) и трех вращательных кинематических пар (А, В, С). Длины звеньев манипулятора - это расстояния между осями кинематических пар: l1=D1D2; l2=D1B; l3=ВА; l4=АС; l5=CD2. Такой манипулятор имеет две степени свободы и применялся ранее как составная часть механизма робота-станка (патент РФ №2202465). Два угла q1 и q2 (фиг.2а) в приводных кинематических парах определяют положение звеньев манипулятора, в том числе и выходного звена (звено 3 или 4), на котором расположен объект манипулирования (точка А). Декартовы координаты точки А определяются решением прямой задачи о положении по заданным приводным координатам. В зависимости от того, расположены точки А, В, С против часовой стрелки либо по часовой стрелке в треугольнике АВС, решение прямой задачи о положении принадлежит сборке 1 механизма (фиг.1а) либо сборке 2 (фиг.1с). Перемещением манипулятора из одной сборки в другую существенно увеличивается его зона обслуживания (множество возможных положений точки А).
В случае, когда l3+l4+l5<l1+l2 и l1+l5>l2+l3+l4 либо оба привода расположены с одной стороны от плоскости пятизвенника, этому перемещению препятствует так называемое особое положение (фиг.1b), когда точки А, В, С расположены на одной прямой и механизм имеет возможность неуправляемого движения. Поэтому механизм перемещается в другую сборку с уменьшением числа степеней свободы на 1 за счет прижатия одного из звеньев к соответствующему ограничителю угла в свободной вращательной кинематической паре механизма управляемым усилием и силами нагрузки на механизм. Выбор ограничителя угла производится в соответствии с предполагаемым значением внешних сил нагрузки на механизм и сил инерции звеньев при проходе особого положения. После перехода в другую сборку звено отходит от ограничителя угла, и манипулятор снова может перемещать объект по двум координатам. Перемещение в другую сборку становится управляемым и не требует применения дополнительных устройств. Дополнительная рабочая зона может использоваться как зона загрузки инструмента или заготовки и тем самым позволяет использовать один и тот же манипулятор для выполнения технологических и транспортных операций.
Известен способ увеличения зоны обслуживания манипуляторов параллельной структуры за счет перехода в другую сборку механизма [патент DE 10206414А1]. Для пятизвенного двухкоординатного манипулятора с двумя параллельными поступательными кинематическими парами предлагались следующие методы прохода особых положений:
1. С применением дополнительного двигателя, устанавливаемого в свободный шарнир. При проходе особого положения дополнительный двигатель включается, а один из двух основных приводов не создает момента, т.е. изменяется структура механизма.
2. С применением тормозной муфты, устанавливаемой в свободную кинематическую пару. В механизме с двумя параллельными поступательными кинематическими парами нет подходящей кинематической пары, поэтому авторы предложили добавить дополнительную группу звеньев. При проходе особого положения тормозная муфта включается, число степеней свободы уменьшается на 1 и устраняется неуправляемое движение механизма.
3. С применением пружины кручения, устанавливаемой в свободную кинематическую пару. Эта пружина создает момент, позволяющий пройти особое положение в одном направлении. Для обратного перехода требуются другие способы.
4. С применением сил инерции. Перед проходом особого положения звенья механизма должны иметь достаточную скорость, чтобы во время прохода силы инерции могли уравновесить статические силы, действующие на механизм.
Первый способ требует увеличения массы звеньев механизма по причине установки дополнительного двигателя. Кроме того, дополнительный двигатель требует путей подвода электроэнергии, что усложняет конструкцию и уменьшает подвижность механизма.
Второй способ имеет те же недостатки, хотя тормозная муфта потребляет меньшую мощность, чем двигатель, при том же номинальном моменте.
Третий способ не позволяет совершить обратный переход в исходную сборку, поэтому не является достаточным для увеличения зоны обслуживания.
Четвертый способ не всегда может быть реализован, поскольку не всегда механизм может быть разогнан до требуемой скорости из-за возможностей привода. Кроме того, прочность объекта манипулирования и усилие его захвата ограничивают ускорение, с которым он может перемещаться.
Наиболее близким к предлагаемому способу по совокупности существенных признаков по отношению к предложенному решению является способ, изложенный в патенте RU 2202465 С2, опубл. 20.04.2003 для двухкоординатного пятизвенного манипулятора, звенья которого соединены вращательными кинематическими парами, одно из звеньев является неподвижным основанием, на котором установлены два привода, каждый из которых выполнен с возможностью поворота соединенного с ним соответствующего звена, имеющего ограничитель угла.
Недостаток способа заключается в отсутствии возможности управляемого перевода манипулятора в другую сборку.
Задача, на решение которой направлено данное изобретение, заключается в увеличении зоны обслуживания пятизвенного манипулятора, построенного на вращательных кинематических парах, за счет перехода в другую сборку без применения управляемых дополнительных устройств в его конструкции.
Поставленная задача решается за счет того, что производится исключение неуправляемого движения манипулятора в его особом положении уменьшением числа степеней свободы на 1 при прижатии одного из звеньев к соответствующему ограничителю угла поворота во вращательной кинематической паре силами внешней нагрузки либо управляемым усилием.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а анализ способов, предложенных в описаниях аналогов, позволил выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Способ управления двухкоординатным пятизвенным манипулятором реализуется следующим образом.
Для перехода манипулятора в другую сборку он должен пройти особое положение. Если конфигурация манипулятора близка к особому положению, то положением объекта манипулирования невозможно управлять по двум координатам, из-за того, что в особом положении моменты приводов стремятся к бесконечности при конечной силе нагрузки на механизм Fн (сила тяжести, сила трения, сила упругости от возможных разгрузочных устройств, сила инерции, фиг.2с, фиг.3с). Поэтому производится переключение способа управления одного из приводов с управления положением на управление моментом незадолго до прохода особого положения. В зависимости от направления силы нагрузки при проходе особого положения, показанного на фиг.2с и фиг.3с, эта сила прижимает звено 4 к ограничителю угла в шарнире С либо звено 3 к ограничителю угла в шарнире В. В соответствии с рассчитанной силой нагрузки выбирается привод, управляющий положением. У того привода, который поворачивает звено с используемым ограничителем угла, сохраняется управление положением, а другой привод переводится в режим управления моментом.
Если при особом положении механизма, в котором осуществляется переход в другую сборку, силы нагрузки препятствуют переходу механизма в эту сборку, то они прижимают звено 4 к ограничителю угла в шарнире С (фиг.2с). В этом случае во избежание удара звена и ограничителя следует заранее, когда еще можно управлять механизмом по обоим координатам q1 и q2 (фиг.2а), подвести звено к ограничителю угла (фиг.2b), изменяя эти координаты в указанных направлениях (фиг.2а). Затем привод D1 переводится в режим управляемого момента M1, который создает управляемую силу F34, прижимающую звено 4 к ограничителю угла, момент имеет отрицательное значение (по часовой стрелке). Это необходимо, так как силы нагрузки в положении манипулятора, показанном на фиг.2b, могут препятствовать прижатию звена к ограничителю угла. Число степеней свободы механизма становится равным 1, и он перемещается в особое положение, показанное на фиг.2с, за счет управления только углом q2. В процессе перехода в эту конфигурацию момент M1 плавно увеличивается до 0 (фиг.4а) по мере того, как силы нагрузки начинают прижимать звено 4 к ограничителю угла. При дальнейшем управляемом изменении угла q2 момент M1 снова выполняет задачу фиксации угла в шарнире С управляемым усилием (фиг.2d). Затем привод D1 переводится в режим управления положением и отводит звено 4 от ограничителя угла (фиг.2е). Манипулятор может перемещаться по двум координатам в добавленной части рабочей зоны (фиг.2f).
Если при особом положении механизма, в котором осуществляется переход в другую сборку, силы нагрузки способствуют переходу механизма в эту сборку, то они прижимают звено 3 к ограничителю угла в шарнире В (фиг.3с). В этом случае во избежание удара звена и ограничителя следует заранее, когда еще можно управлять механизмом по обоим координатам q1 и q2 (фиг.3а), подвести звено к ограничителю угла (фиг.3b), изменяя эти координаты в указанных направлениях (фиг.3а). Затем привод D2 переводится в режим управляемого момента M2, который создает управляемую силу F43, прижимающую звено 3 к ограничителю угла. Это необходимо, так как силы нагрузки в положении манипулятора, показанном на фиг.3b, могут препятствовать прижатию звена 3 к ограничителю угла. Число степеней свободы механизма становится равным 1, и он перемещается в особое положение, показанное на фиг.3с, за счет управления только углом q1. В процессе перехода в эту конфигурацию момент М2 плавно уменьшается до 0 (фиг.4b) по мере того, как силы нагрузки начинают прижимать звено 3 к ограничителю угла. При дальнейшем управляемом изменении угла q1 момент М2 снова выполняет задачу фиксации угла в шарнире В управляемым усилием (фиг.3d). Затем привод D2 переводится в режим управления положением и совместно с приводом D1 отводит звено 3 от ограничителя угла (фиг.3е). Манипулятор может перемещаться по двум координатам в добавленной части рабочей зоны (фиг.3f).
Указанный способ может быть реализован на устройстве, которое состоит из механизма плоского пятизвенника, построенного на вращательных кинематических парах, и двух приводов D1 и D2 (фиг.1a). Механизм плоского пятизвенника состоит из основания (неподвижное звено 1), звена 2, соединенного со звеном 1 приводной вращательной кинематической парой D1, звена 3, соединенного со звеном 2 вращательной кинематической парой В с ограничителем угла поворота, звена 4, соединенного со звеном 3 вращательной кинематической парой А, звена 5, соединенного с основанием приводной вращательной кинематической парой D2 и соединенного со звеном 4 вращательной кинематической парой С с ограничителем угла поворота. К звену 3 или 4 крепится объект манипулирования. Привод D1 расположен на основании, его вал соединен со звеном 2, ось вала совпадает с осью вращательной кинематической пары D1 механизма. Привод D2 расположен на основании, его вал соединен со звеном 5, ось вала совпадает с осью вращательной кинематической пары D2 механизма. Ограничители углов поворота могут быть дополнены упругими амортизаторами.
На фигуре 1 чертежа показаны две сборки механизма и его особое положение.
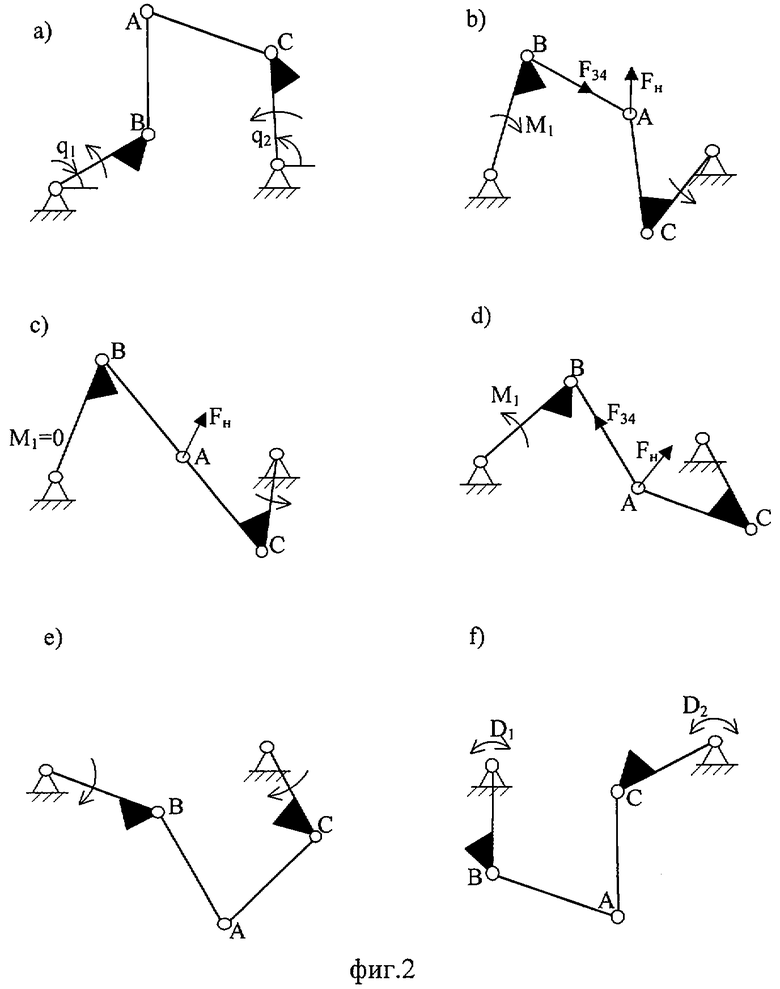
На фигуре 2 показана последовательность перехода механизма в другую сборку, когда сила нагрузки Fн препятствует переходу механизма в эту сборку, направление момента M1, создаваемого приводом D1, направление силы F34, с которой звено 3 (фиг.1a) действует на звено 4, и направления изменения приводных координат q1 и q2 на различных этапах движения.
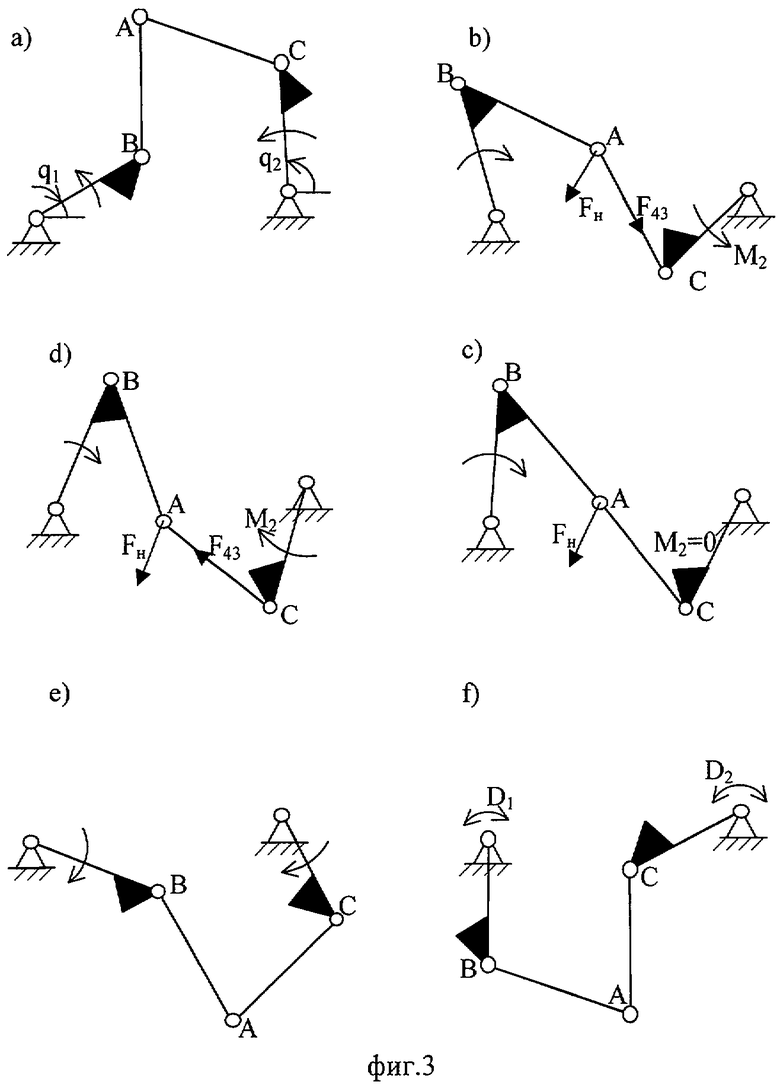
На фигуре 3 показана последовательность перехода механизма в другую сборку, когда сила нагрузки Fн способствует переходу механизма в эту сборку, направление момента М2, создаваемого приводом D2, направление силы F43, с которой звено 4 (фиг.1a) действует на звено 3, и направления изменения приводных координат q1 и q2 на различных этапах движения.
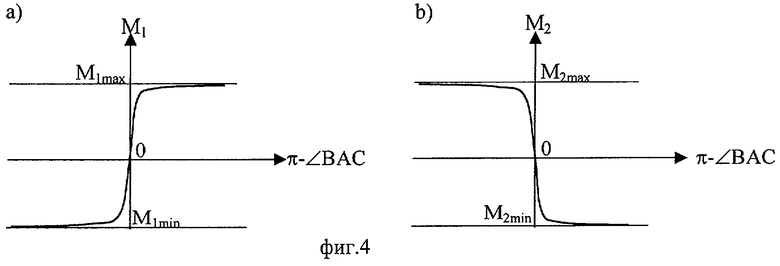
На фигуре 4а показана зависимость момента M1 от угла π-∠BAC для перехода манипулятора в другую сборку при управлении этим моментом.
На фигуре 4b показана зависимость момента М2 от угла π-∠BAC для перехода манипулятора в другую сборку при управлении этим моментом.
Для осуществления изобретения необходима возможность управления каждым приводом в режиме управляемого момента и в режиме управляемого угла и возможность автоматизированного переключения между этими режимами системой программного управления манипулятором. Кроме того, необходимы два ограничителя углов поворота в шарнирах манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИР МАНИПУЛЯТОРА | 2005 |
|
RU2283217C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2384398C2 |
| ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ) | 2005 |
|
RU2284896C1 |
| РЫЧАЖНЫЙ ПЯТИЗВЕННЫЙ МЕХАНИЗМ | 2020 |
|
RU2751011C1 |
| СФЕРИЧЕСКИЙ V-МАНИПУЛЯТОР | 2020 |
|
RU2730345C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2011 |
|
RU2475347C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2706079C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
Изобретение относится к области робототехники и предусматривает переход манипулятора из одной сборки в другую с уменьшением числа степеней свободы на 1. Звенья манипулятора соединены вращательными кинематическим парами, одно из звеньев является неподвижным основанием, на котором установлены два привода, каждый из которых выполнен с возможностью поворота соединенного с ним соответствующего звена, имеющего ограничитель угла. Для перехода из одной сборки с управляемым перемещением манипулятора по двум координатам в другую производят переключение управления одного привода с управления перемещением на управление усилием, под действием которого осуществляют прижим выбранного в соответствии с рассчитанной силой нагрузки звена манипулятора к соответствующему ограничителю угла в свободной кинематической паре. Одновременно другой привод, управляющий перемещением, переводит манипулятор в другую сборку, в которой осуществляют управление положением манипулятора по двум координатам. Изобретение позволит увеличить зону обслуживания пятизвенного манипулятора за счет перехода в другую сборку без применения управляемых дополнительных устройств в его конструкции. 4 ил.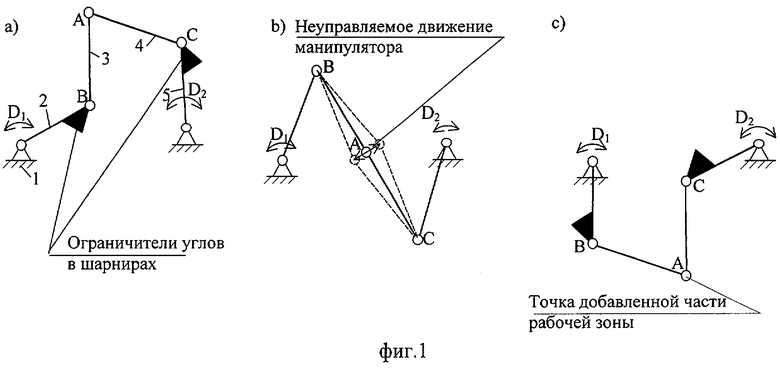
Способ управления двухкоординатным пятизвенным манипулятором, звенья которого соединены вращательными кинематическим парами, одно из звеньев является неподвижным основанием, на котором установлены два привода, каждый из которых выполнен с возможностью поворота соединенного с ним соответствующего звена, имеющего ограничитель угла, включающий переход манипулятора из одной сборки в другую с уменьшением числа степеней свободы на 1, отличающийся тем, что для перехода из одной сборки с управляемым перемещением манипулятора по двум координатам в другую производят переключение управления одного привода с управления перемещением на управление усилием, под действием которого осуществляют прижим выбранного в соответствии с рассчитанной силой нагрузки звена манипулятора к соответствующему ограничителю угла в свободной кинематической паре, одновременно другой привод, управляющий перемещением, переводит манипулятор в другую сборку, в которой осуществляют управление положением манипулятора по двум координатам.
| RU 2202465 С2, 20.04.2003 | |||
| DE 10206414 А, 02.10.2002 | |||
| Исполнительный механизм робота | 1990 |
|
SU1722806A1 |
| Исполнительный механизм робота | 1991 |
|
SU1798176A1 |

