код воздуха самопроизвольно возрастает.
По указанному способу измеряют этс приращение рагсхода и воздействуют . на воздушную заслонку таким образом, чтобы в.эзвратить расход воздуха к прежнему значению. Таким образом, за счет компенсации переменных потерь в Системе обеспечивается некоторая стабилизация качества концентрата Cl. Недостатком указанного способа является низкая точность управления и отсутствие экономии расхода воздуха.
Известен способ управления процессом извлечения асбестовых концентратов на пневматичейкой установке, заключающийся в из 1енении положения Крйльев отсасывающего устройства в зависимости от ско{)остй воздуха под крылом и вибрации пневмотранспортной магистрали 2.
Целью изобретения является повыШение точности управления процессом извлечения.
Это достигается тем, что измеряют Положение крыльев отсасывающего устройства и устанавливают расход водуха в пневмотранспортной магистрали в зависимости от измеренного значени
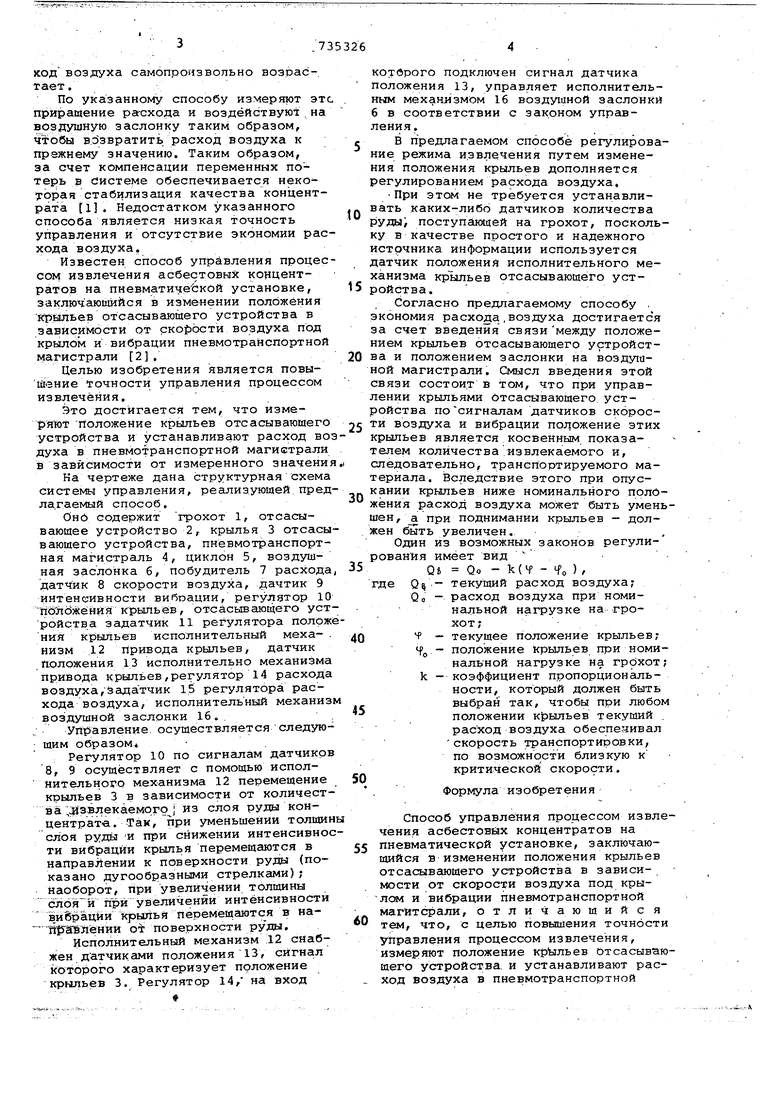
Ка чертеже дана структурная схема системы управления, реализующей предлагаемый способ.
Оно содержит грохот 1, отсасывающее устройство 2, крылья 3 отсасывающего устройства, пневмотранспортная магистраль 4, циклон 5, воздушная заслонка 6, побудитель 7 расхода датчик 8 скорости воздуха, дачтик 9 интенсивности вибрации, регулятор 10 полёжёния крыльев, отсасывающего устройства задатчик 11 регулятора положния крыльев исполнительный меха- . низм 12 привода крыльев, датчик Положения 13 исполнительно механизма привода крыльев,регулятор 14 расхода воздуха,задатчик 15 регулятора расхода воздуха, исполнительный механиз воздушной заслонки 16..
.. Управление, осуществляется следующим образом
Регулятор 10 по сигналам датчиков 8, 9 осуществляет с помощью исполнительного механизма 12 перемещение крыльев 3 в зависимости от количества -извлекаемого из слоя руды концентрате. Так, при уменьшении толщин слоя руды И при снижении интенсивности вибрации крылья перемещаются в направлении к поверхности руды (показано дугообразными стрелками); наоборот, при увеличении толщины при увеличении интенсивности вибрации крыйья перемещаются в на Правлении ОТ поверхности руды.
Исполнительный механизм 12 снабжен датчиками положения 13, сигнал которого характеризует положение крыльев 3. Регулятор 14/ на вход .
которого подключен сигнал датчика положения 13, управляет исполнительным механизмом 16 воздушной заслонки 6 в соответствии с законом управления,
В предлагаемом способе регулирование режима извлечения путем изменения положения крыльев дополняется регулированием расхода воздуха.
-При этом не требуется устанавливать каких-либо датчиков количества руды) поступакядей на грохот, поскольку в качестве простого и надежного источника информации используется датчик положения исполнительного механизма кр лльев отсасывающего устройства.
Согласно предлагаемому способу . экономия расхода.воздуха достигается за счет введения связимежду положением крыльев отсасывающего устройства и положением заслонки на воздушной магистрали. Смысл введения этой связи состоит в том, что при управлении крыльями отсасывающего устройства по сигналам датчиков скорости воздуха и вибрации положение этих крыльев является косвенным показателем количества извлекаемого и, следовательно, транспортируемого материала. Вследствие этого при опускании крыльев ниже номинального положения расход воздуха может быть уменшен, а при поднимании крыльев - должен быть увеличен.
Один из возможных законов регулирования имеет вид
Qi Qo - k(V - -о ) . где Q - текущий расход воздуха; QO - расход воздуха при номинальной нагрузке на грохот;
v текущее положение крыльев; % положение крыльев при номинальной нагрузке на грохот
k коэффициент пропорциональности, который должен быть выбран так, чтобы при любо положении к рыльев текущий расход воздуха обеспечивал скорость транспортировки, по возможности близкую к критической скорости.
Формула изобретения
Способ управления процессом извлечения асбестовйх концентратов на пневматической установке, заключающийся в изменении положения крыльев отсасывсшэщего устройства в зависимости от скорости воздуха под кры-лсм и вибрации пневмотранспортной магйтсрали, отличающийся тем, что, с целью повышения точности управления процессом извлечения, измеряют положение крыльев отсасывающего устройства, и устанавливают расход воздуха в пневмотранспортной
Магистрали в зависимости от измеренного значения.
Источники информации, принятые во внимание при экспертизе
свидетельство СССР 27 Ь 19/00, 1971.
свидетельство СССР 07 В 4/08 1974 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом извлечения асбестовых концентратов на пневматической установке | 1981 |
|
SU988365A1 |
| Устройство для автоматического управления процессом извлечения асбестовых концентратов | 1979 |
|
SU896360A1 |
| Способ управления процессом обработки сыпучих материалов на параллельно работающих аппаратах | 1978 |
|
SU753465A1 |
| Способ управления процессом извлечения асбестовых концентратов | 1974 |
|
SU494201A1 |
| Пылеулавливающая установка для буровых станков | 1981 |
|
SU1068593A1 |
| Способ управления процессом извлечения полезного компонента в концентрат с грохота | 1987 |
|
SU1430119A1 |
| Способ автоматического регулирования классифицирующих аппаратор | 1981 |
|
SU1030021A1 |
| Устройство для автоматического регулирования спиральным классификатором | 1984 |
|
SU1194492A1 |
| Способ автоматического управления технологической цепью обогащения | 1977 |
|
SU735299A1 |
| Устройство для промывки руды в технологических секциях | 1982 |
|
SU1084071A1 |