1 Изобретение относится к автоматйке и вычислительной технике.Оно пре назначается, . в основном, для автомат ческого представления в графической форме результатов вычислений, получаемых в виде числовых таблиц координат электронных цифровых вычислительных машин (ЭЦВМ). Известны графопостроители, с помощью которых по заданным координатам точек Аи В сначала вычерчивается катет АС,параллельный оси х, а потом катет СВ, параллельный оси у. Соответствующие перемещения пишущего узла осуществляются спомощью прецизионных ходовых винтов, .расположенных соЬтветственно параллельно координатным осям X и у. Один из них, вращаемый электродвигателем, приводимым в действие командньм блоком, перемещает каретку, несущую пишущий узел, в направлении х относительно неподвижного планшета. Второй винт, .тоже вращаемый эл.ектродвигатепем по сигналам командного блока перемещает пишу1дий узел в направлении у 1 и К основ.ным недостаткам таких устройств относятся высокие требования к точности и геометрической стабияьности ходозвых винтов, трудности эти возрастают с увеличением длины винта, так как должны соблюдаться строгая прямолинейность, отсутствие зазоров, постоянство шага и т.д. Наиболее близок к предлагаемому графопостроитель, содержащий планшет с зубчатой рейкой каретку по 1соординате х и закрепленными на ней цилиндрическим валом-и шестерней, связанной с зубчатой рейкой планшета, каретку по координате у, установленн5гю с возможностью перемещения относительно цйлиндричёсйого вала каретки по координате х, на каретйе по координате у закреплены пишущий узел и интегрирующее колесо, связанное с тангенсншл механизмом, и шаговые Двигатели, связанные с каретками 3. Недостатком этого графоцостроителя является невозможность построа-г ния линейных элементов под любыми углами к координа тным ося х и у кривые линии, а также прямые, направ-. лёния которых не совпадают с опорными, могут аппроксимироваться только ступенчатыми ломаными, поэтому для достижения визуальной плавности и
Йёпрерывности приходится применять малые шаги квантирования порядка долей миллиметра, что .приводит к высокой за:груз.ке памяти управляющих , ЭЦбм и к большим затратам машинного лемени, кроме того, оказывается необШДймым применение интерполяторов, промежуточной автоматической коррекции и т.п., а, следовательно, происходит усложнение конструкции графопостроителя,
Цель изобретения - расширение области применения графопостроителя за счет построения линейных элементов под любыми углами к координатным осям X и у.
Поставленная цель достигается . эасчёт огб, что в известный графопостроитель введена дополнительная |1рбйёжутечная каретка, связанная с тангенсныммеханизмом и установленная с возможностью перемещения относительно каретки по координате у.
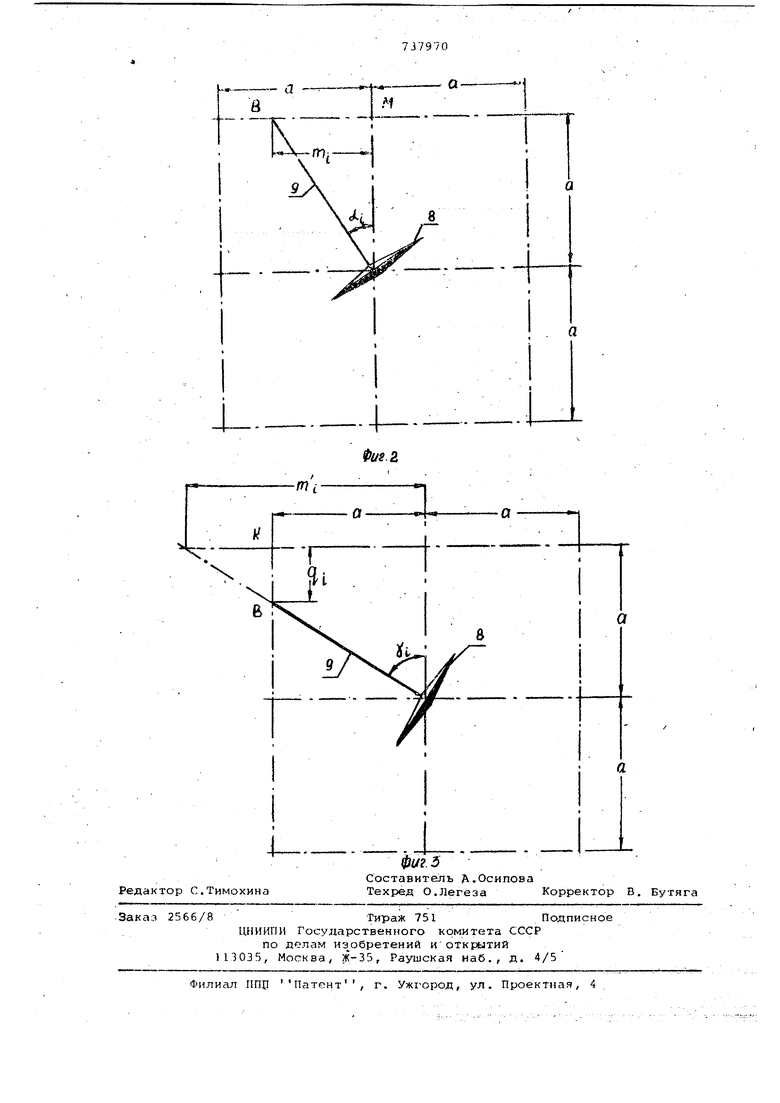
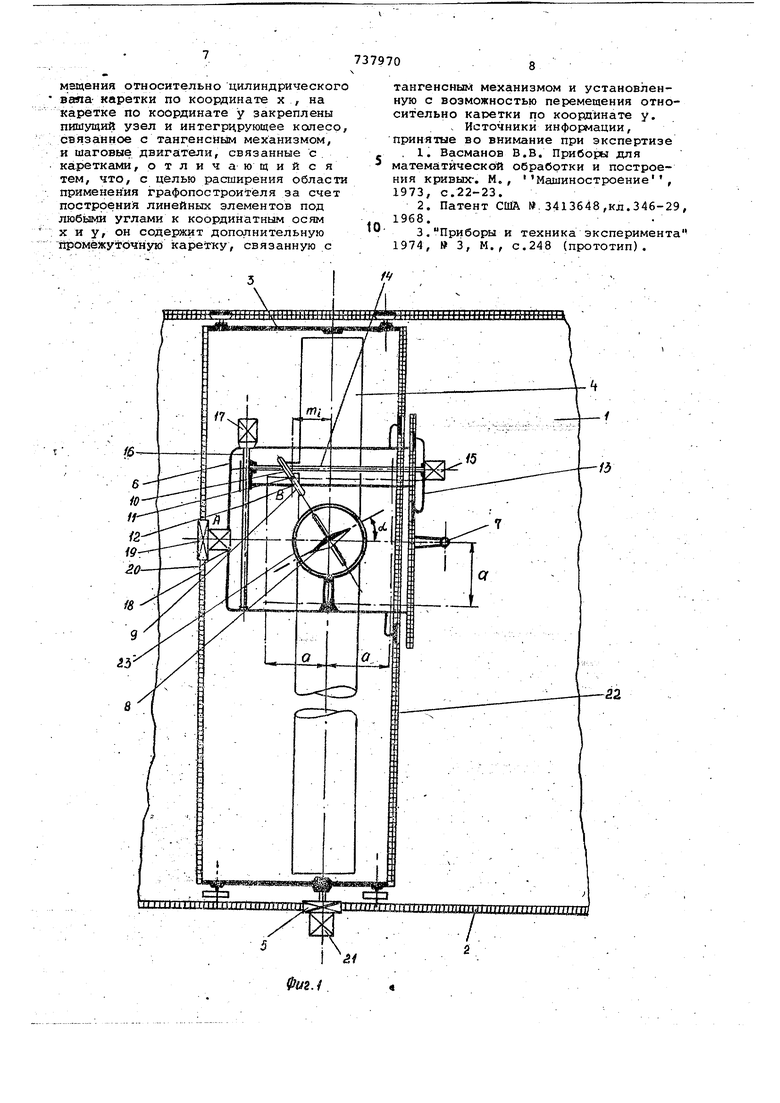
На фиг.1 показана конструктивно ййкематическая схема предлагаемого графопостроителя; на фиг,2 - геометрическая схема действия при tg 1/ на фиг. 3 - то же, при tg сЛ 1.
Графопостроитель содержит планшет
1с зубчатой рейкой 2, каретку 3 по координате к с закрепленными на ней цилиндрическим валом 4, геометрическа1Я ось которого параллельна плоскости планшета и направлению у, и шестерней 5, связанной с зубчатой рейкой
2планшета 1, каретку 6 по координа.те у,установленную .с возможностью
Ш йШёййя -йтносительно црлинДрйческрго вала 4 каретки 3 по сбедайнаТе X, на каретке б по координате у , закреплены пишущий уэел 7 и интегрирующее колесо 8, связанное с тангенсным механизмом, в состав которого входят рычаг 9, кулиса 10 и штифт , И, в рычаге 9 выполнена продольная прорезь 12, вдоль которого может
(йользить штифт 11, жестко прикрепленный к кулисе 10 которая может перемещаться в направлении 1 х относительно дополнительной промежуточной каретки 13 с помо.щью винта 14, вращаемого шаговым двигателем 15. Каретка 13, в свою очередь, может
перемещаться относительно каретки 6 в направлении i у, например с помощью винта 16, вращаемого шаговым двигателем 1-7. .- - i. . - --. / .-- ......
Кроме того, предусмотрена возйвЖйбсть принудительного перемещения каретки 6 относительно каретки .
3с помощью находящейся в зацеплений с зубчатой рейкой 18 шестерни 19, вращаемой, например шаговым двигателем 20. Каретка 3, в свою о еipeftb; Мбжёт принудительно перемещаться относительно планшета I с гтомощью шестерни 5, находящейся в зацеплении с зубчатой рейкой 2 и вращаемой
аговьлм двигателем 21 , Цилиндрический вал смонтировай в подшипниках (на чертеже не показаны). Каретка 6 ожет перемещаться в направлении ± у тносительно каретки 3 и цилиндричест ого вала 4 по направляющему рельсу
22.На каретке б смонтирована обойма
23,несущая ось интегрирующего колеса 8, кромка которого фрикционно взаимодействует с цилиндрической поверхностью/ вала 4.
Действие описанного устройства осндвано на свойстве системы цилиндрический вал 4 -- интегрирующее колесо 8.
Угловое, перемещение вала 4 радиуса г вокруг своей оси на угол р - РО благодаря фрикционному взаимодействию Между его поверхностью и кромкой колеса 8 вызывает линейное перемещение каретки б в направлении у„ равное
Л У У -УО ({i-|3)tgc(,
где D(. - угол между плоскостью кромки
колеса 8 и осью х. При указанной выше системе связи между шестерней 5 и рейкой 2 угловое перемещение .-po вала 4 вызывает пропорциона 1ьное ему линейное пе-ремещениедх г/др каретки 3 (г - радиус шестерни 5) . Следовательно
йу (с г/г.. const)(1)
.
Если же принудительно вызывать линейное перемещение каретки б, то в результате фрикционного взаимодействия между колесом 8 и валом 4 последний повсэрачйваеТСя вокруг своей .оси на величину.
дУ ,
Pr.yci(2)
и cooTBfiTCTBeHHo через шестерню 5 вызнает линейное перемещение каретки 3 на величину
uX-uV/c-tgc ;.)
Соотнесение (3) тождественно соотношению (1) и, следовательно, одна и та же зависимость между величинами л X, ду , tg с принципиально сохраняется независимо от того, является ли Лервичйым {принудительным) перемещение Л х или йу. ..
. Оццакр возможность практической реализа ции каждого из названных слу-. чаев существенно зависит от величины tg ct . Действие по формуле (1) целесообразно при ,, ... (4)
действие по ф01ялуле (2) - при
igrttl -1 (5)
Но в ранее известных конструкциях становка колеса 8 возможна лишь ля значений примерно 2,5. предлагаемой конструкции возможна установка колеса 8 под любыми требу мыми углами « и, следовательно, при любых значениях tg от - со до+со Для этого при всех значениях у. 45 и, значит, 1, промежуточная каретка 13 остается неподвижной в одном,.из крайних положений, т.е. таких, при которых центр штифт 11 удален от абсциссы точки контакт кромки колеса 8 с поверхностью вала 4. на величину . lai const. С помощью шагового двигателя 15 кулиса 10, ас ней и центр штифта 11 , перемещается до положения (фиг.2), определяемого требуемым значением (,/а-1дс. (6) и, таким образом, колесо 8 с помощь рычага 9 устанавливается под требуе мым углом сИ, i . . При достижении-штифтом 11 одного из крайних положений т-, а, угол с, принимает значение luk 45. Для ввода углов с)ч-| 45 , цент шрифта 11 надо перемещать только в направлении 4 у. Это осуществляется перемещением промежуточной каретки например с помощью винта 16, вращае мого шаговым двигателем 17. Точка В в это время остается неподвижной ,относительно каретки 13, перемещаяс вместе с нею. Для установки колеса 8 под углом у. , удовлетворяющим условию tg/jj.--m;/a i/ каретка 13 должна быть перемещена в такое положение, при котором точк В вместе с нею сдвигается в направлении ,у на величину ,,Q-aV как схематически показано на фиг.З. Из формулы (8) следует, что при д-- а указывается т| о . Следовательно, для достижения значения tgis с--) достаточно переместить точк В из начального положения до такого при ко тором j;;. , и, следовательн tg-Xi 00 . Таким образом достигается поставленная цейь возможности установки любого заданного угла наклона колеса 8. , Порядок действия при этом следую щий. Задсцотся или вырабатываются ЭЦВМ последовательные значения величин: X Хд , Х, ....... Х| , f У Уд f У, , у/ , . . . д X; X; +1 - X, ьу- У; +1 - у Д У; /Л ) (л V/u XY, - m. /О Ig- W. npv -:., (. Д5 ГлУ/ДХ)..туа Ь2)(; ПрЦ5$; в начале каждого интервала на двигатель 15 подается значение га; или 1П; . В первом случае, точка В сразу приводится в требуемое положение. После этого включается двига;тель 21,. йеремещающий, каре.тку 3 на величину 4xj .В результате этого перемещения каретка 6 перемещается на величину Ayj - по формуле {), Если С i, то формула (6) имеет вид .&Xj(9) При этом пгааующий узел 7 вычерчивает на планшете I прямолинейный отрезок под углом ел, к оси х, причем проекции его, на координатные оси равны, соответственно/ д У; и & х: . ЕСЛИ же требуется ввести tgf;, то, как в первом случае, подается команда на двигатель 15, который переводит точку В в одно из крайних положений на каретке ).3, После этого автоматически (например, с помощью известного концевого выключателя) двигатель 15 отключается и включается двигатель 17 перемещающий точку В на величину qj по формуле (8) .i После того, как. точка В занимает указанное положение и устанавливается требуемый угол ; , включается шаговый двигатель 2О,перемещающий . каретку 6 на заданную величину ду- . В результате этого ваш 4 пдворачивается вокруг своейоси и, вращая шестерню 5 (при выключенном двигателе 21), перемещает каретку 3 на требуемое расстояние Л xj в соответствии с формулой (3), Если угол 18 тг 90, вьачерчивается вертикальная прямая, если угоя я 0 - горизонтальная пряма я. Таким образом поставленные цели полностью достигаются. Кроме этого, резко снижаются требования к точности ведущих винтов 14 и 16. Пусть, HaripHMisp,, величина а в натуре равна 40 мм, а величина го.-, задается с точностью до i- 0,1 мм, тогда погрешность установки величины tg будет равна 0,,0025 Благопри ятные условия дпя1 уменьшения погрешностей построения создаются еще и тем,- что принудительным (задаваемЕлм) перемещением из двух величин Луи & к всегда является большая по модулю.. Формула изобретения Граф опое трой тел ь, содержащий планшет с зубчатой рейкой, каретку ПО координате х р закрепленными на ней цилиндрическим валом и шестерней, связанной с зубчатой рейкой, гшаншета, каретку по координате у, уста1 овл,енную с возможностью перемащения относительно цилиндрического вала- каретки по координате х , на каретке по координате у закреплены пишущий узел и интегрирующее колесо, связанное с тангенсным механизмом, и шаговые двигатели, связанные с . каретками, отличающийся тем, что, с целью расширения области применения графопостроителя за счет постррени;я линейных элементов под любыми углами к координатным осям X и у, он содержит дополнительную промежуточную каретку, связанную с
тангенсным механизмом и установленную с возможностью перемещения относительно каретки по координате у.
. Источники информации, принятые во внимание при экспертизе
. 1. Васманов В.В. Приборы для математической обработки и построения кривых-. М, , Машиностроение,
1973,с.22-23.
2. Патент США . 3413648,кл.346-29, 1968.
3.Приборы и техника эксперимента
1974, 3, М., с.248 (прототип).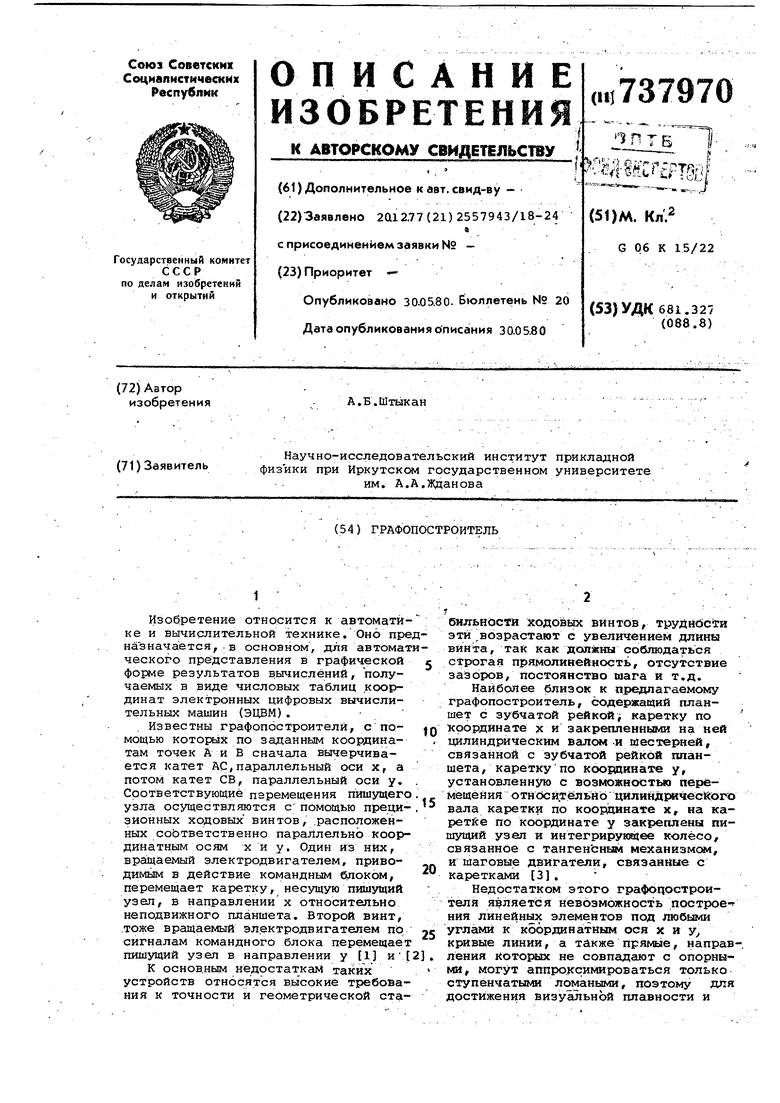
| название | год | авторы | номер документа |
|---|---|---|---|
| Графопостроитель | 1987 |
|
SU1837337A1 |
| Чертежный прибор | 1989 |
|
SU1733273A1 |
| Интегратор | 1938 |
|
SU56663A2 |
| ГРАФОПОСТРОИТЕЛЬ | 1989 |
|
RU2069840C1 |
| Графопостроитель" | 1978 |
|
SU779807A1 |
| Механизм перемещения каретки с пишущим узлом для графопостроителя | 1988 |
|
SU1621064A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ДЕРЖАТЕЛЯ ОБЪЕКТА | 1996 |
|
RU2112260C1 |
| Графопостроитель | 1987 |
|
SU1603194A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ФОТОТРАНСФОРМАТОР | 1973 |
|
SU409070A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |