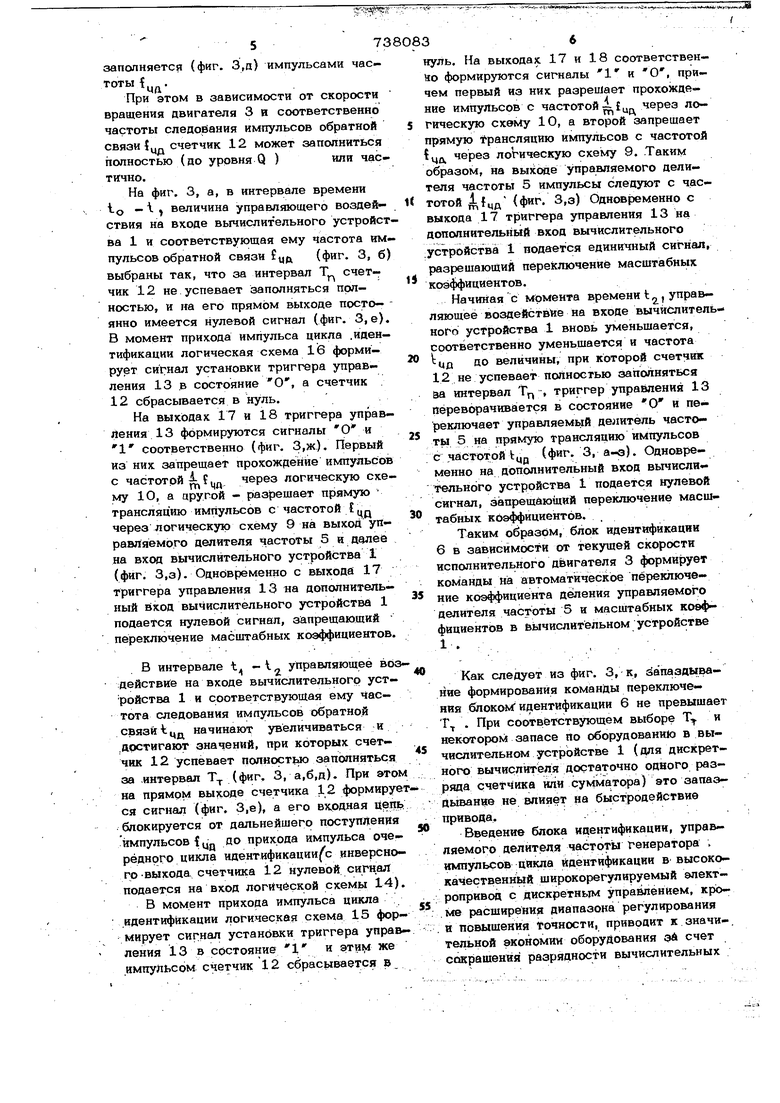
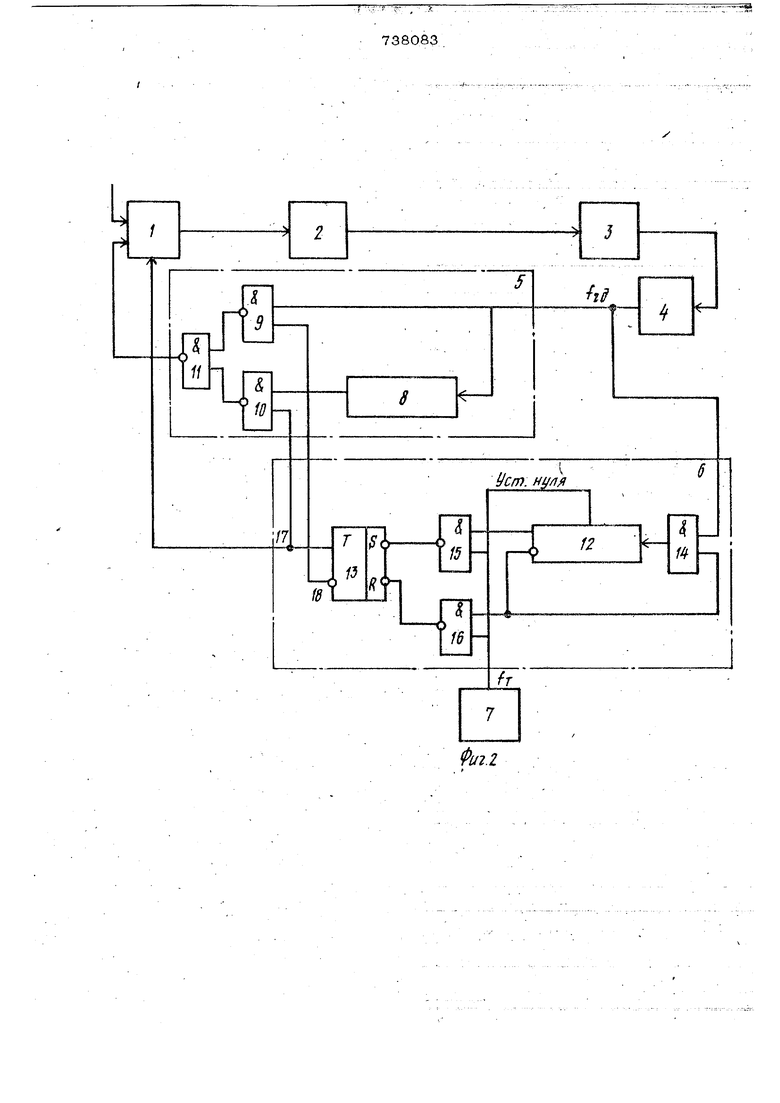
Изобретение относится к электротехнике, в частности, к устройствам с широким диапазоном регулирования скорости электродвигателя. Известен алектроттривод с дискретным управлением содержащий эталонный генератор, блок задания скорости, делитель частоты, блок логики, компараторинтегратор, силовой преобразователь, двигатель и частотный датчик,обратной связи по скорости двигателя. У устройстве сигнал отклонения представляет собой разность периодов следования импульсов задания и обратной связи, при этом частота следования импульсов задания формируется с помощью делителя частоты. Сигнал отклонения поступает на вход компаратора-интеграто-t ра, который формирует сигнал управления силовых преобразователей. Устройство об/шдает следующим недостатком. При увеличении скорости элект родвигателя возрастает частота следования импульсов на выкоде частотного датчкка и, следовательно, уменьшается точность регулирования скорости. Этот недостаток ограничивает применение частотных датчиков с высокой разрешающей способностью для расширения диапазона регулирования скорости. Наиболее близким к изобретению по Технической сущности является электропривод с дискретным управлением 2|, содерзкащий последовательно включенные вычислительное устройство с входами задания скорости и обратной связи по скорости, усилитель мощности и двигатель с частотным датчиком в цепи обратной связи по скорости. в этом электроприводе сигнал обрат- (шй связи формируется в виде периода следования импульсов частотного датчика. Требуемое значение скорости задается в виде ьременного интервала и вводится из задатчика в реверсивный счетчик в параллельном двоичном коде. В реверсивном счетчике формируется отклонение в результате вычитания импульсов эталонНОЙ частоты из кода задания в течение ийтервала времени, равного периоду следования импульсов частотного датчика. По сравнению с устройством Щ электропривод 2 обеспечивает наибольшее быстродействие, однако ему присущи те ike недостатки, т. ё.сййясенйё точности на больших скоростях электропривода и ограниченный диапазон регулирования скорости. Целью изобретения является расширение диапазона и повышение точности регулирования скорости электропривода. Поставленная цель достигается за CHeflbFor что последбвательно в цепь обратной связи элеКтропривода йведе11 управляемый делитель частоты, а также генератор импульсов цикла идентифика,ции и блок идентификации скорости двигателя, входы которого соединены соответственно с выходами генератора импуль сов цикла идентификации и частотного датчика скорости, а выходы - с управляющим входом делителя частоты и дополнительным входом вычислительного, устройства. На фиг. 1 представлена структурная схема электропривода; на фиг. 2 - то же с Тв6эмГдзкнь1М в;ар1иайтом реализации управ ляемого делителя частоты и блока идеитификации; на фиг. 3 - диаграмма работы Электропривода. Электропривод (фиг. 1) содержит соединенные последовательно вь1числительное устройство 1, усилитель мощности 2, дви гатель 3 и частотный датчик 4. К выходу частотного датчика 4 своими входами присоединены управляемый Делитель частоты 5 и блок идентификации скорости 6 Другой вход блока идентификации 6 при- соединён к выходу генератора импульсов цикла идентификации 7, а выходы блока . идентификации соединены с дополнитель- йЬ1М входом вычислительного устройства 1 и управляющим входом делителя частог ты 5. Выход делителя частоты 5 соединен со входом обратной связи вычислительного устройства 1. В свою очередь, управляемый дели- , тель частоты 5 содержит счётчиК импуль сов 8, логические схемы И 9-11. Выход чйстотноГо датчика 4 подключён соответ ственно ко входам логической схемы 9 и счетчика импульсов 8. Вытсод счетчика импульсов 8 соёдйН1ен со входом логичес кой схемы 10, а выходы логических схем 9 и 1б с боотгветствуйщими входами логической схемы 11. Выход логической
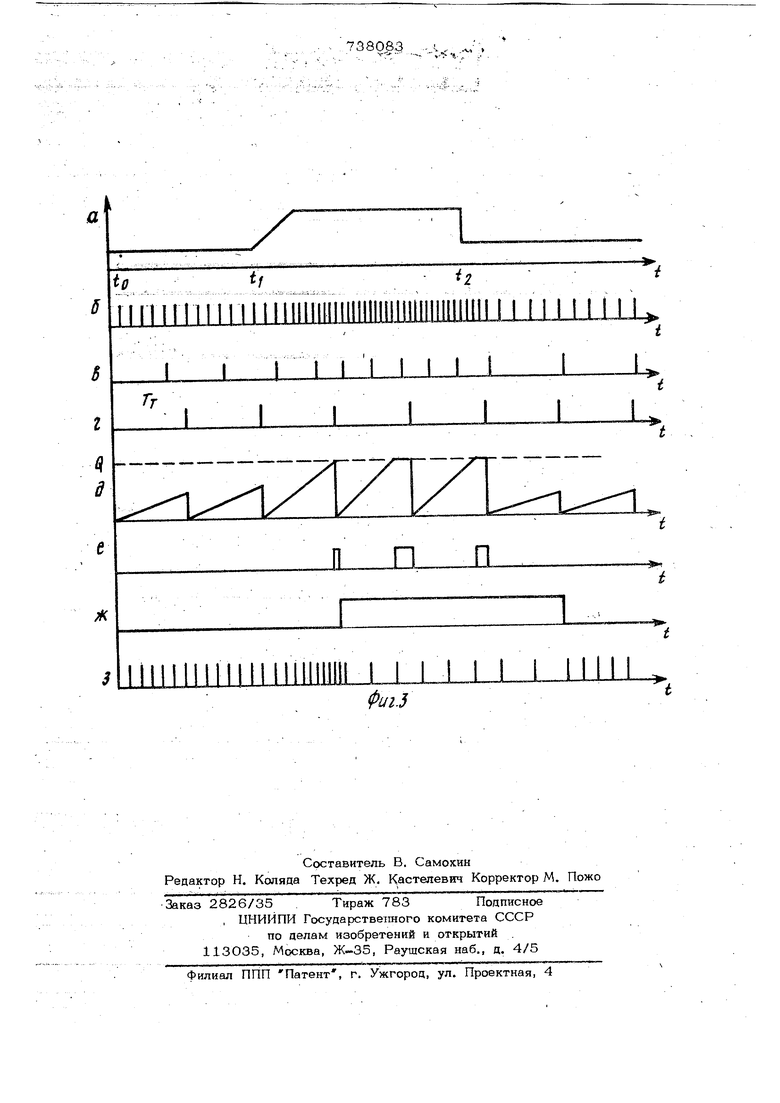
738083 Схемы 11 присоединен ко входу обратной связи вычислительного устройства 1. Счетчик импульсов 8 осуществляет деление частоты (дд , поступающей и.з частотного датчика 4, в m раз. Управление логическими схемами 9 и 10 осуществляется сигналами, поступающими от блока идентификации скорости 6. Блок идентификации скорости 6 (фиг. 2) состоит из счетчика 12, триггера управления 13, логических схем И 14-16. Им- пульсы с выхода частотного датчика 4 поступают на вход логической схемы 14, другой вход которой соединен с инверсным выходом счетчика 12. Выход логической схемы 14 соединен со счетным входом счетчика 12, прямой и инверсный вь1ходы которого Соединены с соответствующими входами логических схем 15 и 16. Другие входы схем 15 и 16 соединены с выходом генератора 7. С этим выходом генератора 7 соединен также вход Установка нуля счетчика 12. Выходы логических схем 15 и 16 соответственно подключены К установочным входам триггера управления 13. .. Выходы 17 и 18 триггера управления 13 соединена соответственно йо входами логических схем 10 и 9 управляемого делителя частоты. Кроме того, выход 17 соединён с дополнительным входом вычислительного устройства 1. Электропривод работает следующим образом. На вход вычислительного устройства 1 в момент времени о( фиг.3,а) подают постоянное управляющее воздействие, соответствующее заданной скорости. При этом электродвигатель 3 вращается с постоянной скоростью, а на вь1ходе частотного датчика 4 формируется последовательность импульсов постоянной часто ты ц-. (фиг. 3, б). Эти импульсы поступают npsiMo на вход логической схемы .И 9 управляющего делителя частоты. 5, а Hsi выход логической схемы И 10 импульсы поступают с частотой (фиг. 3, в) после деления в счетчике импульсов 8. Однсжременно последовательность импульсов с частотой {цц через логическую схему 14 поступает на вход счетчика 12 блока идентификации 6. Цикл работы счетчшса 12 определяется частотой { п тактового генератора (фиг. 3, г). В момент прихода тактовых импульсов; счетчи : 12 устанавливается в нуль, а в течение интервала . заполняется (фиг. 3,п) импульсами частоты ц. При этом в зависимости от скорости вращения двигателя 3 и соответственно частоты следобания импульсов обратной связиiц счетчик 12 может заполниться полностью (до уровня Q )или часНа фиг, 3, а, в интервале времени IQ - величина управляющего воздайствия на входе вычислительного устройст ва 1 и соответствующая ему частота им пульсов обратной связи уд (фиг. 3, б) выбраны так, что за интервал Т, счетчик 12 не успевает заполняться полностью, и на его прямом выходе посто- янно имеется нулевой сигнал (фиг. 3, е). В момент прихода импульса цикла .идентификации логическая схема 16 формирует сигнал установки триггера управления 13 в состояние О, а счетчик 12 сбрасывается в нуль. На выходах 17 и 18 триггера управления 13 формируются сигналы О и 1 соответственно (фиг. 3,ж). Первый из них запрещает прохождение импульсов с частотой i f д через логическую схему 10, а цругой - р1азрешает прямую трансляцию импульсов с частотой „., через логическую схему 9 на выход управляемого целителя частоты 5 и дадее на вход вычислительного устройства 1 (фиг. 3,з). Одновременно с выходе 17 триггера управления 13 яа дополнительный вход вычислительного устройства 1 подается нулевой сигнал, запрещающий переключение масщтабных коэффициентов. В интервале t - 2 управляющее воз действие на входе вычислительного устройства 1 и соответствующая ему частота следования импульсов обратной связи :цд начинают увеличиваться и достигают значений, при которых счетчик 12 успевает полностьао заполняться за .интервал Т (фиг. 3, а,б,д). При этом на прямом выходе счетчика 12 формируе ся сигнал (фиг. 3,е), а его входная цепь блокируется от дальнейшего поступления импульсов {цц до прихода импульса очерёдного цикла идентификации с инверсного -выхода счетчика 12 нулевой сигн,ал подается на вход логической схемы 14). В момент прихода импульса цикла идентификации логическая схема 15 формирует сигнал установки триггера управления 13 в ссэстояние 1 и же импуйьсом счетчик; 12 сбрасывается в
738O83 нуль. На выходах 17 и 18 соответственно формируются сигналы и О, причем первый из них разрешает прохождение импульсов с частотой ц через логическую схему 10, а второй запрещает прямую рансляцию импульсов с частотой 40. через логическую схему 9. .Таким образом, на выходе управляемого делителя частоты 5 импульсы следуют с частотой фиг . 3,з) Одновременно с выхода 17 триггера управления 13 на дополнительный вход вычислительного устройства 1 подается единичный сигнал, разрешающий переключение масштабных коэффициентов. Начиная с момента времени t , управляющее воздействие на входе вычислительного устройства 1 вновь уменьшается, соответственно уменьшается и частота ид до величины, при которой счетчик 12 не успевает полностью заполняться ва интервал Т , триггер управления 13 переворачивается в состояние О и переключает управляемый делитель частоты 5 на прямую трансляцию импульсов с частотой i:цд (фиг. 3, а-а). Одновременно на дополнительный вход вычислительного устройства 1 подается нулевой сигнал, запрещающий переключение масштабных коэффициентов. Таким образом, блок идентификации 6 в зависимости от текущей скорости исполнительного двигателя 3 формирует команды на автоматическое переключение коэффициента деления управляемого делителя частоты 5 и масштабных коэффициентов в вычислительном устройстве .1;. , . Как следует из фиг. 3, к, йапаадывание формирования команды переключения блоком и)1ентификации 6 не превышает Т,. . При соответствующем выборе Т. и некотором запасе по оборудованию в вычислительном устройстве 1 (ф1я дискретногч вычислителя достаточно одного разряда счетчика или сумматора) это запаздывание не влияет на быстродействие привода.. Введение блока идентификации, управляемого делитедя частоты генератора ; импульсов цикла идентификации в высококачественный широкорегулируемый электропривод с дискретным управлением, кроме расширения диапазона регулирования и повышения to4HOCTH, приводит к значи-. тельной экономии оборудования эА счет сокращения разрядности вычислительных устройств (счетчиков, регистров, сумматоров, блоков памяти и Tia,). ; Формула изобретения Электропривой с дискретным управлением, сЪдержаздий пс следоватеяьно включённые вычислительное устройство с входами заданий скорости и обратной связи по екбрости, усилитель мощности и двигатель с частотным датчиком в цепи обратной СВЯЗИ по скорости, о т л и ч а ю щ и и с я тем, что, с целью расширения диапазона и повышения точности регу лирования скорости вяектропривода, по8следовательно в цепь обратной связи введен управляемый целитель частоты генератора импульсов цикла идентификации и блок идентификации скорости, двигателя, входы которого соединены соответственно с выходами генераторов импульсов цикла идентификации и частотного датчика скорости, а выходы - с упрайляющим входом делителя частоты и дополнительным входом вычислительного устройства. Источники информации, принятые во внимание при экспертизе 1.Патент США № 38О2188, КЛ.-318 - 318, 1974. 2.Заявка Великобритании №1432674; кл. Н 02 Р 5/06, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-фазовый дискриминатор | 2018 |
|
RU2695986C1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
| Устройство для измерения скольжения асинхронных электродвигателей | 1986 |
|
SU1345121A1 |
| Дозирующая система сельскохозяйственной распределительной машины | 1988 |
|
SU1655325A1 |
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Цифровой электропривод | 1982 |
|
SU1053250A1 |
tf
to
lliniTllllillllllllllllllllllllllllllllllllllllllll Mill M
11 Il I I I I
в
2
П П
л
fej
