Изобретение относится к области сельскохозяйственного машиностроения, в частности к гидросистемам сельско-хозяйственных уборочных машин.
.Известна гидросистема свеклоуборочного комбайна, включающая гидросистему подъема рабочих органе, следящую систему автоматического управления с магистрал51ми ручной коррекции, состоящую из к опир-водителей, гидроцилиндра и гидрораспределителя, сливная полость кото-рого |ерез обратные клапаны соединена с гидроцилиндром подъема рабочих органов и гидроцилиндром следящей системы ,1 .
Недостатком известной гидроснотэлы является то, что перед операцией ручной коррекции рабочих органе® вдоль рядков растений необходимо произвести операцию аоаьема рабочих органов, что осуществляется разными секциями гидрораспределителя раздельно-агрегатной гидросистемы (РАГ) трактора. В противном случае возможны полсмки рабочих органов и коЬсироводителей, находящихся в опущенном положении и смещаемых в поперечном направлении по отношению к рядкам растений.
Кроме того, в известной гидросистеме затруднена ручная коррекция рабочих органов во время движения в рядках, так. как оператор вынужден воздействовать в определенной последовательности на рукоятки двух секций гщфораспределитвлв
10 РАГ трактора, что удлиняет процесс регулирования и, следовательно, ухудшает качество выполнения работ.
Цепь изобретения - исключение попомок рабочих органов при ручной коррек15ции и упрощение управления комбайном.
Это достигается тем, что магистрали ручной коррекции и подъема рабочих органов соединены посредством клапана ИЛИ , входы которого соединены с магистраля20ми ручнсА коррекони, а выход соединен с магистралью подъема рабочих органов.
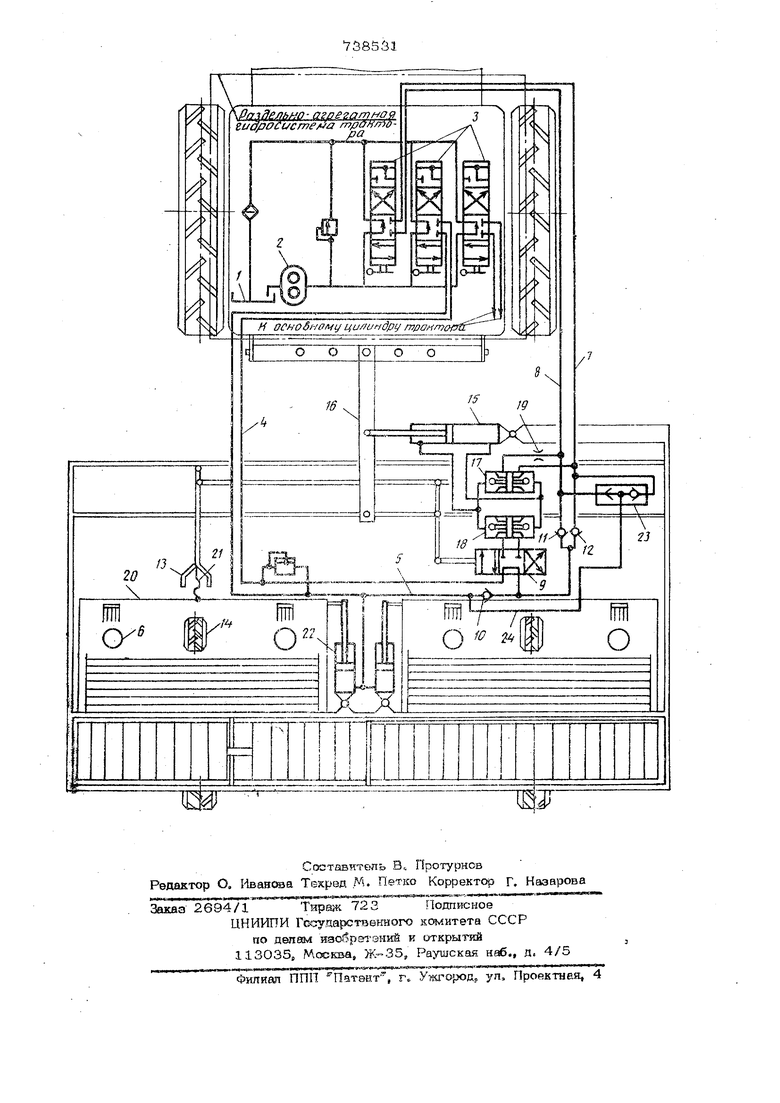
На чертеже изображена схема гидрсхснстюигы свеклоуборочного . Источником питания гидросистемы свеклоуборочного ксчлбайна является РАГ трактора, которая содержит бак 1, наоос 2 и четырехпозиционный трвхсэкцион ный гидрораспредепнтепь 3, Гвдросистем комбайна объединена с РАГ при помощи напорной магистрали 4, магистрали 5 подъема рабочих органов б и магистрапей ручной коррекции 7 и 8. По напорной магистрали 4 при одном из принудительных положений секшш fi гидрорбюпре делителя 3 осуществляется подача рабо чей жидкости к гидрораспределителю 9 слешзщей системы автоматического управ ления по рядкам. Спив из гид pop ас преде- лителя 9 осуществляется через обратные клапаны 10, 11 и 12 по магистралям 5j 7 и 8 при положении рукоятки сек-/ НИИ Т гидрораспределителя 3 Ппавающее Золотник гидрораспределителя 9 спе дящей системы через рычажный механизм связан с копир-водителем 13, которые9 как и опорные колеса 14, перемещаются в углублениях междурядий. Исполнительным механизмом следашей системы автоматического управления является гтшроципиндр 15, ктшематическ CE язaнный с рамой и дьпллом 16 прицепной машины, а гидрешлически - через гидрозамки 17 и 18 с гидрораспределител л 9 и магистралями ручной коррекцин 7 и 8. В отводе, связывающем магистраль 8 и гидрозамок 17, установлен дроссель 19. Подъем подвижных 20, на кото рых смонтированы рабочие органы 6 и опорные колеса 14 и которые гибкой связью 21 соединены с копир-водителем 13, осуществляется с помощью . ронних гидроцилиндров 22, подключенных X магистрали 5. Магистрали ручной коррекции 7 и 8 с псяиощъю отводов связаны с выходами клапана ИЛИ 2з, Выход клапана ИЛИ отводом 24 соединен с магистралью ,5 подъема рабочих органов. Гидросистема свеклоуборочного агрегата работает следующим образом. Для опускания подвижных рамок 2 О, с ними рабочих органов Q, опорных колес 14 и кОпир водителей 13 в исходное положение рукоятка секции Т гидрораспре делителя 3 переводится в попожение Пп вающее. При этсм под действием силы веса рабочая жидкость вытесняется из надштоковых полостей гидродитгадров 22 в бак 1 через магистраль 5, отвод 24, один из входов клапана одну из 7 14 магистралей ручной коррекции 7 или 8 В зависимости от того, к седлу клапана ИЛИ оказывается прижат его {Зсли после опускания оказывается, что рабочие органы 6 смешены относительно рядков растений, то оператор переводит рукоятку той же секции Т в одно из принудительных положений: рабочая жидкость под давлением подается в одну из магистралей ручной коррекции, например в магистраль 8. Отверстие в дросселе 19 выбрано таким образом, что гидравлическое сопротивление цепи, связывающей гидроиилиндр 15 следящей системы с магистралями ручной коррекции больше, чем сопротивление в Цепи: клапан ИЛИ - отвод 24 - магистраль подъема 5 - гидроцилиндр ,22, Шар клапана ИЛИ , прижатый давле ием к правому седлу, препятствует прямому сливу рабочей жидкости из магистрали 8 в магистраль 7, Поэтому первоначально происходит подъем подвижных рамок гидроцилиндрами 22 и только после того когда опорные колеса 14 и копир-водители оказываются поднятыми над землей (и их поперечному пэремещению ничто не препятствует), давление в магистрали 8 возрастает настолько, что гидроцилиндр 15 начинает смешать раму всей машины Б нужную сторону от1 осительно дьшгла 16. При необходимости произвести коррек цию в обратном направлении рукоятка секции 1 переводится в другое принудительное положение. В результате чего давлением в магистрали 7 шар клапана ИЛИ прижимается к левому седлу, рабочие фганы продолжают находиться в поднятом положении, а гидррцилиндр 15 медленно перемещает раму машины до совмещения рабочих органов и рядков растений. После этого оператор переводит рукоятку той же секции Т гидрораспреде- лителя 3 в положение Плавающее (кор рекция прекращается и рабочие органы опускаются в исходное положение), а рукоятку секции Т - в принудительное полон ение. При этсад обеспечивается питание по напорной магистрали 4 и слив рабочей жидкости по магистралям 5, 7 и 8 гидрораспределитепя 9 гидрсмеханической следящей систа 4ы. Гидросистема готова для работы агрегата в рядках. Если во движения в рябках оказьшается необходимьм произвести коорвхцию траектории рабочих органов 5v Гнапример, при посевах) оператор переводит рукоятку секции J в нейтральное попожение и не останавливая трактора, рукояткой секции Т гидрораспределитепа производит коррекцию в нужную сторону, так как это было описано вьппе для -неподвижного агрегата. При этом автоматически рабочие органы 6, опорные колеса 14 и копир-водители 13 приподнимаются, что исключает их поломки и упро щает процесс управления. Таким образом, соединение магистралей ручной коррекции и магистрали подъема рабочих органов посредством клапана ИЛИ позволяет повысить эксплуатадион- ную надежность свеклоуборочного комбайна, так как при этом искточаются поломки опорных колес, копир-водителей и рабочих органов при соударениях с корнями свеклы и неровностями почвы во время боковых перемещений рамы в процессе ручной коррекции. Кроме того, возможность осуществлять опускание рабочих органов, ручную коррек цию их подъем при помощи одной и той же рукоятки гидрораспредепителя трактора упрощает процесс управления, что так же благоприятно сказьшается на ка- i честве выполнения технологического процесса уборки. Формула взобретвняа Гидросистала свеклоуборочного комбайна, включающая гидросист «{у подъема рабочих органе® спедяп ю систему автома-, тического управления с магистралями ручной коррекции, состоащую из копирводителей, гидроиипиндра и гидрораспредвлителз, сливная полость которого череэ обратные клапаны соединена с гидроцилиндром подъема рабочих органов н гидроцилнндром следщцей систга ц, о т лич ающаяся тем, что, с депыо исключения полсмок рабочих органов ори ручной коррекции и упрощения управления комбайном, магистрали ручной коррекции ti подъема рабочих органов соединены посредством клапана ИЛИ , входы кото- jDoro соединены с магистралями ручной коррекции, а выход соединен с магистралью подъема рабочих органов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2383270/30-15, кл. А 01 В 63/1Q, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема свеклоуборочного комбайна | 1983 |
|
SU1119619A2 |
| Гидросистема свеклоуборочного комбайна | 1977 |
|
SU759060A1 |
| Гидросистема свеклоуборочного комбайна | 1976 |
|
SU655351A2 |
| Гидравлическая система к погрузчикуКОРНЕплОдОВ | 1979 |
|
SU803890A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 1991 |
|
RU2065260C1 |
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1981 |
|
SU952122A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| СИСТЕМА ТРАНСПОРТЕРОВ МНОГОРЯДНОЙ СВЕКЛОУБОРОЧНОЙ МАШИНЫ И ГИДРОПРИВОД ИХ ПОДЪЕМА-ОПУСКАНИЯ | 2010 |
|
RU2443096C1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1989 |
|
SU1635918A1 |