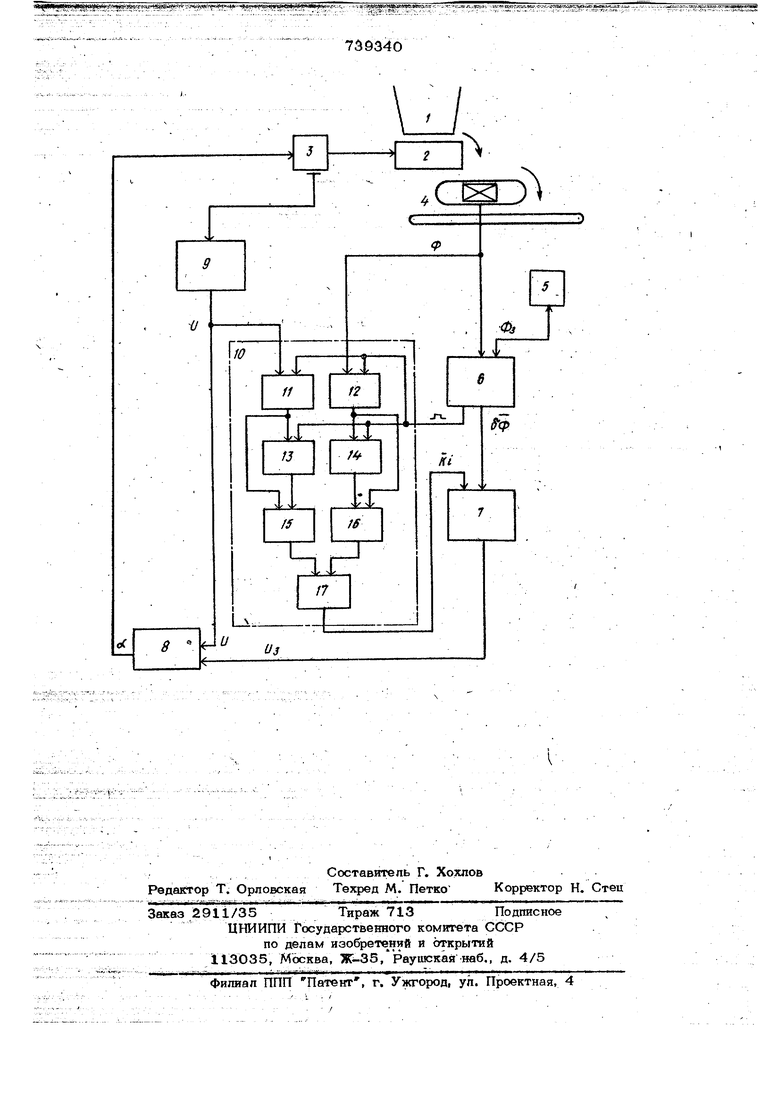
. : Изобретение относится к устройствам для весового дозирования, предназначенным для управления процессом составления металлургических шихт в условиях агломерационных фабрик, например, непрерывного дозирования расхода одного (ведомого) компонента в заданном сротношении с расходом другого (задающего) компонента. Известное устройство для автоматического дозирования путем дозирования ведомого кок понента а заданном соотношешга с усредненным расходом задающего компонента с учетом физически: свойств дозируемых материалов позволяет уменьшить динамическую погрешность процесса 1 . Однако это устройство не предусматривает компенсацию динамических погрешностей дозирования, обусловленных дрейфом стаггических характеристик питателей компонентов шихты. Между тем неизбежные в промышленньтх условиях колебания гранулометрического состава дозируемых материалов, их влажности, степени .заполнения бункеров и других факторов приводят к значительному дрейфу статических характеристик (в том числе, к переходу рабочей точки из линейной в существенно нелинейную область, друзь-, трёисратному изменению коэффициента передачи в рабочей области и т.п.). По технической сущности наиболее близким к предложенному является устройство |2 , содержащее бункер, питатель, блок усреднения ошибки дозирования, соединенный с блоком задания и датчиком расхода, регулятор, соединенный с регулирукшим органом питателя. Устройство не обеспечивает высокой точности дозирования. Цель изобретения - повышение точности дозирования. Поставленная цель достигается тем, что предложенное устройство содержит датчик управлякзщего воздействия, блок вычисления управляк)щего воздействия и 5лок определения среднего коэффициента передачи питателя, включающий усредвгь тели расхода и управляющего воздействия, элементы памяти, элементы ojipeiiie лэния приращения расхода и управляющего воздействия и делитель. Входы усреднитере управляющего воздействия и ра:;хода соединены с выходами соответствующих датчиков, а выходы усреднителей подключены к входам элементов памяти и эле.ментов определения приращения соответственно управляющего воздействия и расхода Выходы элементов определения приращения подключены к входам делителя:, выходом соединенж)го с одним из входов блока вычисления управляющего воздействия, ко входу которого подключен выход блока усреднения; ошибки дозирования. Вхо ды регулятора соединены с выходами датчика управляющего возде йтвия и блока вычисления управляющего воздействия, а второй выход блока усреднения ошибки до зирования соединен с входами усреднителей и элементов памярги блока определения коэффиютента передачи. На чертеже показана структурная схем предлагаемого устройства. Устройство состоит из бункера 1 дозируемого материала, питателя 2 с регулирующим органом 3, датчика 4 расхода,, задатчика 5, блока 6 усреднения ошибки дозирования, блока 7 вычисления управляющего воздействия, регулятора 8, датчика 9 управлякядего воздействия, блока 10 определения среднего коэффициента передачи питателя, включающего усреднители 11, 12 управлякацего воздействия и расхода, элементы памяти 13. 14, элементы 15, 16 определения приращения соответственно управляющего воздействия и расхо да, а также делитель 17. Питатель 2 входом соединен с регулирующим органом 3, вход которого связан с регулятором 8, а выход регулирующего органа соедрнен Через датчик 9 управляющего воздействия с блоком Ю определения среднего коэффициента передачи питателя. Датчик 4 расхода выходом соединен с входом блока 6 усреднения ошибки дотирования, второй вход которого связан с задатчиком 5, устанавливающим значение расхода. Блок 6 усреднения ошибки дозксования выходом соединен с блоком 7 вычисления управляющего воздействия, связанным с регулятором 8. Один из входов регулятора 8 связан с датчиком 9 управляющего воздействия. Усреднители 11, 12 управляющего возействия и расхода выходами связаны с лементами памяти 13 и 14, которые чеез элементы 15, 16 определения прира ения соответственно управляющего возействия и расхода связаны с делитеем 17. Устройство работает следующим обраом. Расход компонентов агломерационной шихты, дозируемый из бункера 1 в питат пь 2,. измеряется датчиком 4 расхода. Результаты измерения в блоке б усреднения ошибки дозирования сравниваются с заданным значением расхода Ф , устанавливаемым задатчиком 5 (вручную или автоматически, в зависимости от расхода других компонентов, заданного состава щихты и фактического состава дозир5гемых компонентов). В этом же блоке 6 результат сравнения - ошибка дозирования%--ФФ5 усредняется, так что сигнал на выходе блока 6, соединенного с блоком 7 вычисления управляющего воздействия, .равен причем интервал усреднения Т .устанавливается с помощью узла коммутации, который входит в состав блока 6. В то же время усреднитель расхода 12 блока Ю определяет усредненные значенияiTФОТ) (-1)Т ) -ый интервал усреднения сигнал на выходе усреднителя равен Ф(н)т,х;фаъ,(4) а сигнал на выходе элемента 14 памяти ),(5) . (-5)Т Эти сигналы сравниваются в элемен-. те 16 определения приращения расхода, выходной сигнал которой на рассматриваемом 1 -м интервале усреднения {при ( i -1) ) АФ.)(1-2)Т,(в) Текзтцее значение управляющего воз.ействия на производительность питателя 573 (ток возбуждения вибрспитатепя, скорост вращения тарели или движения ленты, положение регулирующего шибера и т.п. (из меряются датчиком 9 управлякяцего воздействия, усредняются усреднением Ни запоминаются элементом 13, Приращение управлякмцего воздействия определяет эле мент 15, Аналогично уравнениям (4,5,6) сигналы на выходе усреднителя И, элемента 13 памяти и элемента iS на -м интервале усреднения соответственно равны:)T Jr|uoiT, uC(H-2)T.f UdT.V (8) ))(9) В моменты времени t iT по команде, поступающей на усреднители 11 и 12 и элементы 13 и 14 от узла коммутации бпсжа 6, определяются результаты усреднения за -i -и интервал, после чего выход1але сигналы рассмотренных устройств изменяются, оставаясь затем постоянными до t ( i 1 )Т . Новые значения сигналов также определяются формулами (4-9), если заменит в этих формулах 1 на (1 +1). Делилгель и определяет среднее за поспедний оконченный интервал усреднени значение коэффициента передачи питателя - ЛФ,., r-uD-(10) Блок 7 вычисления управляющего воздействия определяет, на какую величину Нужно изменить управляющее воздействие чтобы скомпенсировать ошибку дозирова-ния dq) , определенную блоком 6, при текущем значении коэффигщента передачи, определяемом блоком 10 ЛПЛ и - - I И соответственно требуемое значение управл5 кяцего воздействия .и,-и.ди , (,2) где Up - предЬшущее значение управляющего воздействия. Регулятор 8, сравнивая: требуемое и фактическое значения управляющего воздействия, управляет регулирующим орга-, ном 3 так, чтобы обеспечить 0 Как показали исследования, в условиях т ломерирующего обжига высокосернистых никелевых концентратов коэффициент передачи питаталей возврата колеблется от 20 до 60 т/ч/А. Дозирование возврата без учета этих колебаний приводит к динамическим ошибкам со средним значением 180 т/ч, что, и свсчо очередь, обуславливает дополнительную погрешность поддержания заданного содержания серы в шихте порядка +2% абс. (при номинальном значении 17%.). Использование предлагаемого устройства позволит ликвидировать указанные погрешности. формула изобретения Устройство для весового дозирования, содержащее бункер, питатель, блок yCpefH нення ошибки дозирования, соё диненный с блоком задания и датчиком расхода, регулятор соединенный с регулирующим органом питателя, отличающеес я тем, что, с цепью повышения точности, оно снабжено датчиком управляющего воздействия, блоком вычисления управлякадего воздействия и блоком определения среднего коэффициента перадачи питателя, включающим усреднители расхода и управляющего воадейС1Вия, элементы памяти, элементы определения приращения расхода и управляющего воздействия и депитейь, причем входы усреднителей управЛ5йощего воздействия и расхода соединены с выходами соответствующих датчиков, а выходьт данных усреднителей подключены к входам элементов памяти и элементов определения приращения соответственно управляющего воздействия и расхода, выходы элементов определения приращения подключены к входам делителя, выход которого соединен с одним из входов блока вычисления управляющего воздействия, ко второму входу которого под кгаочен первый выход блока усреднения ошибки дозирования, входы регулятора соединены с выходами датчика управляющего воздействия блока вычисления управляющего возействия, а второй выход блока усреднеия ошибки дозирования соединен с вхо-. ами усреднителей и элементов памяти лока определения коэффициента передачи. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 9 254142, .кл. G 01G Ц/ОО, 1969. 2.Авторское свидетельство СССР 435585, кл. G О1 G ll/OO, 1974 прототип).
739340

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для весового дозированияКОМпОНЕНТОВ шиХТы | 1978 |
|
SU811078A1 |
| Способ весового дозирования сы-пучЕгО МАТЕРиАлА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU802806A1 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1265486A1 |
| Устройство для автоматического весового дозирования компонентов шихты | 1985 |
|
SU1260924A1 |
| СИСТЕМА УПРАВЛЕНИЯ УСРЕДНЕНИЕМ СЫПУЧИХ КОМПОНЕНТОВ | 2007 |
|
RU2353964C1 |
| Дозатор непрерывного действия | 1985 |
|
SU1278598A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1236320A1 |
| Весовой дозатор непрерывного действия | 1986 |
|
SU1339410A2 |
| Дозатор непрерывного действия | 1987 |
|
SU1506286A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294237C2 |