Изобретение относится к городскому и железнодорожному транспорту, в частности к устройствам защиты подвижного состава с асинхронными тяговыми двигателями, питаемыми от полупроводниковых преобразователей частоты и напряжения, от режимов юза и буксования.
Известен способ управления двигателями (авт. св. СССР N 1638789, кл. H 02 P 7/68, заявка N 4684652/07, 1989), согласно которому отслеживают величину углового перемещения вала электродвигателя и величину углового перемещения нагрузки за тоже время. В случае проскальзывания соединительной муфты на валу какого-либо из электродвигателей или нескольких сразу фиксируют превышение углового перемещения вала электродвигателя над угловым перемещением нагрузки и с его помощью снимают управляющие импульсы с соответствующей системы управления тиристорного преобразователя.
Это позволяет оперативно снимать напряжение питания с электродвигателя с дефектной муфтой.
Недостатками этого способа являются, во-первых, необходимость измерения линейной скорости перемещения подвижной единицы, и, во-вторых, влияние на электропривод при неисправностях самого датчика вращения одного из электродвигателей.
Более близким к предлагаемому техническому решению является способ управления асинхронными электродвигателями (фиг.1) [1] в котором в процессе работы измеряют число оборотов по крайней мере двух электродвигателей и в соответствии с усредненным числом оборотов регулируют частоту и выходное напряжение инвертора.
Известное устройство (фиг.2), осуществляющее указанный способ управления (авт. св. СССР N 740551, кл. B 60 L 9/16,1980), в котором на валу каждого асинхронного электродвигателя 2 установлен датчик 1 частоты вращения, выход каждого из них подключен к многовходному сумматору 4, соединенному с генератором 3 абсолютного скольжения. А выход сумматора 4 через делитель частоты 5 и узел 6 распределения импульсов подключен к системе управления 7 преобразовательной установкой 8.
В результате фактическая частота вращения ротора отдельного двигателя формируется как средняя из частот вращения всех двигателей
N число двигателей электропривода;
Fвр.i частота вращения ротора i-ого электродвигателя.
Однако такие способ и устройство управления электродвигателями подвижного состава не позволяют исключить влияние на величину формируемой фактической частоты вращения двигателей буксующей колесной пары (Fбокс≥Fномин) или находящейся в состоянии юза (Fюз≅Fномин). Аналогичные процессы происходят в случае неисправности какого-либо из датчиков частоты.
Техническая задача состоит в определении буксующей (или "юзящей") оси и ликвидации режимов буксования (или юза).
Данную задачу предлагается решить способом, основанным на измерении частот вращения n двигателей с последующим формированием среднего их значения, посредством которого управляют преобразовательной установкой, согласно которому при числе асинхронных двигателей n≥3 сначала сигналы, пропорциональные частотам вращения каждой пары двигателей, сравнивают между собой и выявляют большую и меньшую частоты вращения. При этом при n нечетном сигнал, пропорциональный частоте вращения непарного двигателя, предварительно повторяют. Затем попарно сравнивают между собой отдельно большие и отдельно меньшие из выделенных сигналов и выделяют последовательно из каждой пары больших частот вращение меньшие, а из каждой пары меньших большие, которые затем усредняют.
Данный способ авторы предлагают реализовать с помощью устройства управления тяговым электроприводом с n асинхронными двигателями, которые подключены к полупроводниковой преобразовательной установке. Указанное устройство содержит n датчиков частоты вращения, каждый из которых установлен на соответствующем двигателе, сумматор, выход которого подключен к системе управления преобразователя.
При n≥3 в него дополнительно введены блоки выявления большей и меньшей частот вращения, объединенные в отдельные группы. К входам каждого из указанных блоков первой группы подключены выходы соответствующей пары датчиков частоты вращения. При n нечетном выход непарного датчика частоты подключен к обоим входам соответствующего блока выявления большей и меньшей частот вращения первой группы. Выходы каждого из блоков первой группы попарно подключены к соответствующим аналогичным блокам второй группы, число которых равно четному числу блоков первой группы. Первый выход первого парного блока и второй выход второго блока каждой пары блоков первой группы подключены к одноименным входам одноименных парных блоков выделения сигналов второй группы. Второй выход первого и первый выход второго блоков каждой пары блоков первой группы подключены соответственно к первому входу второго и ко второму входу первого парных блоков второй группы. При этом второй выход первого и первый выход второго блоков каждой пары блоков второй группы являются одними входами сумматора.
Другие выходы указанных блоков при n≥5 подключены к блокам выявления большей и меньшей частот вращения третьей группы, число которых кратно двум.
При этом при четном и не равном трем числе блоков первой группы входы первого парного блока подключены каждый к соответствующему первому выходу обоих первых парных блоков второй группы так, что первым входом первого парного блока третьей группы является первый выход первого в первой паре блока второй группы блоков, а вторым его входом является первый выход первого во второй паре блока второй группы. Входами второго блока третьей группы являются вторые выходы пары вторых блоков второй группы. При этом второй выход первого и первый выход второго блоков третьей группы являются входами сумматора.
При нечетном и равном трем числе блоков первой группы выходы непарного ее блока подключены каждый ко второму входу соответствующего блока выделения сигналов третьей группы так, что первый выход непарного блока первой группы соединен с первым, а второй его выход со вторым блоком третьей группы. При этом к первым входам первого и второго блоков третьей группы подключены соответственно первый выход первого и второй выход второго блоков выделения сигналов второй группы.
При числе блоков первой группы, равном пяти, выходы непарного ее блока подключены ко вторым входам блоков выделения максимального и минимального сигналов четвертой группы, первыми входами которых являются соответственно для первого блока первый выход первого блока третьей группы, а для второго - второй выход второго блока третьей группы. А второй выход первого и первый выход второго блоков четвертой группы являются третьими входами сумматора.
Новым в предлагаемом способе является то, что сначала сравнивают между собой сигналы, пропорциональные частотам вращения каждой пары двигателей, и выделяют из них большее и меньшее значения. При этом при "n" нечетном сигнал, пропорциональный частоте вращения непарного двигателя, предварительно повторяют.
Затем попарно сравнивают между собой отдельно большие и отдельно меньшие значения всех выделенных сигналов и определяют последовательно из каждой пары больших частот вращения меньшее и из каждой пары меньших большее, которые затем усредняют.
Новым в предлагаемом устройстве является и то, что при n≥3 в него введены несколько групп блоков выявления большей и меньшей частот вращения (БВУ) с их связями между собой. При этом датчики частоты вращения подключены попарно к блокам выявления большей и меньшей частот вращения первой группы, если число n четное. А если n нечетное, выход непарного датчика частоты подключен к обоим входам соответствующего блока выявления первой группы.
Все сказанное позволяет формировать фактическую частоту вращения двигателей как среднюю из частот только тех двигателей, у которых частота вращения меньше большей (т.е. меньше частоты буксующей оси локомотива) и больше меньшей (т. е. больше частоты "юзящей" оси локомотива). То же самое относится к случаям, когда причиной отклонения от заданного режима работы являются не двигатели, а неисправный по каким-либо причинам датчик частоты вращения.
Таким образом, сказанное позволяет защитить электропривод от дальнейшего развития режимов буксования или юза путем формирования управляющих сигналов полупроводникового преобразователя из частот вращения только тех двигателей, которые работают с заданными техническими характеристиками.
Это позволяет сделать вывод, что способ и устройство заявляемого изобретения связаны между собой единым изобретательским замыслом. Сравнение заявленного технического решения с прототипами позволяет установить соответствие его критерию "новизна".
И, кроме того, сказанное позволяет сделать вывод о наличии причинно-следственной связи между совокупностью существенных признаков и достигаемым техническим результатом.
На фиг.1 приведена схема предлагаемого устройства, в котором реализуется предлагаемый способ управления при n 10; на фиг.2 то же, при n 8; на фиг.3 то же, при n 5; на фиг.4 то же, при n 4; на фиг.5 схема блока выявления большей и меньшей частот вращения; на фиг.6 схема вычитателя частот; на фиг.7 схема подключателя сумматора к системе управления преобразователя.
Рассмотрим схему предлагаемого устройства управления при наибольшем реальном числе двигателей электропривода подвижного состава n 10.
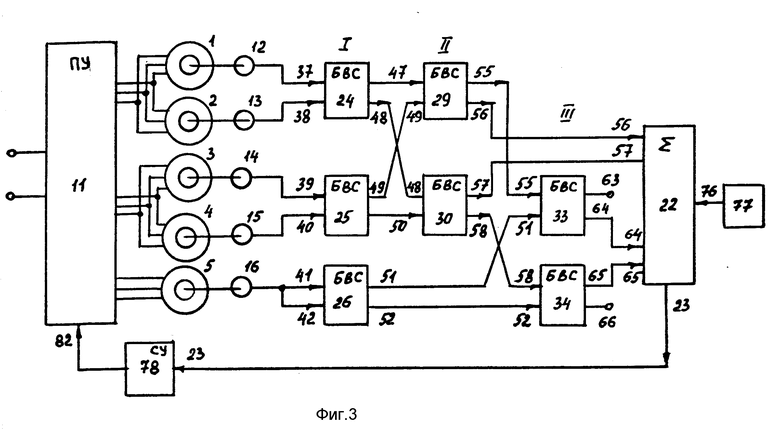
Устройство управления содержит 10 асинхронных двигателей 1 10, подключенных к полупроводниковой преобразовательной установке 11. На валу каждого двигателя 1 (2 10) установлен датчик 12 (13 21) частоты вращения. Устройство содержит сумматор 22, выход 23 которого подключен к управляющему входу 23 преобразователя 11. При числе двигателей n≥3 в устройство введены блоки 24 36 выявления большей и меньшей частот вращения, объединенные в отдельные группы: 1-ая группа блоки 24 28; 2-ая блоки 29 32; 3-тья группа блоки 33 34; 4-ая группа блоки 35 36.
К входам 37 46 каждого из указанных блоков 24 28 первой группы подключены выходы соответствующей пары датчиков частоты вращения: к входам 37, 38 датчики 12, 13; к входам 39, 40 датчики 14, 15; к входам 41, 42 - датчики 16, 17; к входам 43, 44 датчики 18, 19 и к входам 45, 46 датчики 20, 21.
При этом при n нечетном выход непарного датчика частоты (см. фиг.3 выход 41, датчик 16) подключен к обоим входам 41 и 42 блока 24 выделения сигналов первой группы.
Выходы каждого из блоков 24 27 первой группы попарно подключены к соответствующим блокам 29 32 БВУ второй группы, число которых равно четному числу блоков первой группы (в данном случае четырем) так, что первый выход 47(51) первого блока 24(26) и второй выход 50(54) второго блока 25(27) в каждой паре 24, 25(26, 27) блоков первой группы подключены к одноименным входам парных блоков 29, 30(31, 32) выделения сигналов второй группы.
Второй выход 48(52) первого блока 24(26) и первый выход 49(53) второго блока 25(27) каждой пары блоков 24, 25(26, 27) первой группы подключены соответственно к первому входу 48(52) второго блока 30(32) и ко второму входу 49(53) первого блока 29(31) второй группы.
При этом второй выход 56(60) первого блока 29(31) и первый выход 57(61) второго блока 30(32) каждой пары 29, 30(31, 32) блоков второй группы являются одними 56, 57, 60, 61 входами сумматора 22.
Другие входы 55, 58(59, 61) указанных блоков при n≥5 подключены к блокам 33, 34 выделения сигналов третьей группы, число которых кратно двум. При этом при четном и не равном трем числе блоков первой группы (см. фиг.2, n 8) входы 55, 59 первого парного блока 33 третьей группы подключены, каждый к соответствующему первому выходу 55, 59 обоих первых 29, 31 парных блоков второй группы. А именно, первым входам 55 первого парного блока 33 третьей группы является первый выход 55 первого 29 блока в первой паре блоков 29, 30, а вторым его входом 59 является первый выход 59 первого блока 31 во второй паре блоков 31, 32 второй группы.
Входами 58, 62 второго блока 34 третьей группы являются вторые выходы 58,62 пары вторых блоков 30,32 второй группы.
А второй выход 64 первого блока 33 и первый выход 65 второго блока 34 третьей группы являются другими входами 64, 65 сумматора 22.
При нечетном и равном трем числе блоков первой группы (см. фиг.3, n 5) выходы 51, 52 непарного ее блока 26 подключены, каждый ко второму входу 51(52) соответствующего блока 33(34) БВЧ третьей группы так, что первый выход 51 непарного блока 26 первой группы соединен с первым блоком 33, а второй его выход 52 со вторым блоком 34 третьей группы.
При этом к первому входу 55 первого блока 33 и к первому входу 58 второго блока третьей группы подключены соответственно первый выход 55 первого блока 29 и второй выход 58 второго блока 30 выделения сигналов второй группы.
Кроме того, при числе блоков первой группы, равном пяти (фиг.1, n 10), выходы 67, 68 непарного ее блока 28 подключены ко вторым входам 67 и 68 обоих блоков 35 и 36 выделения сигналов четвертой группы. Первыми входами 63 и 66 блоков 35 и 36 являются соответственно для первого блока 35 первый выход 63 первого блока 33 третьей группы, а для второго блока 36 второй выход 66 второго блока 34 третьей группы. При этом второй выход 70 первого блока 35 и первый выход 71 второго блока 36 четвертой группы являются третьими входами 70, 71 сумматора 22.
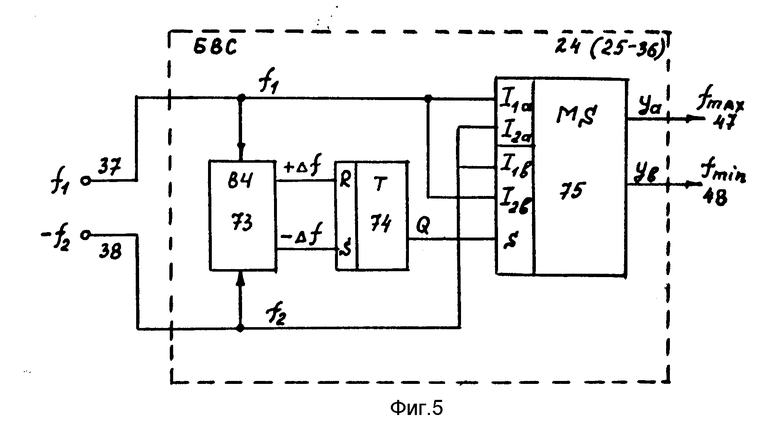
Схема блоков выявления большей и меньшей частот вращения 24(25 36) с ее внутренними связями приведена на фиг.7. Указанный блок БВЧ включает в себя вычитатель частот 73 RS триггер 74 и мультиплексор 75 (фиг.5).
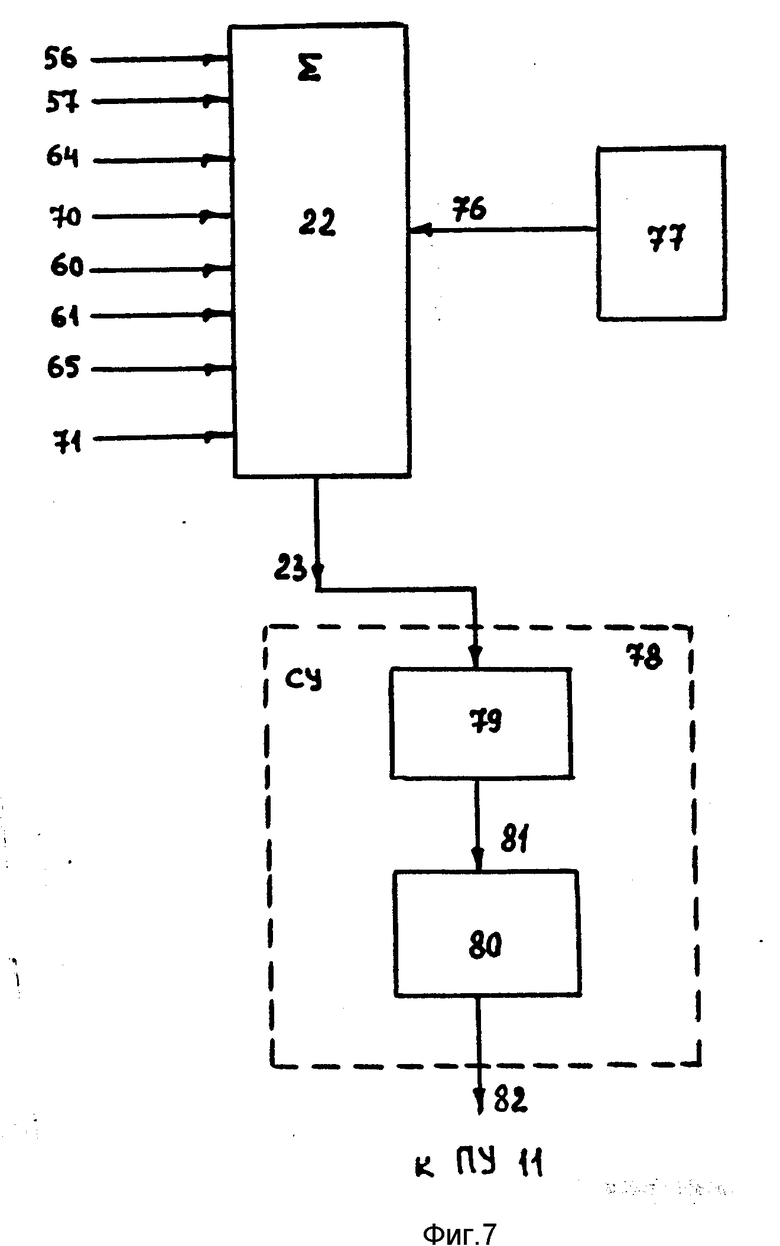
Сумматор 22 (фиг. 7) является многовходовым сумматором. К его входу 76 подключен генератор абсолютного скольжения 77, а выходом 23 сумматор 22 подключен к системе управления 78 преобразователя, включающий в себя делитель частоты 79 и собственно блок управления 80, к которому подключен выход 81 делителя 79, а выход 82 СУ 78 подключен к преобразователю 11.
Для питания тяговых двигателей используются полупроводниковые преобразователи частоты и напряжения любого типа в зависимости от характера питающей сети, вида подвижного состава и использования элементной базы.
В частности, для рассматриваемого конкретного примера может быть использована схема преобразователя частоты, приведенная, например, в книге "Преобразовательные устройства электропоездов с асинхронными тяговыми двигателями", авторы: А.М.Солодунов и др. изд. "Зинатне", Рига, 1991, стр.125.
В качестве системы управления 78 (фиг.7) может быть использована система управления, описанная, например, в книге "Системы управления автономными инверторами", авторы: Б.Е.Калашников и др. изд. "Энергия", м. 1974.
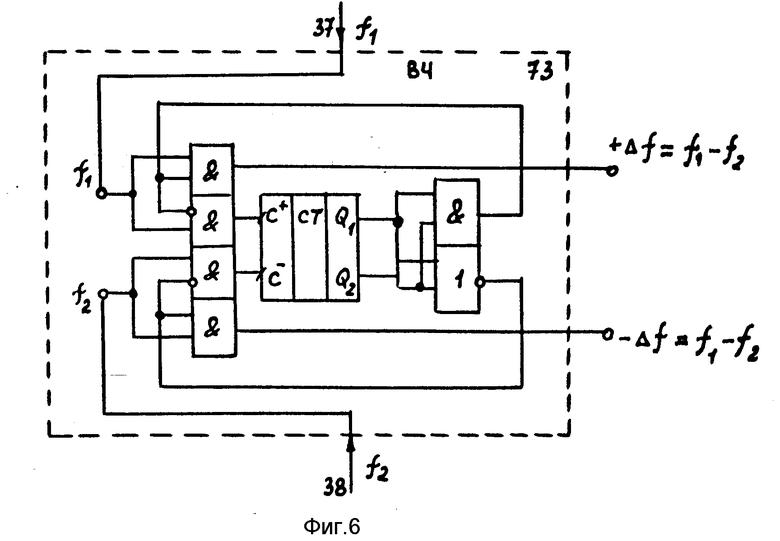
Схема вычитателя частот 71 (фиг.5) общеизвестна и приведена в книге В.С. Гутникова "Интегральная электроника в измерительных устройствах", Л. "Энергоатомиздат", 1988, стр. 177.
В качестве RS-триггера 72 могут быть использованы триггеры серии 155ТМ2, описанные в "Справочнике по интегральным микросхемам" под ред. Б.В.Тарабрина, М. "Энергия", 1981, стр.135.
Схема предлагаемого мультиплексора, например, типа 155КП11, общеизвестна и описана в книге В. П.Шило "Популярные цифровые микросхемы", Челябинск, "Металлургия", 1988.
Многовходовый сумматор 22 выполнен на многовходовом логическом элементе ИЛИ, см. например, книгу "Микросхемы и их применение" (справочное пособие), авторы: В. А. Батушев и др. изд. "Радио и связь", М. 1983, вып. 1070, стр. 126.
Генератор 77 абсолютного скольжения может быть построен, например, на основе мультивибраторов или преобразователей напряжения в частоту, см. книгу В. С. Гутникова "Интегральная электроника в измерительных устройствах", изд. "Энергия", Л. 1980, стр. 174-177.
Делитель частоты 79 может быть использован на основе счетчика с коэффициентом пересчета, соответствующим числу тяговых двигателей см. например, там же, стр. 221 223.
Прежде чем рассмотреть в действии предлагаемое техническое решение, проследим принцип действия любого из блоков выявления большей и меньшей частот вращения (БВЧ), например, БВЧ 24 (фиг. 5).
При появлении на входах 37, 38 БВС 24, а, значит и на входах вычитателя частот 73 импульсов f1 и f2 на выходах вычитателя 73 (фиг. 6) появляются положительное + f или отрицательное f превышение одной частоты над другой. Эти импульсы, попадая в триггер 74, переводят его из одного состояния в другое.
Если на выходе R триггера 74 появился сигнал + f, то на его выходе Q сигнал пропадает, а значит он не поступает на вход S мультиплексора 75. В результате импульсы f1 и f2 свободно проходят на входы I1a и I2a мультиплексора 75, а на выходах его Уa и Ув (а значит и на выходах 47 и 48 БВЧ 24) появляются сигналы, соответствующие (на выходе Уa) максимальному и на выходе Ув меньшей из частот вращения f1 и f2.
Если же в следующий момент на входе S триггера 74 появился импульс f, триггер 74 сбрасывает предыдущую информацию, на выходе Q появляется сигнал, который переводит мультиплексор 75 на другие каналы (I1в, I2в) работы. На выходах Уa (47) и Ув (48) мультиплексора 75 вновь появятся сигналы, соответствующие (на выходе Уa) максимальному и на выходе Ув минимальному значениям из f1 и f2.
Таким образом, в БВЧ 24 0 36 происходит постоянный отбор максимального и минимального значений из двух частот f1 и f2, поступающих на входы БВЧ.
Проследим теперь реализацию предлагаемого способа на двух примерах конкретного выполнения предлагаемого устройства.
Пример 1. При числе двигателей n 4 (фиг. 4).
При фиксировании, например, датчиком 12 частоты, величина которой значительно превышает частоту вращения ротора двигателя 1 в заданном режиме, на выходе 47 БВЧ 24 появляется сигнал f46 Fmax из двух частот f37 и f38. Допустим, что при этом сигналы, появляющиеся на выходах датчиков 13, 14, 15 соответствуют заданному режиму работы двигателей 2, 3, 4. Тогда на выходах 49 и 50 БВЧ 25 появляются импульсы частот соответственно fmax и fmin, которые были выделены БВЧ 25 по текущим значениям импульсов, поступивших на его входы 39 и 40. В результате на входы 47 и 49 БВЧ 29 поступают импульсы f47 и f49, причем f47 f49. А на выходы 48 и 50 БВЧ 30 поступают импульсы, фиксирующие практически одинаковый режим работы двигателей 2, 3, 4 с незначительными отклонениями друг от друга.
Эти импульсы f48 и f50 также сравниваются с БВЧ 30, и на его выходах 57 и 58 появляются f57=fmax и f58=fmin из двух сравниваемых частот.
А далее сигналы f56≅f55 и f57 ≥f58 поступают в сумматор 22, в котором суммируется с частотой абсолютного скольжения, поступающей от генератора абсолютного скольжения 77 (фиг.7). Затем эти импульсы попадают в делитель 79 и далее в блок управления 80 преобразователя 11, в результате чего на выходе преобразователя формируется частота напряжения и тока статора асинхронного двигателя, равная сумме частоты скольжения и средней частоты вращения роторов двигателей, не вышедших из заданного режима работы. И, таким образом, fвр. превышение частоты вращения двигателя буксующей колесной пары вообще исключается из формирования частоты статора двигателей.
Аналогичные процессы происходят в случае, если на выходе какого-либо из датчиков частоты появляется частота fвр. ≅fзад.режима, что говорит о развитии режима юза соответствующей колесной пары. В результате частота двигателя "юзящей" колесной пары исключается из формирования среднего значения частоты вращения роторов, а значит и частоты статора.
Пример 2. При n 8 (фиг.6).
При большем числе двигателей (n 8) первоначальные импульсы частоты, поступающие с датчиков 12 19, попарно сравниваются между собой аналогичным образом. На выходах 55 и 59 БВЧ 29 и 31 появляются большие частоты: f55 (большая из частот двигателей 1 4) и f59 (большая из частот двигателей 5 8). А на выходах 57 и 61 БВЧ 30 и 32 появляются меньшие частоты f57 и f61 (f57 меньшая из частот двигателей 1 4, f61 меньшая из частот двигателей 5 8). Поэтому на входы сумматора 22 приходят импульсы f56, f60 и f57, f61 соответственно меньших из больших и большие из меньших четырех пар двигателей 1 4 и 5 8.
А импульсы частот f55 и f59 с выходов БВЧ 29 и 30, являющиеся большими, и F58 и f62, являющиеся меньшими в своих парах двигателей, поступают соответственно в БВЧ 33 и 34. Здесь из двух больших частот f55 и f59 (БВЧ 33) вновь выявляется большая, а из двух меньших частот f58 и f62 (БВЧ 34) наименьшее. А минимальный максимум частоты с выхода 64 БВЧ 33 и максимальный минимум частоты с выхода 65 БВЧ 34 поступают в блок 22, где суммируются значения частот вращения шести двигателей, колесные пары которых не находятся в режиме буксования или юза.
Таким образом, предложенные способ и устройство позволяют выявить "буксующую" или "юзящую" колесную пару и исключить их влияние на формирование среднего значения частоты вращения ротора, а значит и частоты питания статора, и тем самым предотвратить дальнейшее развитие этих режимов в других колесных парах, что значительно повышает надежность работы электропривода в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1995 |
|
RU2123757C1 |
| АСИНХРОННЫЙ ДВИГАТЕЛЬ | 1992 |
|
RU2088042C1 |
| ЭЛЕКТРОПРИВОД С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2101845C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕВИЗИОННЫХ СИГНАЛОВ | 1991 |
|
RU2014745C1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088041C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |


Использование: железнодорожный и городской транспорт. Сущность изобретения: измеряют частоты вращения асинхронных тяговых двигателей, сравнивают их между собой, исключая максимальную и минимальную частоты, а оставшиеся усредняют. Полученным усредненным сигналом осуществляют управление преобразовательной установкой, в частности частотой ее выходного напряжения. Это позволяет определить колесную пару, находящуюся в режимах боксования или юза, и ликвидировать эти режимы. В устройстве, реализующем подобный способ управления, к выходам датчиков частоты вращения двигателей подключены попарно-ступенчато блоки выявления большей или меньшей частот, альтернативные выходы которых, начиная со второй ступени, соединены с соответствующими входами сумматора. 2 с.п. ф-лы, 7 ил.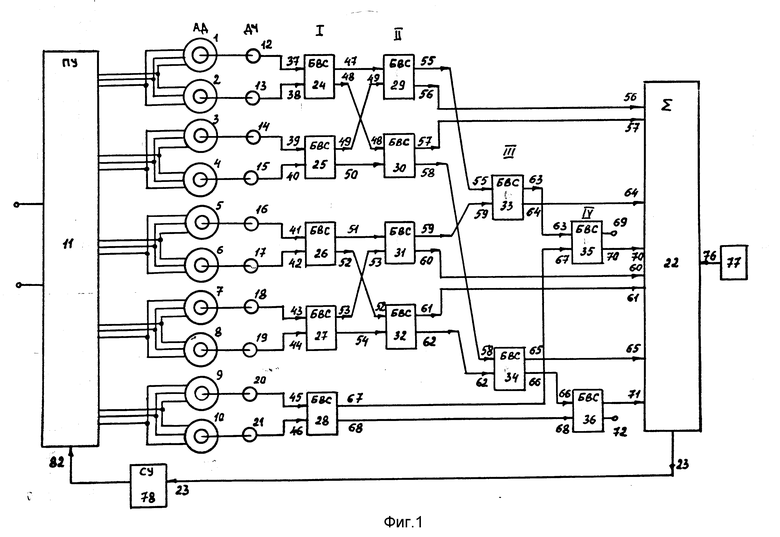
| JP, заявка, 59-24636, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
