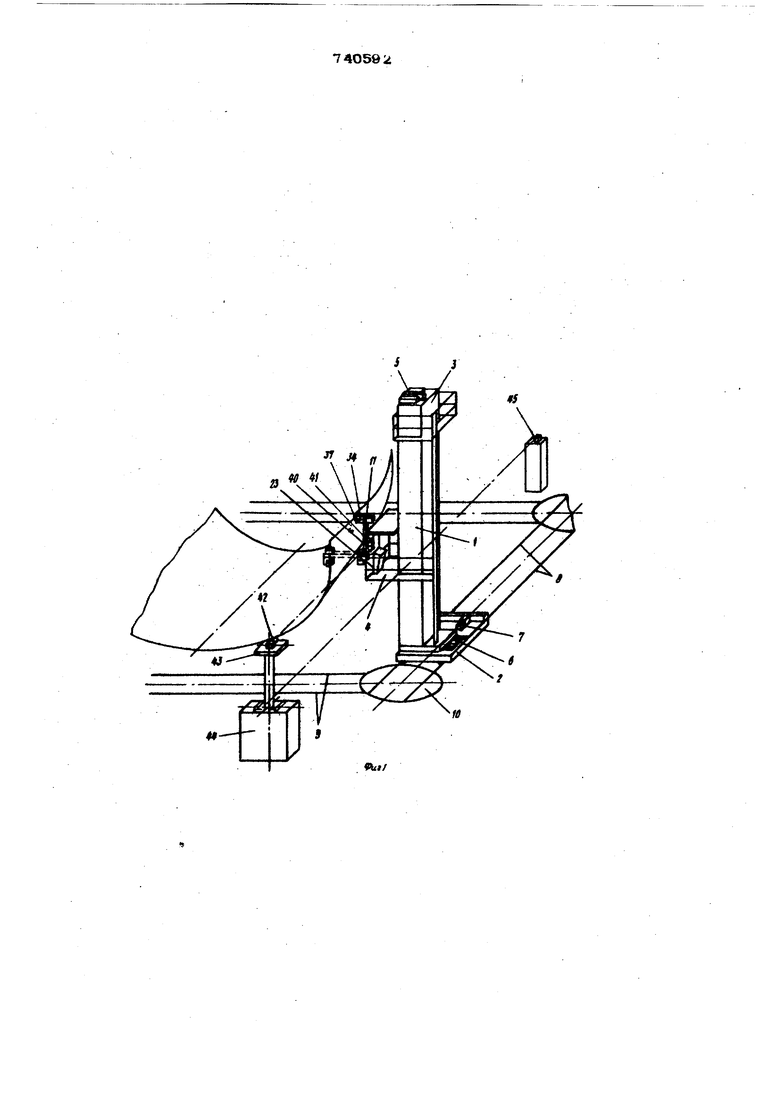
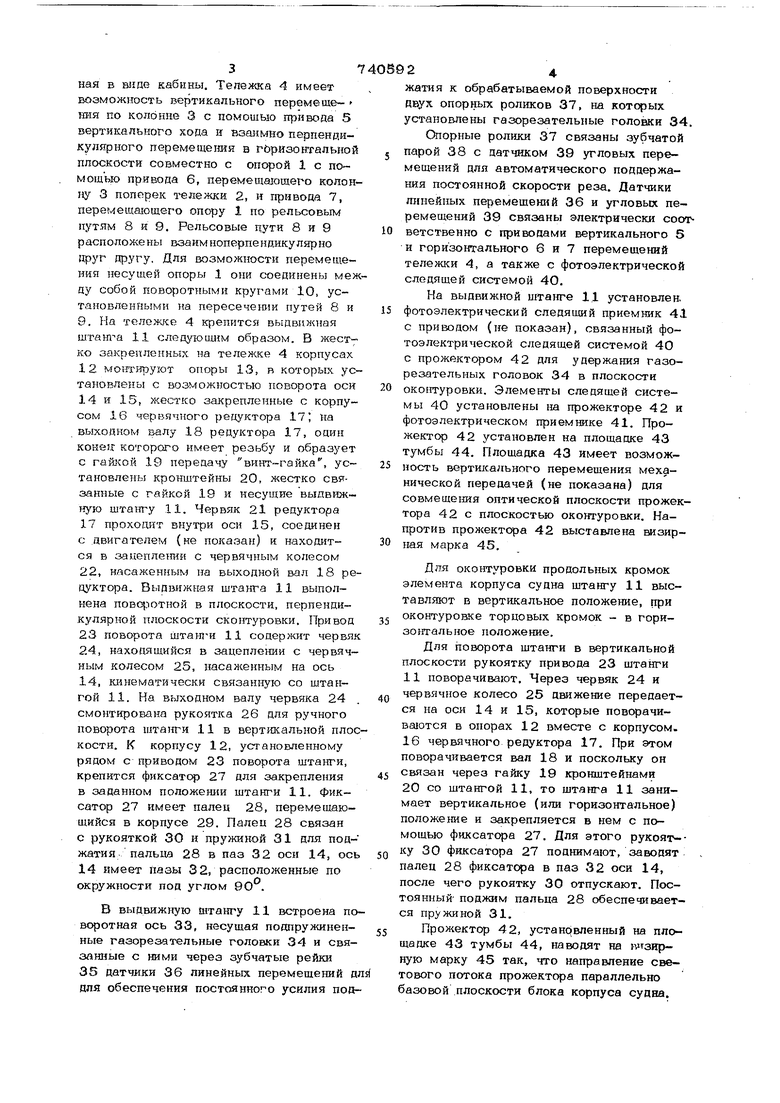
Изобретение относится к судостроо- ПИЮ. По основному авг.са № 612844, известно Устройство для оконтуровкя стыкуе мых элементов корпуса супна, содержащее прибор, задающий плоскость оконтуровкя, состоящий из прожектора и фотоэлектри ческого приемника, тележку с приводом, снабженную выдвижной штангой, на которой установлены фотоэлектрический приемВПК и подпружиненные газорезательные головки, причем .устройство снабжено подвижной несущей опорой, на которой установлены тележка и приводы вертикального я горизонтального,перемещенияя тележки, а газорезательные головки установлены ва пвух опорных роликах, при этом на тележке установлены фотоэлектрическая следящая система, датчики угловых и линейных перемещений газорезательных го ловок, связанные с приводами вертикального я горизонтального перемещения тележкя и следящей системой, связанной с прожектором и фотоэлектрическим прием виком, а напротив прожектора установлена визирная марка. Недостатком такого устройства является невозможшхзть оконтуровки элементов корпуса судна в горизоигальной плоскости, Цель изобретения - расширение функциональных возможностей. Поставленная цель достигается тем, что выдвижная штанга выполнена с воэможвостыо фиксированного поворота в плоскости, перпендикулярной плоскости окоигуровкн. На фиг. 1 показано предлагаемое устройство для оконтуровки стыкуемых элементов корпуса судна, общий вид, ка фиг. 2 - выдвижная штанга разрез, на фиг. 3 - привод поворота штанги, сечение А-А фиг. 2. Устройство для оконтуровки стыкуемых элементов корпуса судна включает в себя несущую опору 1, вьшолненную в виде самоходной тележки 2, на которой установлена колонна 3. На колонне 3 смонтирована тележка 4, выполненная в кабины. Тележка 4 имеет возможность вертикального перемеще шя по колонне 3 с noMouibjo привода 5 вертикального хода н взаимно перпендикулярного перемещения в гбризонтальной плоскости совместно с опорой 1 с помощью привода 6, перемещающего колоиj 3 поперек тележки 2, и гфивода 7, перемещающего опору 1 по рельсовым путям 8 и 9, Рельсовые пути 8 и 9
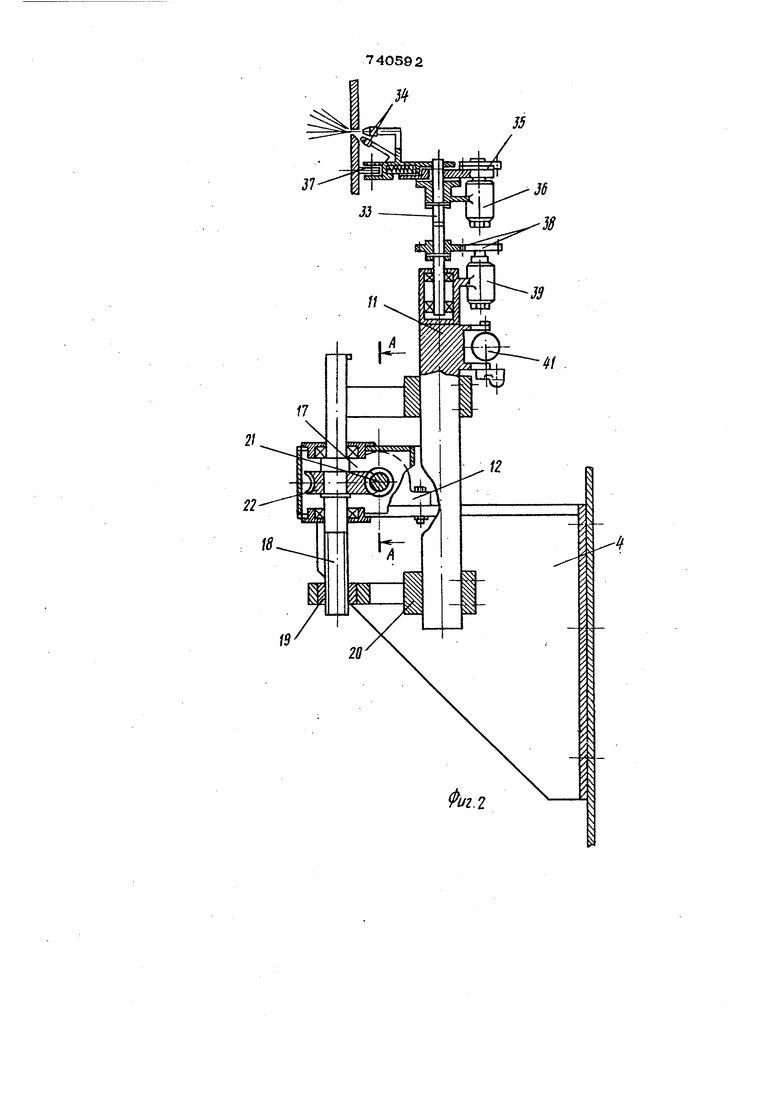
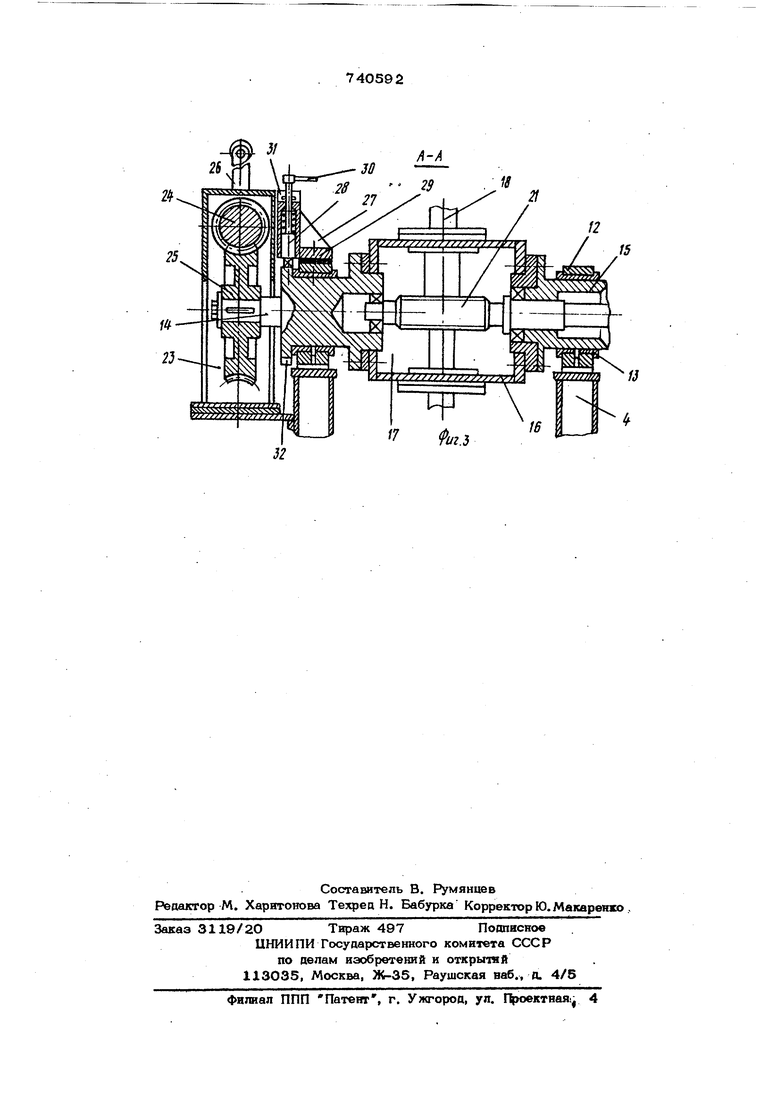
располохсены взаимноперпенйикул$фно друг другу. Для возможности перемещения несущей опоры 1 они соединены между собой поворотными кругами 10, установленными на пересечении путей 8 и 9. На тележгсе 4 крепится выдвижная штан-га 11 слещюишм образом. В жестко закрепленных на тележке 4 корпусах 12 мош ируют опоры 13, в которых установлены с гюзможностыо поворота оси 14 и 15, жестко закрепленные с корпусом 16 червячного рецуктора на выходном валу 18 рецуктора 17, один которого имеет резьбу и образует с гайзсой 19 нереаачу винт-гайка, установлены кронштейны 20, жестко связанные с гайкой 19 и несущие выдвижную штангу 11. Червяк 21 рецуктора 17 проходит внутри оси 15, соединен с ,авигателе ч1 (не показан) и находится в зацепле1ши с червячным колесом 22, насаженным на выходной вал 18 редуктора. Выдвижная штанга 11 выполнена noaqjOTHOH в плоскости, перпендикулярной плоскости сконтуровки. Привод 23 поворота шташИ 11 содержит червяк 24, находящийся в зацеплении с червячным колесом 25, насаженным на ось 14, кинематически связанную со штангой 11. На выходном валу червяка 24 смонтирована рукоятка 26 для ручного поворота штает-и 11 в вертшсальной плоскости. К корпусу 12, установленному рядом с приводом 23 поворота штанги, крепится фиксатср 27 для закрепления
в заданном положении штанги 11. фиксатор 27 имеет палец 28, перемещающийся в корпусе 29. Палец 28 связан с рукояткой 30 и пружиной 31 для поджатия. пальца 28 в паз 32 оси 14, ос 14 имеет пазы 32, расположенные по окружности под углом 9О .
В выдвижную штангу 11 встроена поворотная ось 33, несущая подпруяданенныв газорезательные головки 34 и связанные с ними через зубчатые рейки 35 датчики 36 линейных перемещений д для обеспечения постоянного усилия поджатия к обрабатываемой поверхности двух опорных роликов 37, на которых установлены газорезательные головки 34
Опорные ролики 37 связаны зубчатой парой 38 с датчиком 39 угловых перемещений для автоматического поддержания постоянной скорости реза. Датчики линейпых перемешеннй 36 и угловых перемещений 39 связаны электрически сооветственно с приводами вертикального 5 и горизонтального 6 и 7 перемещений телешси 4, а также с фотоэлектрической следящей системой 40.
На выдвижной штанге 11 установлен, фотоэлектрический следящий приемник 41 с приводом (не показан), связанный фотоэлектрической следящей системой 40 с прожектором 42 для удержания газорезательных головок 34 в плоскости окоЕтгуровки. Элементы следящей системы 40 установлены ш прожекторе 42 и фотоэлектрическом приемнике 41. Прожектор 42 установлен на площадке 43 тумбы 44. Площадка 43 имеет возможность вертшсаяьного перемещения механической передачей (не показана) для совмещения оптической плоскости прожектора 42 с плоскостью оконтуровки. Напротив прожектора 42 выставлена визирпая марка 45.
Для оконтуровки продольных кромок элемента корпуса судна штангу 11 выставляют в вертикальное положение, при оконтуровке торцовых кромок - в горизонтальное положение.
Для поворота штанги в вертикальной плоскости рукоятку привода 23 штанги 11 поворачивают. Через червяк 24 и червячное колесо 25 движение передается на оси 14 и 15, которые поворачиваются в опорах 12 вместе с корпусом. 16 червячного редуктора 17. При этом поворачивается вал 18 и поскольку он связан через гайку 19 кронштейнами 20 со штангой 11, то штанга 11 занимает вертикальное (или горизонтальное) положе1ше н закрепляется в нем с помощью фиксатфа 27. Для этого рукоятку 30 фиксатора 27 поднимают, заводят палец 28 фиксатора в паз 32 оси 14, после чего рукоятку 30 отпускают. Постоянный- поджим пальца 28 обеспечивается пружиной 31.
Прожектор 42, устанрвленный на площадке 43 тумбы 44, ювoдят на ь тзирную марку 45 так, что направление светового потока прожектора параллельно базовой плоскости блока корпуса судна. Затем площадку 43 с прожектором 42 вертикально перемещают до совмещения оптической плоскости прожектора 42 с плоскостью эконтуровки. Затем фотоэлек трический приемник 41, установленный на выдвижной штанге 11, вводет в световой поток прожектора 42, для чего включают привод колонна 3 перемещается поперек тележки 2 в направлении к продольной оконтуровываемой кром ке до соприкосновения опорных роликов 37 с оконтуровываемой поверхностью. З тем осуществляют выдвижение штанги 11. Для этого включают двигатель (непоказан), приводящий во вращение редук тор 17. Вращение передается на выходной вал 18 редуктора. При этом начинает двигаться вдоль вала 18 гайка 19 перемещая кронштейны 2О и штангу 11 в вертикальном направлении. Таким образом осуществляются ввод и корректиройса положения приемника 41 относительно прожектооа 42. Затем фотоэлектрическую следящую систему 4О перево дят в режим автоматического отслежива ния, при котором происходит взаимосвязанное автоматическое перемещение прожектора 42 н приемника 41 в плоскости реза. После этого включают газорезательные головки 34 и производят оконт-уровку кромок элемента корпуса судна. При движении газорезательных головок 34 вдоль оконтуровыЕ5аемой поверхности опорные ролики 37 удерливают газореза тельные головки 34 по нормали к обраб тываемой поверхности и на постоянном расстоянии от нее. Два опорных ролика 37 через ось 33, зубчатую пару 38 пер дают соответствующие сигналы на датчик 39 угловых перемещений, который воздействует на приводы вертикального 5 и горизонтального 6 и 7 перемещения тележки 4. Есш по какой-то причине опорные ролики 37 уменьшают или увеличивают усилие поджатия к оконтуровываемой поверхности, то через зубчатую рейку 35 срабатывает датчик линейных перемещений 36, подавая корректирующие сигналы на приводы 5 и 6 перемещения тележки 4, в результате чего происходит соответствующее изменение горизонтальной и вертикальной скорости п емещения тележки 4 и обеспечивается постоянное поджатие опорных роликов 37 к оконтуровываемой поверхности. Приемник 41 при проведешга оконтуровкй элемента удер;кивает газорезательные головки 34 в плоскости оконтуровкй. По окончашш оконтуровкй продольных элементов корпуса судна в горизош альгной плоскости опору 1 перемещают на поворотный круг 10, поворачивают его и производят подготовку устройства к оконтуровке торцовых кромок элементов корпуса судна. Для этого штангу 11 из вер тикального положения перемещают в горизогггальное, настраивают прожектор 42 дяя создания вертикальной оптической плоскости, перпендикулярной к базовой линии элемента, и производят оконтуровку, как уже указано. Внедрение изобретения обеспечивает оконутровйу стыковых элементов корпуса судна, расположенных в двух взаимно перпендикулярных плоскостях, на одном технологическом оборудовании. Формула изобретения Устройство для окогггуровки стыкуемых элементов корпуса судна по авт.св. № 612844, отличающееся тем, что, с пелью расширения функциональных возможностей, выдвижная штанга выполнена с возможностыо фиксированного поворота в плоскости, перпендикулярной плоскости оконтуровкй.
4S
10
19
35
Фиг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1981 |
|
SU1002180A2 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1982 |
|
SU1074760A2 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1975 |
|
SU612844A1 |
| УСТРОЙСТВО ДЛЯ ОКОНТУРОВКИ СТЫКУЕМЫХ ЭЛЕМЕНТОВ | 1973 |
|
SU380520A1 |
| Стенд для контуровки корпусных конструкций | 1983 |
|
SU1100187A1 |
| Устройство для обрезки по контуру стыкуемых элементов корпуса судна | 1981 |
|
SU965874A1 |
| Способ установки блока корпуса судна на стапеле | 1983 |
|
SU1127796A1 |
| Способ установки блоков корпуса судна на стапеле | 1982 |
|
SU1043066A1 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1980 |
|
SU990577A1 |
| Устройство для обрезки стыкуемых элементов корпуса судна | 1975 |
|
SU529916A1 |