щине и ширине срезаемых стружек при экскавации угля.
Поставленная цель достигается тем, что устройство снабжено блоком управления приводом хода, вторым суммирующим элементом, усилителем и датчиками хода и скорости ротора, причем выход датчика скорости ротора через пороговый элемент подключен к одному из входов первого суммирующего элемента, к другому входу которого через блок управления приводом ротора подключен соединенный с блоком измерения кусковатости второй суммирующий элемент, к третьему входу подключен датчик хода, а выходы первого и второго суммирующих элементов подключены соответственно через усилитель к приводу ротора и через блок управления приводом хода к приводу хода.
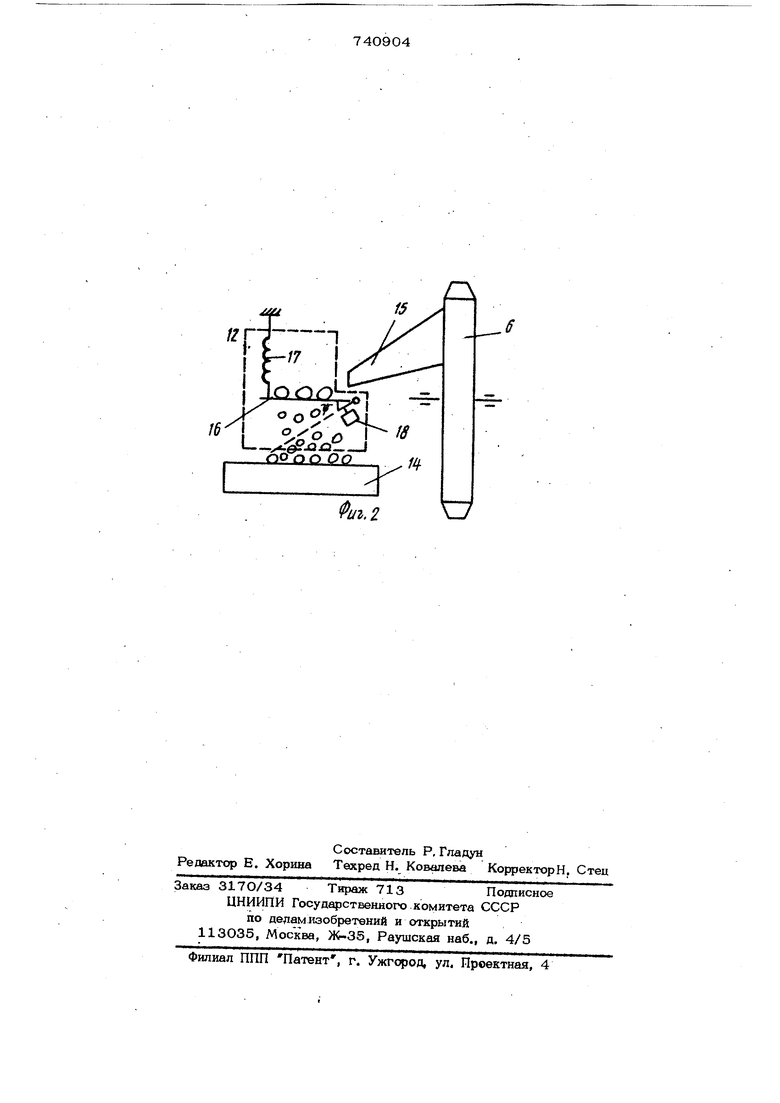
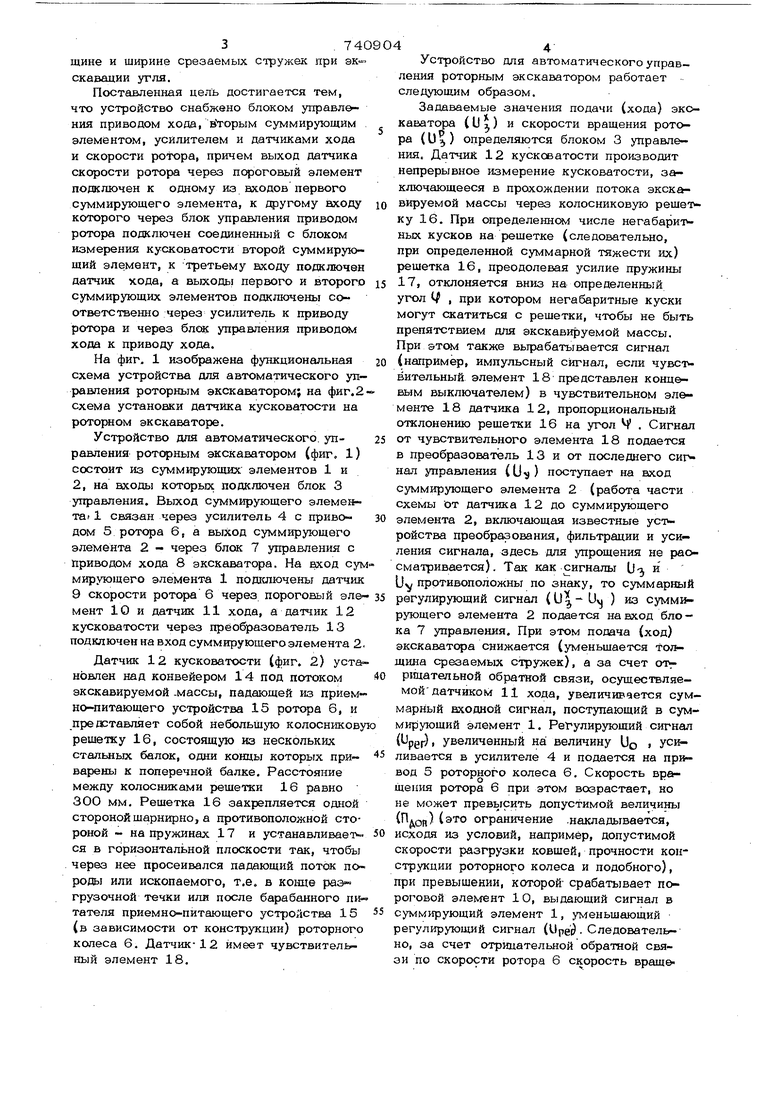
На фиг, 1 изображена функциональная схема устройства для автоматического управления роторным экскаватором; на фиг.2 схема установки датчика кусковатости на роторном экскаваторе.
Устройство для автоматического, управления экскаватором (фиг. 1) состоит из суммирующих элементов 1 и 2, на входы которых подключен блок 3 управления. Выход суммирующего элемента 1 связан через усилитель 4 с приводом 5 ротора 6, а выход суммирующего элемента 2 - через блок 7 управления с приводом хода 8 экскаватора. На вход суммирующего элемента 1 пошшючены датчик 9 скорости ротора 6 через пороговый элемент 10 и датчик 11 хода, а датчик 12 кусковатости через преобразователь 13 подключен на вход суммирующего элемента 2 Датчик 12 кусковатости (фиг. 2) уста новлен над конвейером 14 под потоком экскавируемой .массы, падающей из приемно-питающего устройства 15 ротора 6, и представляет собой небольшую колосникову решетку 16, состоящую из нескольких стальных балок, одни концы которых приварень к поперечной балке. Расстояние между колосниками рещетки 16 равно ЗОО мм. Рещетка 16 закрепляется одной стороной щарнирно, а противоположной стороной - на пружинах 17 и устанавливает ся в горизонтальной плоскости так, чтобы через нее просеивался падающий поток породы или ископаемого, т.е. в ковде раэ грузочной течки или после барабанного п№ тателя приемно-питающего устройства 15 (в зависимости от конструкции) роторного колеса 6. Датчик-12 имеет чувствительный элемент 18.
Устройство для автоматического управления роторным экскаватором работает следующим образом.
Задаваемые значения подачи (хода) экокаватора (U i) и скорости вращения ротора (1)) определяются блоком 3 управления. Датчик 12 кусковатости производит непрерывное измерение кусковатости, заключающееся в прохождении потока экскавируемой массы через колосниковую решет ку 16. При определенном числе негабаритных кусков на рещетке (следовательно, при определенной суммарной тяжести их) решетка 16, преодолевая усилие пружины 17, отклоняется вниз на определенный угол t/ , при котором негабаритные куски могут скатиться с решетки, чтобы не быть препятствием для экскави эуемой массы. При sTCW также вырабатывается сигнал (например, импульсный сигнал, если чувствительный элемент 18 представлен конц&вым выключателем) в чувствительном эл&менте 18 датчика 12, пропорциональный отклонению решетки 16 на угол Ч . Сигнал от чувствительного элемента 18 подается в преобразователь 13 и от последнего сигнал управления (U) поступает на вход суммирующего элемента 2 (работа части схемы от датчика 12 до суммирующего элемента 2, включающая известные уст ройства преобразования, фильтрации и усиления сигнала, здесь для упрощения не рассматривается). Так как сигналы }- к Uv противоположны по знаку, то суммарный регулирующий сигнал (U - UNJ ) из суммирующего элемента 2 подается на вход блока 7 управления. При этом подача (ход) экскаватора снижается (уменьшается Толщина срезаемых стружек), а за счет от рщательной обратной связи, осущес-геляемойдатчиком 11 хода, увеличивается суммарный входной сигнал, поступающий в суммирующий элемент 1. Регулирующий сигнал (Upg), увеличенный на: величину DO усиливается в усилителе 4 и подается на привод 5 роторного колеса 6. Скорость вращения ротора 6 при этом возрастает, но не может превьгсить допустимой величины (Пдод) (это ограничение .накладывается, исходя из условий, например, допустимой скорости разгрузки ковшей, прочности конструкции роторного колеса и подобного), при превышении, которой срабатывает пороговой элемент 10, выдающий сигнал в суммирующий элемент 1, уменьшающий регулирующий сигнал (Upe . Следовательно, за счет отрицательной обратной связи по скорости ротора 6 скорость враще57409ния последнего поддерживается на уровне, не превышающем допустимую величину. Снижение подачи (хода) экскаватора и увеличение скорости вращения роторного кол& са происходит до тех пор, пока не прекра- тится появление негабаритных кусков в потоке экскавируемой массы. Применение устройства дает значитель.ный экономический эффект и позволяет уменьшить динамику привода роторного леса, и следовательно, металлоконструкций экскаватора, повышает эксплуатационную надежность роторного экскаватора и исклк чает появление некондиционных кусков. Формула изобретения
Устройство для автоматического утфа ления роторным экскаватором, содержащее Q блсж измерения кусковатости, выполненный в виде связанного с преобразователем датчика кусковатости, пороговый элемент, блок управления приводом ротора и суммирувдщий элемент, отличающе- 25 е, с я тем, что, с целью повышения эф фективности управления кусковатостью за счет формирования кондиционных кусков 15
Источники инф мации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 37О324, кл. Е O2F 3/24, 1967.
2.Авторское свидетельствую СССР № 394S09, кл. Е О2 F 9/2О, 1968.
3.Авторское свидетельство СССР по заявке № 2430198/03, кл.Е 02 F 3/26, |197б. 44 по толщине и ширине срезаемых, стружек при экскавации угля, оно снабжено блоком управления приводом хода, вторым суммирующим элементом, усилителем и датчиками хода и скорости ротора, причем вы- ход датчика скорости ротора через пороговый элемент подключен к одному.из входов первого сумм1фующего элемента, к футом у входу которого через блок унравления приводом ротора подключен соединенный с блоком измерения кусковатостч второй суммирующий элемент, к третьему входу подключен датчиК хода, а выходы первого и второго суммирующих элементон подключены соответственно через ycitлитель к приводу ротора и через блок управления приводом хода .к приводу хода.
/J
«O
X -L-xee -i
J6
00 QQ DO
Фиг. 2
J
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган роторного экскаватора | 1985 |
|
SU1305257A1 |
| Устройство для управления приводом роторного колеса экскаватора | 1980 |
|
SU968198A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| РАБОЧИЙ ОРГАН КАРЬЕРНОГО РОТОРНОГО ЭКСКАВАТОРАВ. К. Трофимов, В, М. Бух, В. М, Владимиров, А. Г. Минчин | 1973 |
|
SU378596A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РЕЖИМА РАБОТЫ МАШИН | 1971 |
|
SU290993A1 |
| РАБОЧИЙ ОРГАН РОТОРНОГО ЭКСКАВАТОРА | 1972 |
|
SU347406A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЬ[М ЭКСКАВАТОРОМ | 1971 |
|
SU304333A1 |
| Рабочий орган карьерного роторного экскаватора | 1972 |
|
SU749989A2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU302444A1 |
| Рабочий орган роторного экскаватора | 1987 |
|
SU1437487A1 |