Изобретение относится к средствам автоматизации производственных процессов на открытых горных работах и может быть использовано для управления роторным экскаватором.
Известно устройство для автоматического управления роторным экскаватором, включающее задатчик и датчик производительности экскаватора, датчик нагрузки ротора, механизм определения удельной энергоемкости привода ротора, блок сравнения, делительный блок, суммирующий элемент и регулятор, который регулирует производительность роторного колеса при отклонении ее от заданной величины в функции нагрузки привода роторного колеса и его удельной энергоемкости f1.
Недостатком такого устройства является недоиспользование роторного колеса по производительности при изменении состояния экскавируемого материала (например, изменение влажности) .
Наиболее близким к изобретению по технической суьдаости и достигаемому результату является устройство для управления приводом роторного колеса экскаватора, включающее привод
роторного колеса, задатчик и датчик скорости колеса, суммирующий усилитель и датчик разгрузки ковшей f 2.
Недостаток известного устройства заключается в том, что машинисту экскаватора для обеспечения максимальнрй производительности необходимо постоянно корректировать скорость в зависимости, например, от влажнос10ти грунта, температуры и т.д., что услохсняет управление и приводит к недоиспользованию экскаватора по производительности.
Целью изобретения является упро15щение управления приводом роторного экскаватора.
Поставленная цель достигается тем, что устройство снабжено экстремальным регулятором производительнос20ти, HHTerpiaTopoM, элементом сравнения и датчиком производительности, причем выходы последнего и датчика разгрузки ковшей подключены к экстремальнсялу регулятору производительнос25ти, выход которого соединен с входом суммирующего усилителя, второй вход которого соединен с задатчиком скорости, а выход через интегратор подключен к входу элемента сравнения,
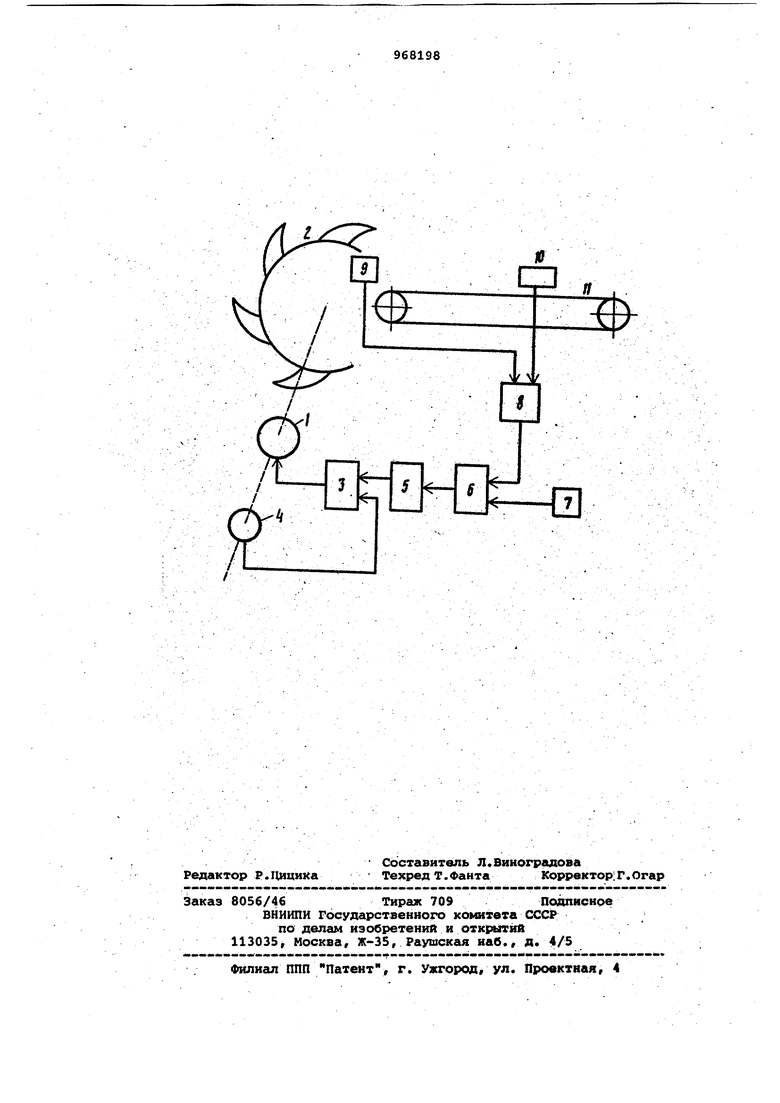
30 к второму входу которого подсоединен датчик скорости колеса, а выход элемента сравнения подключен к приводу роторного колеса. На чертеже приведена функциональная схема устройства для управления приводом роторного колеса экскаватора. . Привод 1 роторного колеса 2 экскаватора подсоединен к устройству 3 сравнения, входы которого соединены с датчиком 4 скорости колеса и интегратором 5, своим входом соединенного с суммирхтощим усилителем б, входы которого подключены к задатчику 7 скорости и экстремальному регулятору 8 производительности, один и второй входы которого подсоединены соответственно к датчику 9 Разгрузки ковшей и датчику 10 производительности приемного конвейера 11 Устройство работает следующим образом. Скорость привода 1 роторного коле са 2 з.адается посредством сигнала от задатчика 7 скорости из расчета обеспечения максимальной производительности. При максимальной заданной скорости и проектной сыпучести породы она полностью разгружается из ков шей,, обеспечивая максимально возможную производительность, которая контролируется датчиком 10 производи тельности , установленным на приемном конвейере 11. Выходной сигнал датчика производительности поступает на вход экстремального регулятора 8, под действием которого на его выходе сигнал отсутствует, так как он настроен на максимальную производительность. В связи с тем, что порода из -ковшей в данной ситуации разгружа ется полностью и не пересыпается на датчик 9 разгрузки, установленный в приемно-питаюиюм устройстве колеса на его выходе сигнал отсутствует, вследствие чего скорость привода роторного колеса будет соответствовать заданной величине, которая контролируется датчиком 4 скорости. При изменении физико-механических свойств экскавируемой породы, например при увеличении влажности, уменьшается ее.текучесть и происходит налипание материала внутри козшей роторного колеса, неполная их разгру кЯг что обуславливает снижение производительности экскаватора и уменьшение сигнала датчика 10 производительности. Налипшая и неразгрузившая ся из ковшей порода при заданной ско рости выпадает из них за местом разгрузки и воздействует на датчик 9 . разгрузки, в результате чего на его выходе возникает сигнал, который совместно с сигналом от датчика производительности поступает на вход экстремального регулятора 8 осуществляющий под их действием поиск максимально возможной производительности. После отыскания максимального значения производительности в данной ситуации на выходе экстремального регулятора 8 формируется соответствующий сигнал, который поступает на вход .суммирующего усилителя 6 в противофазе с сигналом задатчика 7 скорости, в результате чего результирующий сигнал на выходе усилителя б уменьшится. Выходной сигнал суммирующего усилителя интегрируется в блоке 5, поступает на .вход элемента 3 сравнения и вычитается в нем из величины сигнала текущей (Фактической) скорости, поступающего от датчика 4 скорости, в результате чего уменьшается входной сигнал, поступающий на привод 1 роторного колеса. Под действием этого сигнала снижается скорость привода и роторного колеса. Центробежная сила на роторном колесе при снижении скорости уменьшается до величины, при которой руда из ковшей разгружается полностью при данной-влажности, обеспечивая , максимально возможную производительность экскават -ора. Автоматическое регулирование скорости привода роторного колеса позволяет повысить производительность экскаватора, что достигается применением оптимального регулирования скорости вращения роторного колеса. Формула изобретения Устройство для управления приводом poTopHOJX колеса экскаватора, включающее привод роторного колеса, задатчик и датчик скорости колеса, суммирующий усилитель и датчик разгрузки ковшей, отличающеес я тем, что, с целью упрощения управлением роторным экскаватором, оно -снабжено экстремальным регулятором производительности, интегратором, элементом сравнения и датчиком производительности, причем выходы последнего и датчика разгрузки ковшей подключены к экстремальному регулятору производи1;ельности, выход которого соединен с входом суммирующего усилителя, второй вход которого соединен с задатчиком скорости, а выход через интегратор подключен к входу элемента сравнения, к второму входу которого подсоединен датчик скорости колеса, а выход элемента сравнения подключен к приводу роторного колеса. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР .04333, кл. Е 02 F 3/26, 1971. 2.Авторское свидетельство СССР №433274, КЛ; Е О F 3/26, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления роторным экскаватором | 1988 |
|
SU1567726A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| Устройство для автоматического управления роторным экскаватором | 1977 |
|
SU740904A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЬ[М ЭКСКАВАТОРОМ | 1971 |
|
SU304333A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU302444A1 |
| Устройство для учета и контроля работы экскаватора | 1979 |
|
SU872668A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для управления движением ковша-драглайна | 1979 |
|
SU897968A1 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |