Изобретение относится к средствам автоматизации производственных процессов и может применяться при управлении процессом копания роторных экскаваторов.
Известно устройство для автоматического управления роторным экскаватором, включающее задатчик производительности, суммирующий элемент, датчики производительности и нагрузки привода ротора и механизм определения удельной энергоемкости.
С целью регулирования производительности в предлагаемом устройстве вход суммирующего элемента соединен с выходом установленного в устройстве делительного механизма, входы которого, в свою очередь, связаны с датчиком нагрузки привода ротора посредством фильтра и выходом механизма определения удельной энергоемкости.
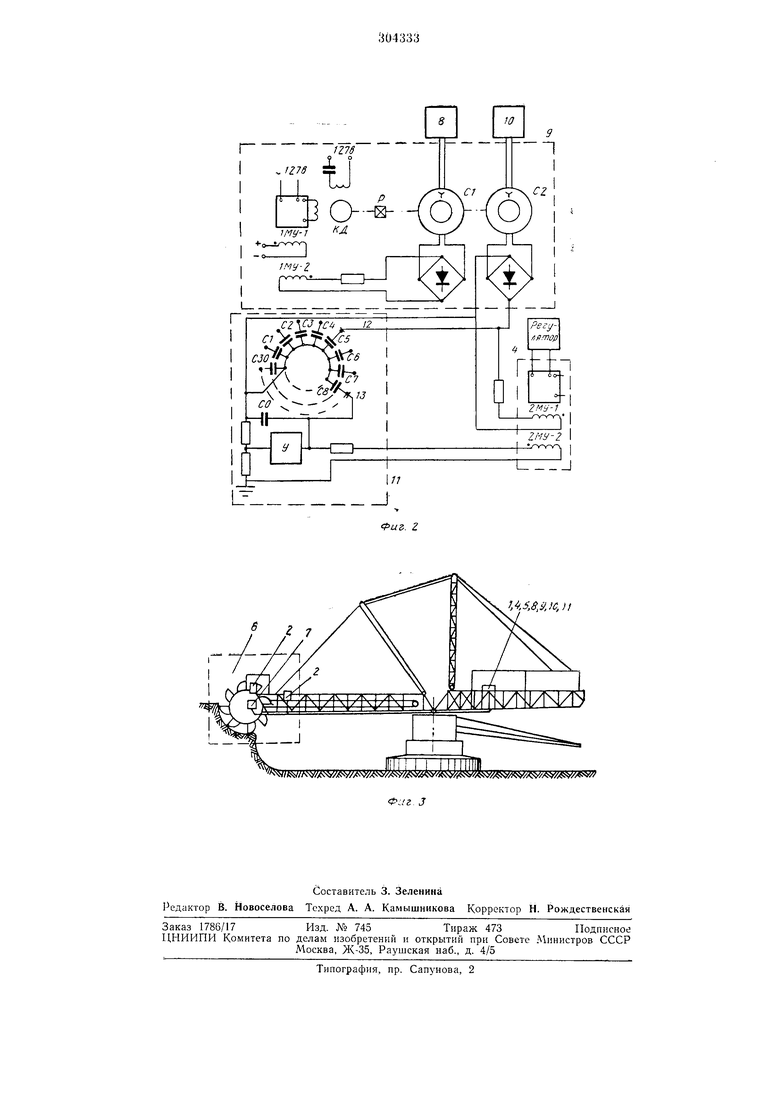
Иа фиг. 1 изображена блок-схема устройства автоматического регулирования производительности роторного экскаватора; на фиг. 2 - то же, принципиальная схема блока делительного механизма и блока запаздывания; на фиг. 3 - схема установки элементов предлагаемого устройства на роторном экскаваторе.
Входы суммирующего элемента I соединены с задатчиком производительности 2, датчиком 3 производительности и суммирующим элементом 4. Выход суммирующего элеменга
связан со входом регулятора 5, выход которого соединен с объектом 6 регулирования, состоящего из электромеханических устройств приводов ротора и поворота экскаватора, взаимодействующих через экскавируемую породу, и части конвейерной линии до датчика 3 производительности. Выходы объекта 6 регулирования соединены с датчиками и 7 производительности и нагрузки привода ротора,
выходы которых связаны со входами механизма 8 определения удельной энергоемкости копания, а выход последнего - с одним из входов блока 9 делительного механизма. Другой вход блока 9 соединен через фильтр 10 с датчиком нагрузки привода ротора и выход с одним из входов суммирующего элемента 4 непосредственно, а с другим - через блок // запаздывания. Устройство автоматического регулирования
производительности роторного экскаватора работает следующим образом.
Для согласования сигналов в главной и дополнительной обратной связи в механизме 8 определения удельной энергоемкости копания
производится деление за онределенный нромежуток времени усредненных значений энергоемкости процесса копания на производительность экскаватора, осуществляемое с временным сдвигом, соответствующим времени заводительности. Текущее значение нагрузки привода ротора делится в блоке 9 на результаты вычисления в механизме 8. С выхода блока 9 подается на суммируюн ий элемент 4 один сигнал непосредственно, а другой - через блок // запаздывания. При этом указанные сигналы но величине равны результату деления в блоке 9 и нротивоноложны по зпаку. Таким образом, сигнал в контуре дополннтельной обратной связи формируется только при возникновении сигнала ошибки в течении времени, равного времени траиспортного запаздывания, вносимому в устройство объектом б регулирования и действует до тех пор, пока не появится новый сигнал главной обратной связи от датчика 3 нроизводительпости. Тем сал1ым доиолпительная обратная связь как бы предсказывает какой сигнал появится со временем на выходе датчика производительности.
Блок делительного механизма состоит из дифференциальнбго магнитного усилителя 1МУ и конденсаторного электродвигателя КД типа РД-09, кинематически связанного через редуктор Р с дву.мя сельсинами Ci и Cj.
Си1нал с выхода механизма 8 оиределсння удельной энергоемкости через сельсин Ci поступает на обмотку управления 1МУ-2 и срацнивается с постоянным сигналом в обмотке 1МУ-1.
Напряжение рассогласования отрабатывается конденсаторным электродвигателем КДПри этом сельсины Ci и С-2 новорачиваются до тех пор, пока ие сравпиваются ампервитки в указанных обмотках. В результате поворота осуа1,ествляется деление сигнала с выхода фильтра 10 на сигнал, пропорциональный удельной энергоемкости породы копания, шлчисленпый механизм 8.
Фильтр 10 представляет собой интегрирующий магнитный усилитель с нримененпым напряжением на нагрузке, постоянная времени которого подбирается при наладке.
Блок // запаздывания выполнен на заномина1О1цих конденсаторах Сь Са . . . . , подключенных к кольцевым коммутаторам шагового искателя ШИ, имеющего два скользящих контакта для записи и считывания. Время запаздывания, равное интервалу времени между моментами прохождения одних и тех же
ламелей П1еткалги 12 и 13, определяется скоростью врангення пгеток и углом между щетка.ми. При считывании заноминаюнгие конденсаторы поочередно подключаются в цепь обратной связи операционного усилителя параллельпо конденсатору Со, емкость которого значительно меньше емкости запоминающего конденсатора, изменяя выходной сигнал усилителя. В предлагаемом устройстве могут быть использованы блоки запаздывания с применением магнитной записи.
Выходной сигнал блока 11 запаздывания подается па вход суммирующего элемента 4, выполпепного, например, па магнитном усилителе 2Л1У.
Предмет изобретения
Устройство для автоматического управлеНИИ роторным экскаватором, включающее задатчик нроизводительности, суммирующий элемент, датчики производительности и нагрузки привода ротора и механизм определе1п- я удельной энергоемкости, отличающееся тем, что, с целью регулирования производительпости, вход суммирующего элемента соединен с выходом установленного в устройстве делительного механизма, входы которого связаны с датчиком нагрузки привода ротора ||осредством фильтра и выходом механизма определе П1я удельной энергоемкости.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU302444A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| Устройство для управления приводом роторного колеса экскаватора | 1980 |
|
SU968198A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| Устройство для автоматического управления роторным экскаватором | 1984 |
|
SU1221280A2 |
| УСТРОЙСТВО для КОНТРОЛЯ РЕЖИМА РАБОТЫ МАШИН | 1971 |
|
SU290993A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДОМ ПОВОРОТА РОТОРНОГО ЭКСКАВАТОРА | 1973 |
|
SU368375A1 |
Wy-7
/«W/A WA W y/WSWW«yKC JX Jyi W
,8,i,lC,)
Риг. 3
