(54) ВИБРАЦИОННЫЙ КОНВЕЙЕР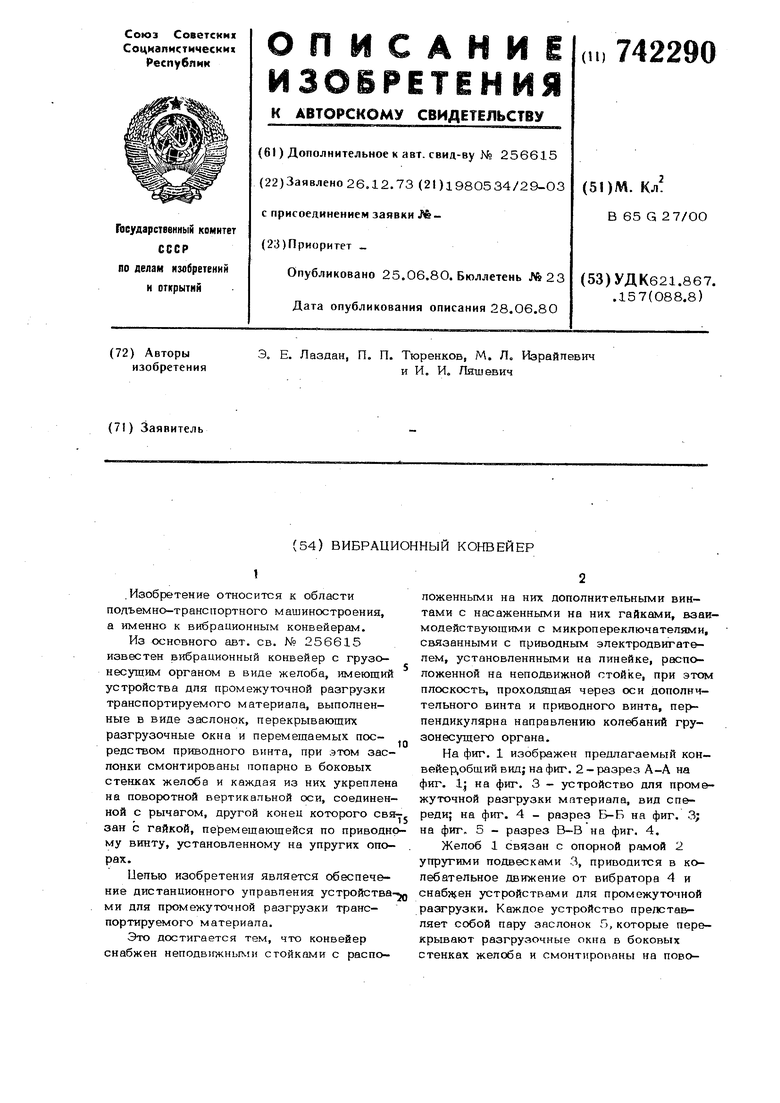
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОМЕЖУТОЧНОЙ РАЗГРУЗКИ ВИБРАЦИОННОГО КОНВЕЙЕРА | 1971 |
|
SU303256A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР ДЛЯ УВЕЛИЧЕННЫХ УГЛОВ НАКЛОНА | 2011 |
|
RU2458839C1 |
| ВЕРТИКАЛЬНЫЙ ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1967 |
|
SU195365A1 |
| аЦЬСиЮоНАЯ | 1973 |
|
SU373229A1 |
| Вибрационный конвейер | 1977 |
|
SU735511A1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| Грузонесущий орган вибрационногоКОНВЕйЕРА | 1979 |
|
SU846439A1 |
| Вибрационный конвейер для транспортирования и дробеочистной обработки отливок | 1980 |
|
SU948802A1 |
| Вибрационный конвейер | 2016 |
|
RU2617306C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2394743C1 |
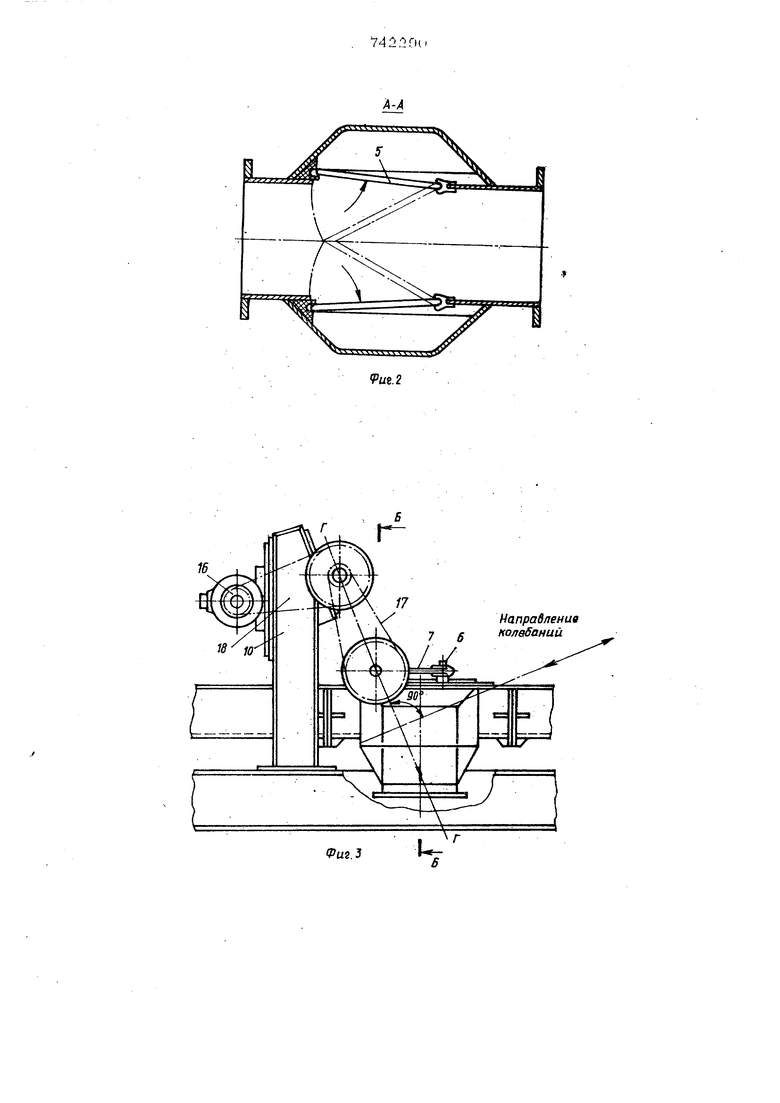
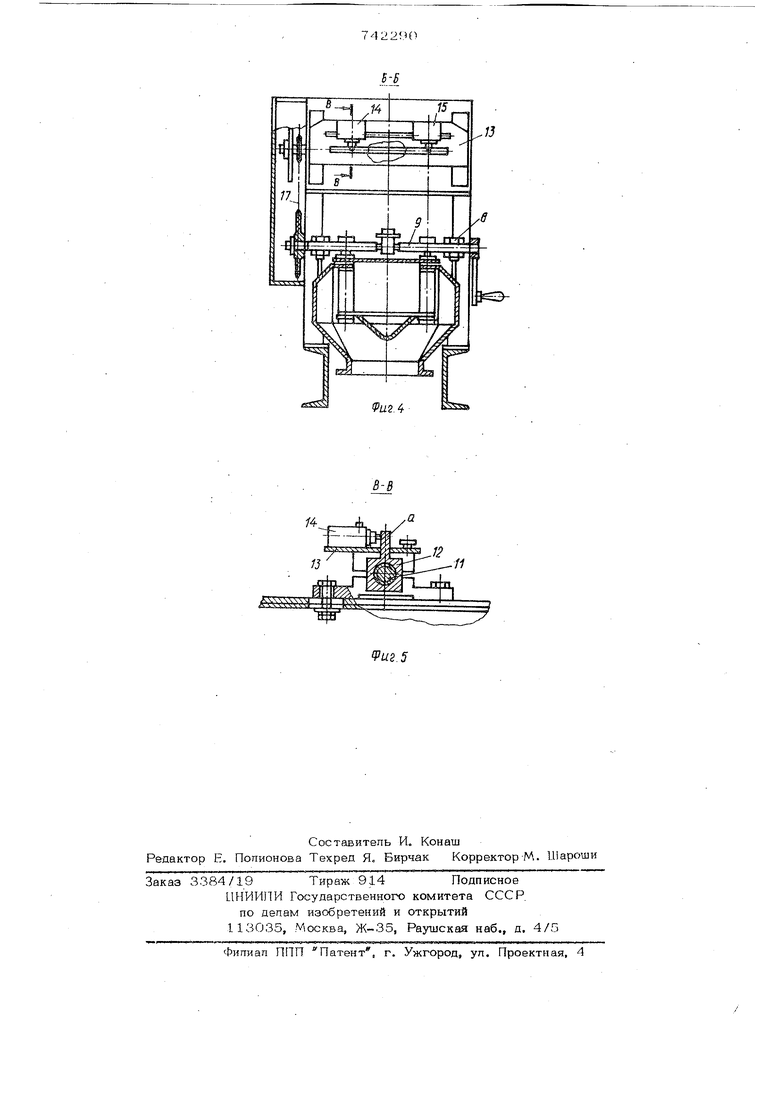
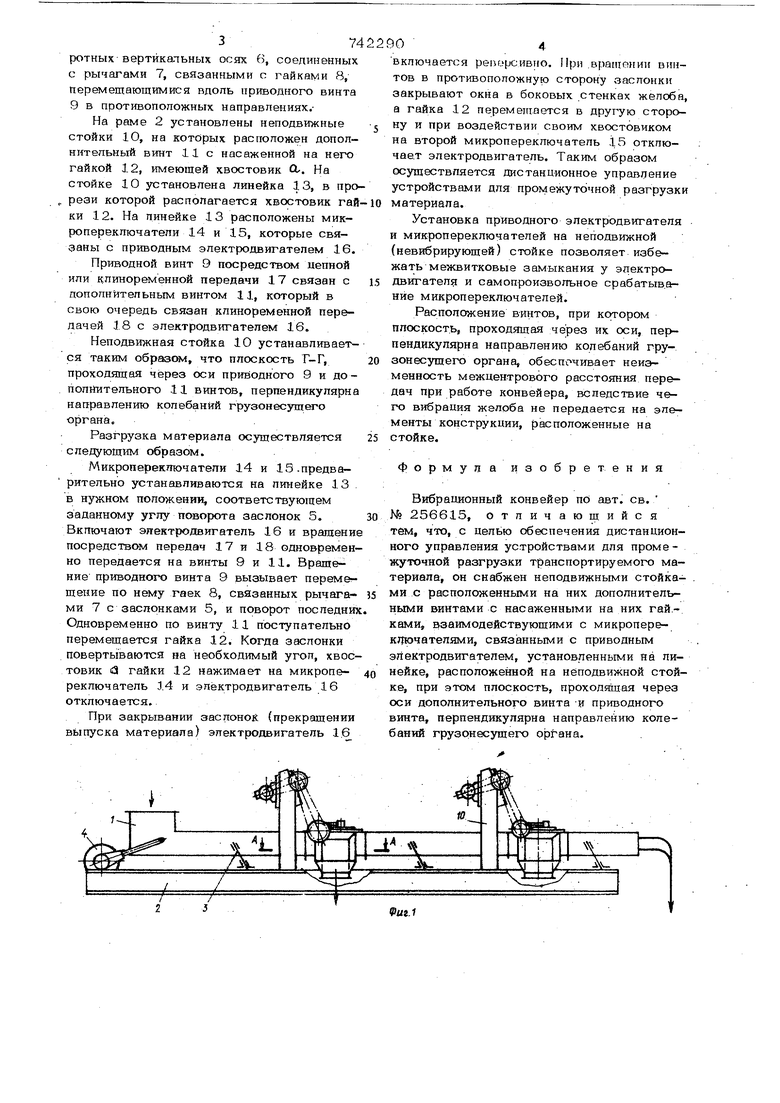
.Изобретение относится к области подъемно-транспортного машиностроения, а именно к вибрационным конвейерам. Из основного авт. св. N° 256615 известен вибрационный конвейер с грузонесущим органом в виде желоба, имеющий устройства для промежуточной разгрузки транспортируемого материала, выполненные в виде заслонок, перекрывающих разгрузочные окна и перемещаемых посредством приводного винта, при этом заспонки смонтированы попарно в боковых стенках желоба и каждая из них укреплен на поворотной вертикальной оси, соединен ной с рычагом, другой коней которого свя зан с гайкой, перемещающейся по приводн му винту, установленному на упругих опорах. Цепью изобретения является обеспечение дистанционного управления устройства ми для промежуточной разгрузки транспортируемого материала. Это достигается тем, что конвейер снабжен неподв11жньгми стойками с расположенными на них дополнительными винтами с насаженными на них гайками, взаимодействующими с микропереключателями, связанными с приводным электродвигателем, установленнными на линейке, расположенной на неподвижной стойке, при этом плоскость, проходящая через оси дополнительного винта и приводного винта, перпендикулярна направлению колебаний грузонесущего органа. На фиг. 1 изображен предлагаемый кон- вейер,общкй вид; на фиг. 2 - разрез А-А на фиг. Ij на фиг. 3 - устройство для промежуточной разгрузки материала, вид спереди; на фиг. 4 - разрез Ез-Б на фиг. 3; на фиг. 5 - разрез 13-В на фиг. 4. Желоб 1 связан с опорной рамой 2 упругими подвесками 3, приводится в копебатепьное движение от вибратора 4 и снабн$ен устройствами для промежуточной разгрузки. Каждое устройство представляет собой пару заслонок 5, которые перекрывают разгрухзочкые окна в боковых стенках желоба и смонтированы на поворотных вертикальных осях 6, соединенных с рычагами 7, связанными с гайками 8, перемещающимися вдопь нриводного винта 9 в противоположных направлениях,На раме 2 установпены неподвижные стойки 1О, на которых расположен дополнительный винт 11с насаженной на него гайкой 12, имеющей хвостовик О-. На стойке 10 установлена линейка 13, в прорези которой располагается хвостовик гай ки 12. На линейке 13 расположены микропереключатели 14 и 15, которые связаны с приводным электродвигателем 16.
Приводной винт 9 посредством цепной или клиноременной передачи 17 связан с дополнительным винтом 11, который в свою очередь связан клиноременной передачей 18 с электродвигателем 16.
Неподвижная стойка 10 устанавливается таким образом, что плоскость Г-Г, проходящая через оси приводного 9 и дополнительного 11 винтов, перпендикулярна направлению колебаний грузонесущего органа.
Разгрузка материала осуществляется следующим образом.
Микроперекшочатепи 14 и 15.предварительно устанавливаются на линейке 13 в нужном положении, соответствующем заданному углу поворота заслонок 5.
Включают электродвигатепь 16 и вращение посредством передач 17 и 18 одновременно передается на винты 9 и 11. Враще ние приводного винта 9 вызывает переметщение по нему гаек 8, связанных рычагами 7 с заслонками 5, и поворот последних Одновременно по винту 11 поступательно перемешается гайка 12. Когда заслонки повертываются на необходимый угол, хвостовик id гайки 12 нажимает на микропереключатель 3.4 и эпёктродвигатель 16 отключается.
При закрывании заслонок (прекращении выпуска материала) электродвигатель 1.6
включается peIи.я::ивIlo, При .врашении винтов в противоположную сторону заслонки закрывают окна в боковых стенках желоба а гайка 12 перемепшется в другую сторону и при воздействии своим хвостовиком на второй микропереключатель 15 отключает электродвигатель. Таким образом осуществляется дистанционное управление устройствами для промежуточной разгрузк материала.
Установка приводного электродвигателя и микропереключателей на неподвижной {невибрирующей) стойке позволяет избежать межвитковые замыкания у электродвигателя и самопроизвольное срабатыв.анйе микропереключателей.
Расположение в-интов, при котором ппоскост.ь, проходящая через их оси, перпендикулярна направлению колебаний грузонесущего органа, обеспечивает неизменность междентрОБОго расстояния передач при работе конвейера, вследствие чего вибрация жалоба не передается на элементы конструкции, расположенные на стойке.
Формула изобретения
Вибрационный конвейер по авт. св. № 256615, отличающийся тем, что, с делью обеспечения дистанционного управления ус.тройствами для промежуточной разгрузки транспортируемого материала, он снабжен неподвижными стойками с расположенными на них дополнительHbHviH винтами с насаженными на них гай.ками, эзаимодействующими с микроперек |ючателями, связанными с приводным электродвигателем, установленными на линейке, расположенной на неподвижной стойке, при этом плоскость, проходящая через оси дополнительного винта -и приводного винта, перпендикулярна направлению колебаний грузонесущего органа.
16
ГНаправлениеколебаний
