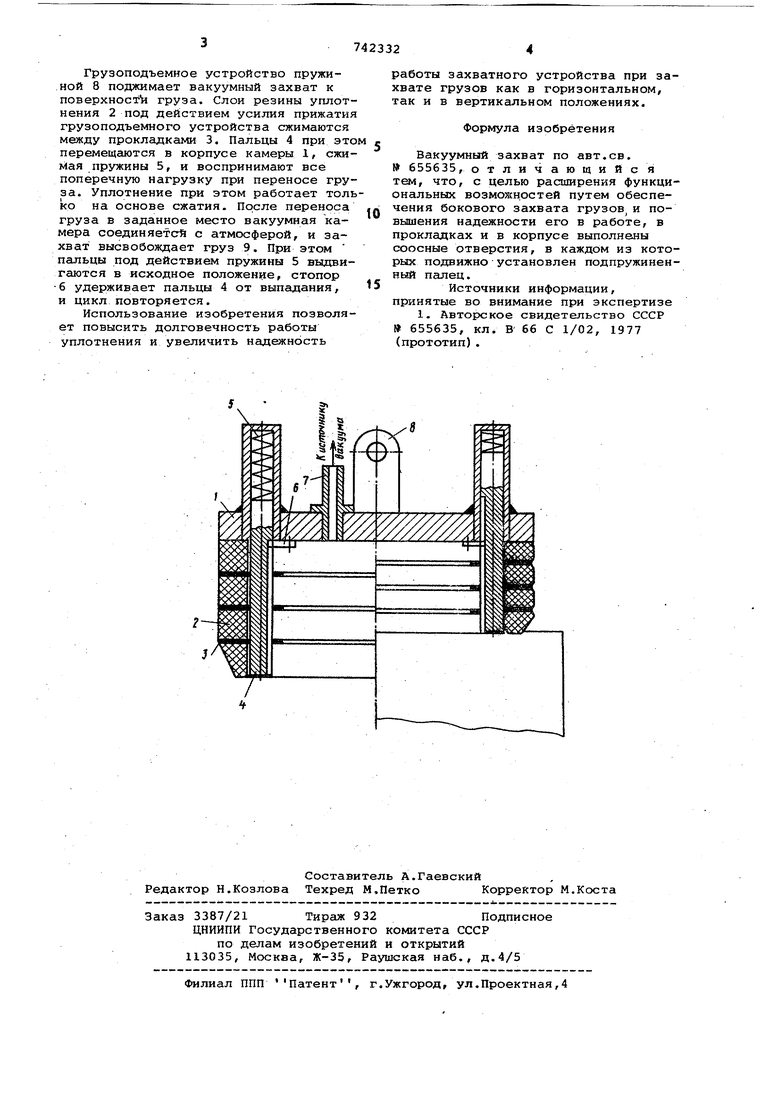
Изобретение относится к грузозахватным устройствам и может быть использовано в огнеупорной промышленности для перекладки и кантования огнеупорных узделий, а также в других областях, где требуется перенос с кантовкой штучных грузов как с плоской, так и с криволинейной поверхностью. Из основного .авт.св. 655635, известен вакуумный захват, состоящий из нескольких колец, расположенных одно под другим, между которыми уста новлены упругие прокладки, при этом высота уплотнения от 1,5 до 5 раз превышает ширину колец. Такое конструктивное выполнение вакуумзахватно устройства позволяет захватывать груз с большой кривизной и шероховатостьюСС. Однако известное вакуумное захват ное устройство не обеспечивает надежность уплотнения при захвате изделия за боковую поверхность или при кантовании изделия на 9СР в вертикаль ной плоскости, так как под действием касательной составляющей сил отрыва слои резины с прокладками сдвигаютс параллельно плоскости захвата груза что приводит к расслоению уплотнения и преждевременному выходу его из строя. Цель изобретения - расширение функциональных возможностей захвата и повышение его надежности в работе. Поставленная цель достигается тем, что в прокладках и в корпусе выполнены соосные отверстия, в каждом из которых установлен подпружиненный палец. На чертеже представлен вакуумный захват в разрезе. Устройство содержит корпус вакуумной камеры 1, уплотнение. 2, состоящее из слоев резины и прокладок 3, пальцы 4, установленные по диаметру в отверстиях корпуса камеры 1 перпендикулярно плоскости захвата с возможностью перемещения и прохождения через отверстия в прокладках 3, пружины 5 и стопоры 6, удерживающие кольца от выпадания. Вакуумная камера 1 соединена с источником вакуума через патрубок 7. Для соединения с грузоподъемным механизмом (на чертеже не показано) на корпусе закреплена пружина 8. Захват работает следующим образом. Грузоподъемное устройство пружиной 8 поджимает вакуумный захват к поверхности груза. Слои резины уплотнения 2 под действием усилия прижатия грузоподъемного устройства сжимаются между прокладками 3. Пальцы 4 при это перемещаются в корпусе камеры 1, сжимая пружины 5, и воспринимают все поперечную нагрузку при переносе груза. Уплотнение при этом работает толь ко на основе сжатия. После переноса груза в заданное место вакуумная камера соединяете с атмосферой, и захват высвобождает груз 9. При этом пальцы под действием пружины 5 выдвигаются в исходное положение, стопор 6 удерживает пальцы 4 от выпадания, и цикл повторяется. Использование изобретения позволяет повысить долговечность работы уплотнения и увеличить надежность работы захватного устройства при захвате грузов как в горизонтальном, так и в вертикальном положениях. Формула изобретения Вакуумный захват по авт.св. 655635, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения бокового захвата грузов, и повышения надежности его в работе, в прокладках и в корпусе выполнены соосные отверстия, в каждом из которых подвижноустановлен подпружиненный палец. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 655635, кл. В 66 С 1/02, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1977 |
|
SU655635A1 |
| Захват-кантователь | 1987 |
|
SU1498693A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Захват-кантователь для грузов цилиндрической формы с центральным отверстием | 1989 |
|
SU1668272A1 |
| Манипулятор для нанесения огнеупорных покрытий при изготовлении крупногабаритных литейных форм по выплавляемым моделям | 1983 |
|
SU1180150A1 |
| Рым-болт | 1982 |
|
SU1062170A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ | 2008 |
|
RU2376236C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Захват-кантователь | 1980 |
|
SU889591A2 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ШТУЧНЫХ ГРУЗОВ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1990 |
|
RU2013344C1 |
