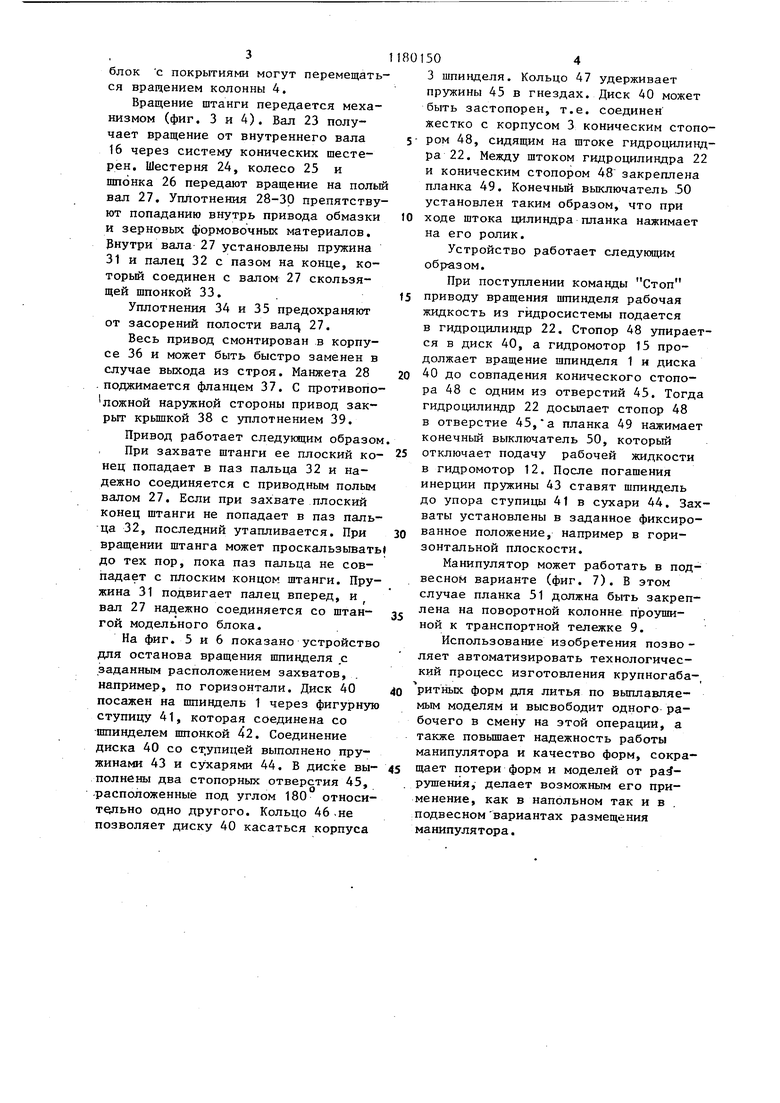
11 Изобретение относится к литейному производству, а именно к средствам механизации и автоматизации технологических процессов при изготовлении крупногабаритных форм по выплавляемым моделям. Цель изобретения - автоматически останов шпинделя в фиксированном положении, надёжная передача вращения от привод а Ж-образного зажима к .йтан1 е модельного блЪка, а также перестройка «анипулИтора из напольн го исполнения® подвесное. . , На фиг.,. - 1, манипулятор, в наполАо исйЗгшении, общий вид; на %йТ. 2 - то же, план; на фиг. 3 устройстпо захвата; на фиг. - раз рез А-А на фиг. 3; на фиг. 5 - узел I на фиг. 1; на фиг. 6 - разрез В-Б на фиг. 5; на фиг. 7 - манипулятор в подвесном исполнении. Манипулятор содержит шпиндель 1 с П-образным захватом 2. Шпиндель вмонтирован в корпус 3, которьй своими цапфами он лежит в подшипниках на поворотной колонне 4, вра.щающейся на пятке 5. Вращение колонны осуществляет гидромотор 6 через шестерни 7 и 8. Пятка закреплена на транспортной тележке 9, имеющей гидравлический привод. Шпиндель и колон на с пяткой закрыты кожухами 10 и 11. Шпиндель приводится -во вращение гидромотором 12 через шестерни 13 и 14. Штанга модельного блока относительно своей оси вращается от гидромотора 15 внутренним валом 16; Гвдроцилиндр 17 зажимает штангу мот дельного блока и раскрывает захваты через втулки 18 и 19. Регулировка захвата производится рычагами 20. Шпиндель наклоняется и поднимается гидроцилиндром 21. Гидроцилиндр 22 стопорит вращение шпинделя в заданно фиксированном положении. Манипулятор работает следующим образом. Перемещаясь по напольным рельсам с разведенными захватами, манипулято подходит к блоку, установленному в призмах таким образом, что свободн концы штанги модельного блока располагаются в створе захватов 2 шпинделя 1, Срабатывает гидроцилиндр 21, и после совмещения осей штанги и захва тов гидроцилиндр 17 сводит захваты, которые за.жимают штангу-с модельным блоком. Обратным ходом гйдроцилиндра 02 21 блок снимается с призм. Включается привод перемещения тележки, манипулятор устат авливается над ванной с огнеупорной суспензией. Гйдромотор 15 приводит во вращательное движение штангу модельного блока. Вращающийся вокруг оси штанги модельный блок с помощью гидроцилиндра 21 наклоняется и погружается в огнеупорную суспензию. Обратным ходом цилиндра блок выводится из ванны обмазки и, не прекращая вращения вокруг оси штанги, приводится во вращение в перпендикулярной плоскости с помощью гидромото.ра 12. Работа манипулятора при обсыпке нанесенного слоя суспензии зерновым формовочным материалом выполняет ся в зависимости от типа пескосьша. При применении пневматического пескосьша после удаления -излишков суспензии из внутренних глухих полостей модели и равномерного распределения слоя суспензии на поверхности выключается вращение шпинделя, и блок ходом тележки перемещается на позицию пескосыпа. Повторяются все движения, происходящие при обмазке модели суспензией. Слой огнеупорного покрытия нанесен. Отключается вращение модели относительно штанги. Манипулятор отходит на позицию передачи блока в камеру сушки непосредственно либо через промежуточное устройство, например, с помощью приводной тележки. В случае использования механического пе.скосыпа блок вводится в рабочую камеру при вращении как штанги модельного блока, так и шпинделя 1. Этим достигаются наилучшие условия для качественного формирования оболочки. После выводи модельного блока из камеры (ванны) пескосыпа отключаются приводы вращения штанги и шпинделя 1. Установ блока в призматические ложементы производится наклоном шпинделя 1 и разведением П-образных захватов 2. В зависимости от компановки линии изготовления форм и взаимодействия .ее со средствами питания модельными блоками и передачи блоков со сформированными на них покрытиями на выплавку моделей, модельньш блок и
3
блок с покрытиями могут перемещаться вращением колонны 4,
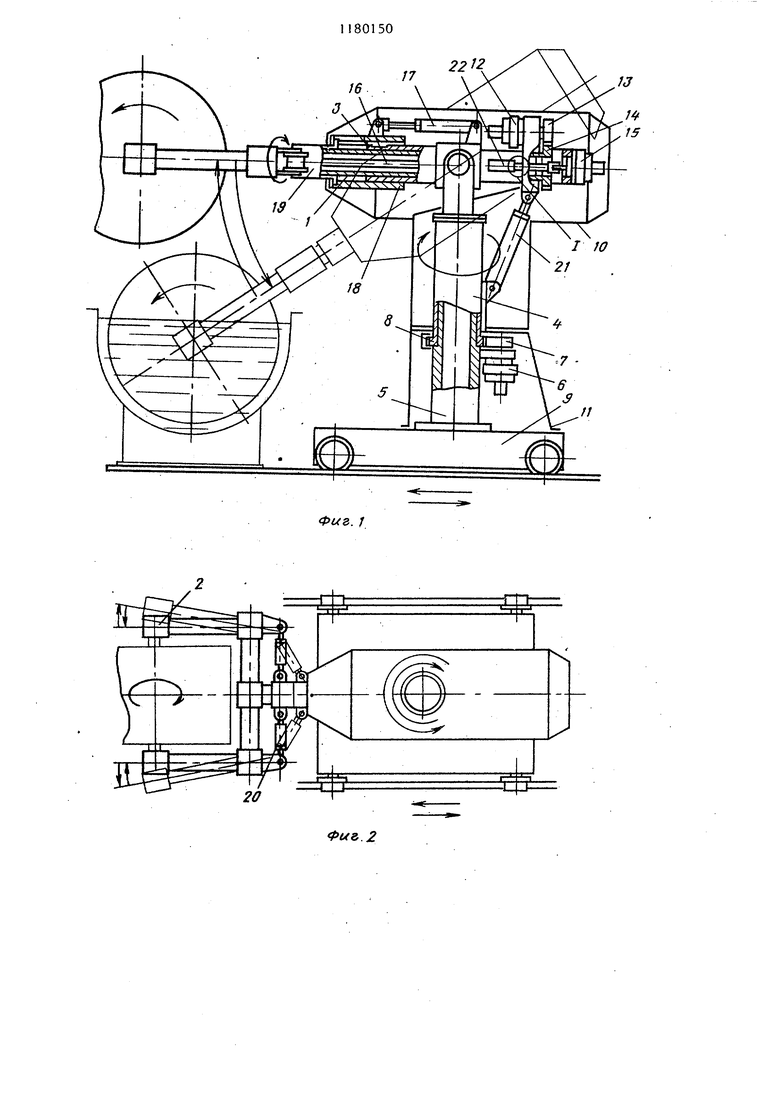
Вращение штанги передается механизмом (фиг. 3 и 4), Вал 23 получает вращение от внутреннего вала 16 через систему конических шестерен. Шестерня 24, колесо 25 и шпонка 26 передают вращение на полый вал 27. Уплотнения 28-30 препятствуют попаданию внутрь привода обмазки и зерновых формовочных материалов. Энутри вала 27 установлены пружина 31 и палец 32 с пазом на конце, который соединен с валом 27 скользящей шпонкой 33.
Уплотнения 34 и 35 предохраняют от засорений полости вал 27.
Весь привод смонтирован в корпусе 36 и может быть быстро заменен в случае выхода из строя. Манжета 28 .поджимается фланцем 37. С противоположной наружной стороны привод закрыт крьш1кой 38 с уплотнением 39.
Привод работает следующим образом
При захвате штанги ее плоский конец попадает в паз пальца 32 и надежно соединяется с приводным полым валом 27. Если при захвате плоский конец штанги не попадает в паз пальца 32, последний утапливается. При вращении штанга может проскальзывать до тех пор, пока паз пальца не совпадает с плоским концом штанги. Пружина 31 подвигает палец вперед, и вал 27 надежно соединяется со штангой модельного блока.
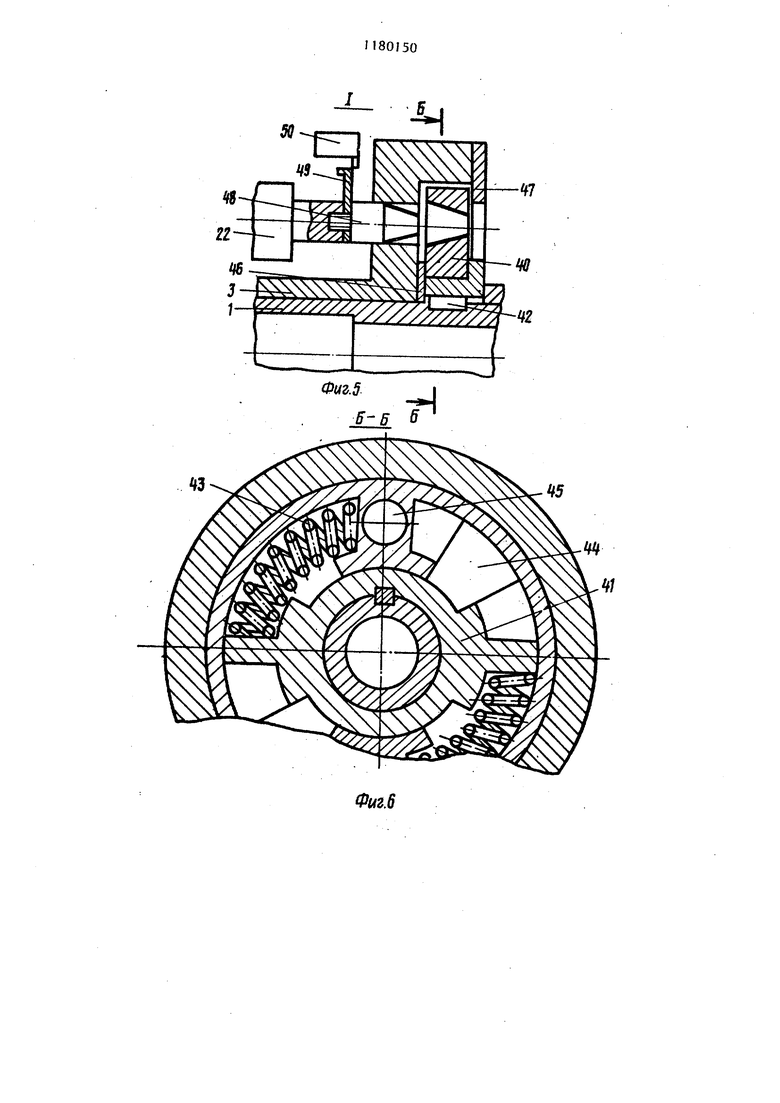
На фиг. 5 и 6 показано устройство для останова вращения шпинделя .с заданным расположением захватов, . например, по горизонтали. Диск 40 посажен на шпиндель 1 через фигурную ступицу 41, которая соединена со -шпинделем шпонкой 42. Соединение диска 40 со ст,упицей выполнено пружинами 43 и сухарями 44. В диске выполнены два стопорных отверстия 45, -расположенные под углом 180 относительно одно другого. Кольцо 46,не позволяет диску 40 касаться корпуса
01504
3 шпинделя. Кольцо 47 удерживает пружины 45 в гнездах. Диск 40 может быть застопорен, т.е. соединен жестко с корпусом 3 коническим стопо5- ром 48, сидящим на штоке гидроцилиндра 22. Между штоком гидроцилиндра 22 и коническим стопором 48 закреплена планка 49. Конечный выключатель .50 установлен таким образом, что при 10 ходе штока цилиндра планка нажимает на его ролик.
Устройство работает следующим образом,
При поступлении команды Стоп t5 приводу вращения шпинделя рабочая жидкость из гидросистемы подается в гидроцилиндр 22. Стопор 48 упирается в диск 40, а гидромотор 15 продолжает вращение шпинделя 1 и диска 0 40 до совпадения конического стопора 48 с одним из отверстий 45. Тогда гидроцилиндр 22 досыпает стопор 48 в отверстие 45,а планка 49 нажимает конечный выключатель 50, который 5 отключает подачу рабочей жидкости в гидромотор 12. После погашения инерции пружины 43 ставят шпиндель до упора ступицы 41 в сухари 44. Захваты установлены в заданное фиксированное положение, например в горизонтальной плоскости.
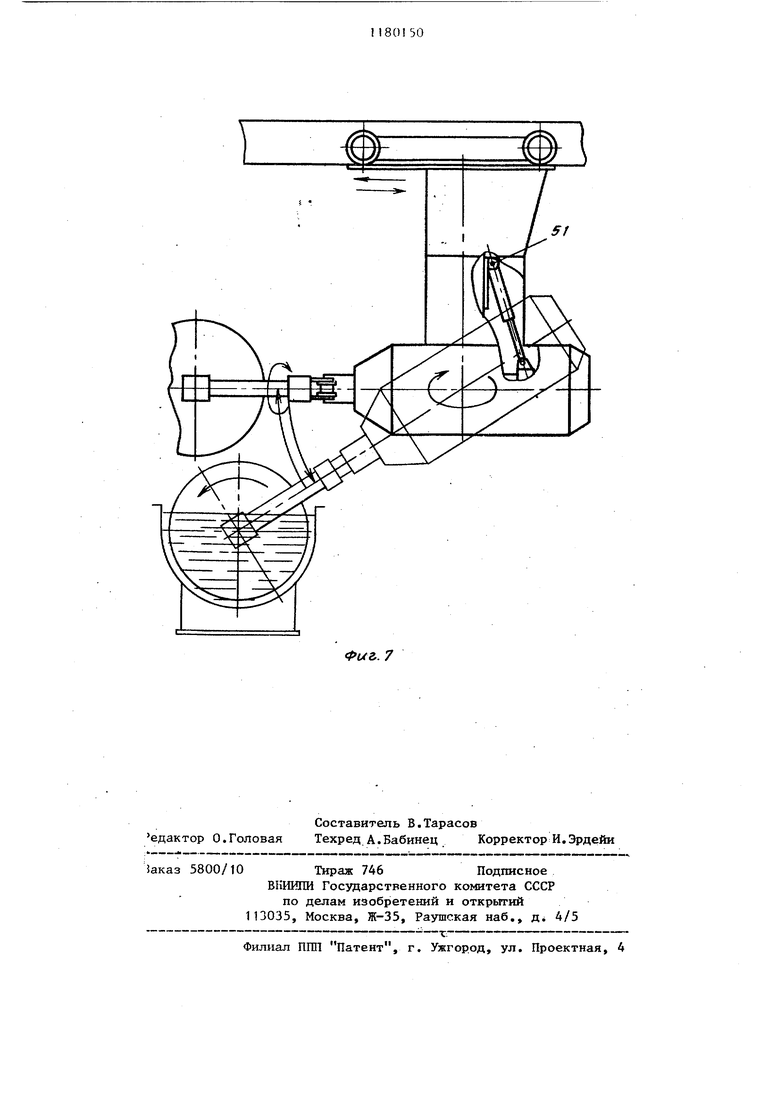
Манипулятор может работать в подвесном варианте (фиг. 7). В этом случае планка 51 должна быть закреплена на поворотной колонне проуши5ной к транспортной тележке 9.
Использование изобретения позво ляет автоматизировать технологический процесс изготовления крупногаба-, 0 битных форм для литья по вьптлавляемым моделям и высвободит одного-рабочего в смену на этой операции, а также повьш1ает надежность работы манипулятора и качество форм, сокращает потери форм и моделей от pad. рушения, делает возможным его применение, как в напольном так и в . подвесном вариантах размещения манипулятора.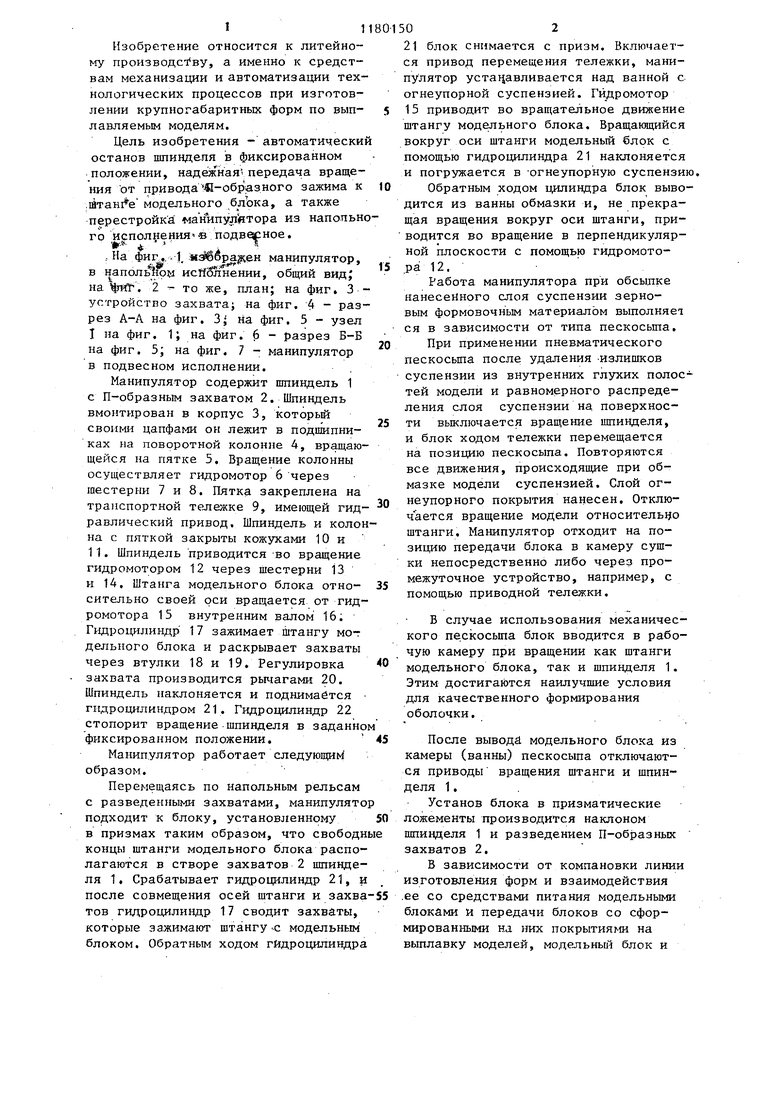
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия изготовленияфОРМ пО ВыплАВляЕМыМ МОдЕляМ | 1979 |
|
SU846102A1 |
| Установка для нанесения огнеупорного покрытия | 1979 |
|
SU865490A1 |
| Установка для нанесения огнеупорного покрытия на модельные блоки | 1985 |
|
SU1284680A1 |
| Установка для изготовления керамических форм | 1976 |
|
SU662245A1 |
| ЙС?СОК}ЗНАЯглТГиз i j^u-'C^rSi', | 1973 |
|
SU378282A1 |
| Манипулятор для нанесения огнеупорных покрытий | 1979 |
|
SU882700A1 |
| Манипулятор для нанесения керамических покрытий на блоки моделей точного литья | 1958 |
|
SU120632A1 |
| Элеваторный пескосып | 1982 |
|
SU1044412A1 |
| Подвесной манипулятор для протяжки моделей и сборки крупногабаритных форм | 1988 |
|
SU1646673A1 |
| Установка для изготовления кера-МичЕСКиХ фОРМ пО ВыплАВляЕМыММОдЕляМ | 1979 |
|
SU839655A1 |
1.МАНИПУЛЯТОР ДЛЯ НАНЕСЕНИЯ ОГНЕУПОРНЫХ ПОКРЫТИЙ ПРИ ИЗГОТОВЛЕНИИ КРУПНОГАБАРИТНЫХ ЛИТЕЙНЫХ ФОРМ ПО ВЫПЛАВЛЯЕМЫМ МОДЕЛЯМ, содержащий транспортную тележку с установленной на ней колонной, которая имеет возможность вращения, и на которой шарнирно закреплен шпиндель с корпусом, несущий П-образный захват с рычажным механизмом для зажима модельного блока, приводы вращения шпинделя вокруг его продольной оси и изменения его углового положения относительно горизонтальной плоскости, отличающийс я тем, что, с целью автоматического останова шпинделя в фиксирован ном положении, манипулятор снабжен диском, ступица которого жестко соединена со шпинделем, а обод диска, в котором.вьшолнены два стопорных отверстия, соединен со ступицей пружинами и сухарями, при этом на корпусе шпинделя размещен пневмопривод с коническим стопором. 2.Манипулятор по п. 1, отличающийся тем, что, с целью надежной передачи вращения от привос 9 да П-образного зажима к штанге модельного блока, установлен подпружисл ненный палец с пазом на торце, а конец шпинделя выполнен соответственно профилю паза. 3.Манипулятор по п. 1, отличающийся тем, что, с целью перестройки его из напольного исполнения в подвесное, он снабжен планкой-проушиной с удлиненным концом, равным длине хода поршня, закреплен00 ной на пневмоприводе изменения уго ел лового положения шпинделя.
Фие. 1
Фиг 4.
| ЙС?СОК}ЗНАЯглТГиз i j^u-'C^rSi', | 0 |
|
SU378282A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Манипулятор для нанесения огнеупорных покрытий | 1979 |
|
SU882700A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
