(54) ПОДЪЕМНИК
1
Изобретение относится к подьемникам, применяемым в мясоперерабатывающей промышленности, и предназначено для загрузки напольными тележками-контейнерами мясного в приемные емкости волчков, куттеров, колбасных шприцев, фаршемешалок и другого технологического оборудования.
Известны подъемники, состоящие из к жаса, грузовой опрокидывающейся платформы, перемещаемой в вертикальной плоскости, и . привода платформы. Причем/грузовая платформа снабжена приспособлением для фиксации напольной тележки, а на каркасе подьемника имеется специальный упор для опрокидывания грузовой платформы. На некоторых подъемниках грузовая платформа выполнена в виде ковша ,для загружаемого сырья Ц.
Недостатками данных подъемников являются ненадежность узлов опрокидывания и их недолговечность.
Наиболее близким: к предлагаемому является подъемник, содержащий стойку и перемешающуюся по ней опрокидную грузовую платформу, механизм фиксации 2.
Недостатки этого подъемника - недостаточная долговечность узла опрокидывания, состоя- , щего из упора и рычага с роликом, в результате постоянного сухото трения под большой нагрузкой. По мере износа упора и ролика снижается надежность работы подьемника и бывают случаи заклинивания системы. Небольшой радиус поворота ролика в упоре вызывает возрастание нагрузки в приводе в момент опрокидывания в 2-3 раза, что затрудняет регулировку системы 1федохранения привода от перегрузок, влечет за собш быстрый износ деталей привода.
Цель изобретения - повышение надежности работы.
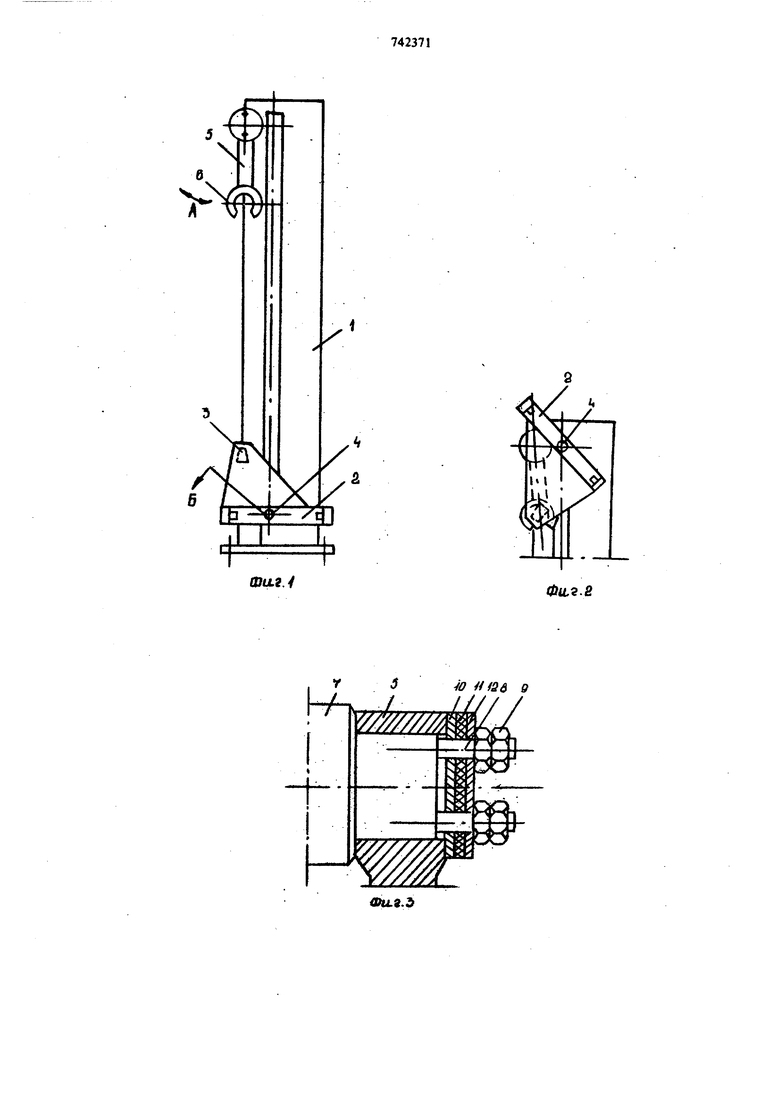
Поставленная цель достигается тем, что механизм фиксации подъемника для груза содерясит маятниковый рычаг с фигурной прорезью, закрепленный на неподвижной оси, а на грузовой платформе смсштирован упориый палец, взаимодействующий с маятниковым рычагом и вьоюцвеяный с криволинейными рабочими поверхностями, повторяющими внутреннюю поверхность оурной прорези. 3 Даже незначительный поворот маятникового рычага относительно упорного пальца при подъ ме грузовой платформы обеспечивает надежное замыкание упорного пальца в прорези маятникового рычага. Крепление маятникового рычага на конце неподвижной оси, прикреплен ной к стойке, при помощи нескольких ишилек с гайками и контргайками и трех специальных шайб, средняя из которых эластична (изготовленная, например, из полиуретана), обеспечивае не только безошибочное попадание упорного пальца в прорезь маятникового рычага, но и плавное опрокидывание грузовой платформы. Процесс опрокидывания грузовой платформы с загруженной сырьем тележкой не вызьгвает резкого увеличения нагрузки в приводе, поскольку в предлагаемом подьемнике расстояние от зева маятникового рычага до оси его вращения имеет значительную величину (примерно 400-500 мм). Эластичная щайба постоянно компенсирует износ шайбы, соприкасающейся с маятниковым рычагсм, и обеспечивает необходимое усилие, гарантирующее надежную и устойчивую работу маятникового рычага (нахождение его в заданном положении). На фиг. 1 изображен подъемникЮбщий вид; на фиг. 2 - грузовая платформа в край нем верхнем положении; на фиг. 3 - узел крепления маятникового рычага к неподвижной оси; на фиг. 4 - упорный палец в момент входа в прорезь маятникового рычага; на фиг. 5 - упорный палец после замыкания в прорези маятникового рычага. Подъемник содержит стойку 1, внутри которой помещен привод, грузовую поворотну платформу 2 с установленным на ней упорным пальцем 3, предназначенным для опрокидывания платформы вокруг оси 4, маятниковый рычаг $, прорезь 6 на маятниковрм рыча ге, неподвижную осЬ 7, закрепленную на стой ке 1, шпильки 8 и гайки 9 для крепления маятникового рычага 5 к оси 7 при помощи шайбы 10, зластичной шайбы 11 буфера и ша бы 12. Привод подъемника и тележка для сырья на чертежах не показаны). Подъемник работает следующим образом. Тележка с сырьем вручную накатывается н грузовую платформу 2 и фиксируется на ней специальньпи приспособлением (на чертеж не приведен). При включении привода на подъем грузовая платформа 2 вместе с тележ : кой начинает подниматься вверх. Дойдя до м никового рычага 5, упорный палец 3 грузовой платформы входит в прорезь 6 рычага 5. Платформа 2, продолжая двигаться, начинает плавно опрокидываться вокруг оси 4, При зт маятниковый рычаг 5 поворачивается относительо неподвижной оси 7 в сторону опрокиды ваняя платформы, обеспечивая равномерный поворот грузовой платформы 2 (направление качания маятникового рычага показано стрелкой А). Упорный палец 3, смещаясь вместе с грузовой платформой, обеспечивает мгновенное замыкание себя в прорези 6, так как палец 3 совместно с платформой 2 поворачивается вокруг оси 4 в сторону вьп-рузки (стрелка Б), обеспечивая относительное встречное вращение пальца 3 и зева 6 (фиг. 5). После опрокидывания грузовой платформы с тележкой на угол естественного откоса сырье под действием собственной массы высыпается в загружаемое технологическое оборудование. Затем срабатывает выключатель и отключается привод. Включением привода на опускание грузовая платформа вместе с порожней тележкой возвращается вниз в исходное положение. Равнснмерностъ и постоянство нагрузок на элементы привода во время подъема груза и в момент его вьп-рузки из транспортной тележки, обеспечиваемые ксиструкцией маятникового рычага, позволяют повысить надежность подъемника в работе и увеличить срок его службы щ}имерно на 35-40%. Предлагаемая конструкция крепления маятникового рычага к оси обеспечивает его надежную работу на протяжении длительного периода времени, так как износ трущихся деталей (щайбы и маятникового рычага) компенсируется зластичной шайбой и может периодически регулироваться гайками. Формула изобретения Подъемник для груза, содержащий стойку и перемещающуюся по ней опрокидную грузовую платформу, механизм фиксации, о т л и ч а-. ю щ и и с я тем, что, с целью повышения надежности работы, механизм фиксации содержит маятниковый рычаг с фигурной прорезью, закрепленный на неподвижной оси, а Щ1 грузовой платформе смонтирован упорный палец, взаимодействующий с маятниковым рычагом и выполненный с криволинейными рабочими поверхностями, повторяющими внутреннюю поверхность фигурной прорези. Источники информации, 1фшитые во внимание при экспертизе 1.Горбатов В. И. н лр. С1фавачннк по оборудованию предприятий мясной промышленности М., Пищевая промышленносп 1965, с. 251- 253. 2.Авторское свидетельство СССР № 308734, кл. В 66 F 11/00, 1970.
Шагу
Фи.У.8
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1980 |
|
SU922016A1 |
| Подъемник | 1979 |
|
SU872449A1 |
| Подъемник для укладки мешков, тюков и т.п. грузов в штабель | 1945 |
|
SU68909A1 |
| Подъемник-опрокидыватель для автомобилей | 1984 |
|
SU1217777A1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2019 |
|
RU2712891C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| Подъемник для разгрузки вагонеток | 1981 |
|
SU958313A1 |
| Боковой опрокидыватель грузовых автомобилей | 1990 |
|
SU1791310A1 |
| УСТРОЙСТВО ДЛЯ СМЕНЫ ПОГЛОЩАЮЩЕГО АППАРАТА | 2008 |
|
RU2392138C2 |
| Тормоз грузовой тележки | 1979 |
|
SU906766A1 |

o //tfd 9
и/.
Фи.г.Ъ
в
