Изобретение относится к строительству, а именно к фундаментостроению, и может быть иоаользовано в устройствах для ударного выштамповывання грунтов под фундаменты зданий и сооружений. Известно навесное оборудование, смонтированное на базовой машине, включающее направляющую ферму и рабочий орган в виде одномассового корпуса с захватным приспособлением и пазами дял направленного прямолинейного движения вдоль этой фермы. Серия ударов, производимых рабочим органом, который движется прямолинейно по направляющей ферме под действием силы тяжести к одной и той же грунтовой площадке, приводит к образованию углубления в форме подощвы с объемом равным объему и площади основания фундамента, с одновременным уплотнением грунта в основании 1 . Однако для обеспечения процесса проникани одномассового рабочего органа в грунтовую сре ду Кудельное статическое давление по подошве корпуса в состоянии покоя должно составлять не менее 0,3 кгс/см, т.е. рабочий орган обладает значительным весом. Это обстоятельство обуславливает повышенную энергию процесса выштамповьшания. Известен многомассовый рабочий орган, содержащий полый корпус с днищем и телескопические инершюнные массы, которые соединены между собой гибкими связями. При подъеме рабочего органа лебедкой базовой машины инершюнные массы посредством гибких связей перемещаются и занимают определенное положение под днищем корпуса 21. Основным недостатком известного рабочего органа является низкая надежность в работе ввиду трения 1шерционных масс о внутренние стенки корпуса. Наиболее близкий к предлагаемому рабочий орган включает корпус с полостью, размещенную в полости и жестко соединенную одним концом с корпусом штангу, смонтированные на ней и соединенные между собой гибкими связями инерционные массы, захватное приспособление. При ударном взаимодействии с грунтом зтого рабочего органа достигается удлинение времени контакта, что обеопочивает прюникание в грунтовую среду на большую глубину при ограниченном весе, если перед ударом между днищем корпуса и инерционными массами имеется зазор. Обеспечение зазора достигается движением рабочего органа по криволинейной траектории 3.
Однако необходимость иметь направляющую ферму криволинейного очертания усложняет копстру сцию навесного оборудования, при движении же по прямолинейной направляющей ферме псд действием сил тяжести известный рабочий орган не обеспечивает подъем инерционных масс на определенную высоту над уровнем днища корпуса перед его ударом о грзтт.
Другой недостаток этого рабочего органа обусловлен иедостаточной надежностью:в работе при внецентренном ударе. Грунтовая площадка для выщтамповьшания зачастую имеет уклоны, перепады по высоте, кроме того грунт может налипать к подощве рабочего органа, что и создает условия для внедентренного удара, при котором происходит перекос инерционных масс, т.е. эффективность проникания резко снижается
Цель изобретения - повышение эффективности работы.
Указанная цель достигается тем, что в рабочем органе оборудования для выиггамповывания гр)штов, включающем корпус с полостью, размещенную в полости и жестко соединенную сщним концом с корпусом щтангу, смонтярованные на ней и соединенные, между собой габкими связями инерционные массы, захватное приспособление, агганга и гпгерционные массь снабжены винтовыми направляющими, вазимодействующими между собой, при этом направляющие штанги образованы по правой и левой винтовыми линиями с равными углами подъема, а направляющие одних инерционных масс вьшо.таеиы по правой винтовой линии, направляющие других инерционных масс - по левой. При этом угол подъема каждой винтовой направляющей составляет 70-88.
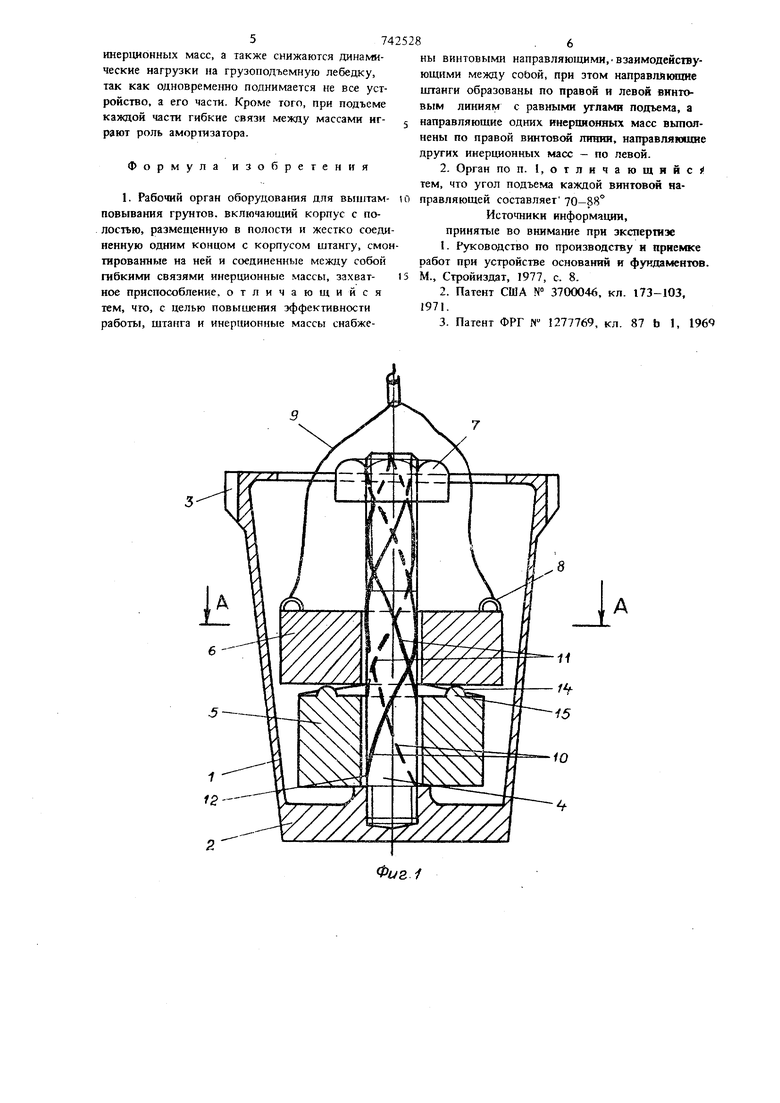
На фиг. 1 схематически изображен рабочий орган, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел на фиг. 2.
Предлагаемый рабочий орган включает корпус 1. с полостью и днищем 2 и пазами дал направленного движения, штангу 4 с инерционными массами 5, 6 и упорной гайкой 7, проушины 8 для крепления подъемного троса Штанга 4 снабжена винтовыми направляющими выполненными по правой 10 и левой 1 винтовыми линиями, а инер1щонные массы 5 н 6 соответственно имеют направляющие, изготовленные по правой 12 и левой )3 винтовым линиям. Массы 5 и 6 соединены .между собой гибкими связями 14, а масса 5 имеет упорны выступы 15 в виде полусфер.
Рабочий орган оборудования для вштамповывания грунта работает следуюицим образом.
С помощью лебедки базовой машины (на чертеже не показана) посредством троса 9, закрепленного к проушинам 8 инерционной массы 6, рабочий орган поднимают на определенную высоту. При подъеме масса 6, двигаясь по винтовым направляюсцмм И, перемещается вдоль штанги 4, пока не упрется своей верхней гранью в угюрную гайку 7. Масса 6 связана с массой 5 гибкими связями 14, поэтому одновременно с подъемом массы 6 происходит также подоем массы 5, которая движется по направляющим 10.
Направляю.иие Ш и П, размешенные на штанге 4, а тшсже направляюш;ке 12 массы 5 и направляющие 13 массы 6 выполняются с большим утлом подъема винтовой линии, равным 70-88, что исключает самоторможение. Направляющие для восприятия динамических нагрузок имеют трапецеидальную форму. Длина гибких связей 14 подбирается так, чтобы не препятствовать перемещению инерционных масс 5 и 6 как Б период удара, так и при их подъеме.
Подняв рабочий орган на требуемую высоту его направленно сбрасывают на грунт. В перио свободного падения устройства массы 5 и 6 находятся в крайнем положении относительно уровня поверхности днища 2. При ударе происходит торможение корпуса 1 с дашщем 2 и жестко соединенной с ним гь-танги 4. Однако под действием сил кнерциг массы 5 и 6 продолжают движение вниз в направлении удара, взаимодействуют со штангой и тем самым удлиняют время контакта, создавая оптимальные условия для максимального проникания рабочего органа в грунт.
Устойчивость плоскопараллельного перемещения рабочего органа при проникании его в грунт обеспечивается тем, что инерционные массы совершают вращательное движение.
Для исключения реактивного вращею1я корпуса I с днищем 2 и соблюдения условий равновесия системы сумма моментов инерционной массы 5 относительно оси вращения равна по вягшчтине и противоположна по знаку сумме моментов инерционной массь 6 относительно той же осн.
При таком вьшолнении рабочего органа повышается эффективность проникания рабочего оргаьи в грунт, так как каждая инерционная масса движется по своей напрлрляющей таким образом исключается их перекос; повьпцается надежность работы при проникании рабочего органа в грунтовую среду за счет устойчиво) плоскопараллельного перемещения, Kf)rc)j)oe обеспечивается вращательными /яиж ииями
инерционных масс, а также снижаются динамические нагрузки на грузоподъемную лебедку, так как одновременно поднимается не вс« устройство, а его части. Кроме того, при подъеме каждой части гибкие связи между массами играют роль амортизатора.
Формула изобретения
1. Рабочий орган оборудования для выштамповывания грунтов, включающий корпус с полостью, размещенную в полости и жестко соединенную одним концом с корпусом штангу, смотированные на ней и соединенные между собой гибкими связями инерционные массы, захватное приспособление, отличающийся тем, что, с целью повышения эффективности работы, штанга и инерционные массы снабжены винтовыми направляю1дими, взаимодействующими между соЬой, при зтом иаправпАкнцие штанги образованы по правой и левой винтовым линиям с равными углами подъема, а направляющие одних инерционных масс вьшолнены по правой винтовсйс ттяи, направляющие других инерционных масс - по левой.
2. Орган по п. I, отличающийся тем, что угол подъема каждой винтовой направляющей составляет 70-88°
Источники информации, принятые во внимание при экспертизе
1.Руководство по производству и приемке работ при устройстве оснований и фукдамеитов. М., Стройиздат, 1977, с. 8.
2.Патент США № 3700046, кл. 173-103, 1971.
3.Патент ФРГ ,Т 1277769, кл. 87 b 1, 1969 А-Л
Фи.2 г/8.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Трамбовка для штампования котлованов | 1982 |
|
SU1079753A1 |
| Рабочий орган для выштамповыванияКОТлОВАНОВ | 1979 |
|
SU837996A1 |
| Рабочий орган для образования котлованов | 1982 |
|
SU1084366A1 |
| Рабочий орган для выштамповывания котлованов | 1983 |
|
SU1090801A2 |
| Рабочий орган динамического образова-Ния КОТлОВАНА | 1979 |
|
SU802491A1 |
| Рабочий орган для вытрамбовыванияКОТлОВАНОВ | 1979 |
|
SU802492A1 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ ГРУНТА | 1998 |
|
RU2147642C1 |
| Рабочий орган для уплотнения грунтов | 1981 |
|
SU953090A1 |
| Способ выштамповывания котлована | 1979 |
|
SU850810A1 |
| Навесное оборудование для вытрамбовывания котлованов | 1978 |
|
SU791843A1 |

