(54) РАБОЧИЙ ОРГАН ДЛЯ ДИНАМИЧЕСКОГО ОБРАЗОВАНИЯ
КОТЛОВАНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Трамбовка для штампования котлованов | 1982 |
|
SU1079753A1 |
| Рабочий орган для вытрамбовыванияКОТлОВАНОВ | 1979 |
|
SU802492A1 |
| Рабочий орган для выштамповыванияКОТлОВАНОВ | 1979 |
|
SU837996A1 |
| Рабочий орган для образования котлованов | 1982 |
|
SU1084366A1 |
| Рабочий орган для выштамповывания котлованов | 1983 |
|
SU1090801A2 |
| Рабочий орган оборудования для выштамповывания грунтов | 1978 |
|
SU742528A1 |
| Устройство для вытрамбовывания котлованов | 1982 |
|
SU1040040A1 |
| Устройство для вытрамбовывания котлованов | 1990 |
|
SU1756458A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2012 |
|
RU2501930C2 |
| Трамбовка для вытрамбовывания котлованов | 1982 |
|
SU1172995A1 |
t
Изобретение относится к области строительства, а именно к устройствам для образования котлованов без выемки грунта под фундаменты и сооружения.
Известно оборудование для динамического образования котлована с рабочим органом, представляющим собой одномассовый ударник с вертикальным отверстием для выхода воздуха 1.
Недостатком такого рабочего органа является большая масса, что значительно повышает энергозатраты по образованию котлованов. Кроме того, при ударном воздействии отверстие для выхода воздуха забивается грунтом, что резко снижает проникновение рабочего органа в группы и не позволяет получить котлован заданной формы.
Наиболее близким по технической ности и достигаемому результату к изобретению является рабочий орган, включающий стойку, размещенные на ней инерционные массы и захватное приспособление 2.
Основным недостатком этого рабочего органа является то, что каждая единичная масса, кроме массы, граничащей с днищем корпуса, ударяет по нему через прокладку из предыдущих масс, что резко снижает степень внедрения в грунт. Кроме того, выполнение в рабочем органе стойки криволинейного очертания усложняет его конструкцию.
Целью изобретения является снижение энергозатрат при динамическом образовании котлована.
Поставленная цель достигается тем, что в рабочем органе, включающем стойку, размещенные на ней инерционные -массы и захватное приспособление, инерционные массы смонтированы на стойке посредством упругих связей.
Кроме того, стойка выполнена полой и снабжена клапаном.
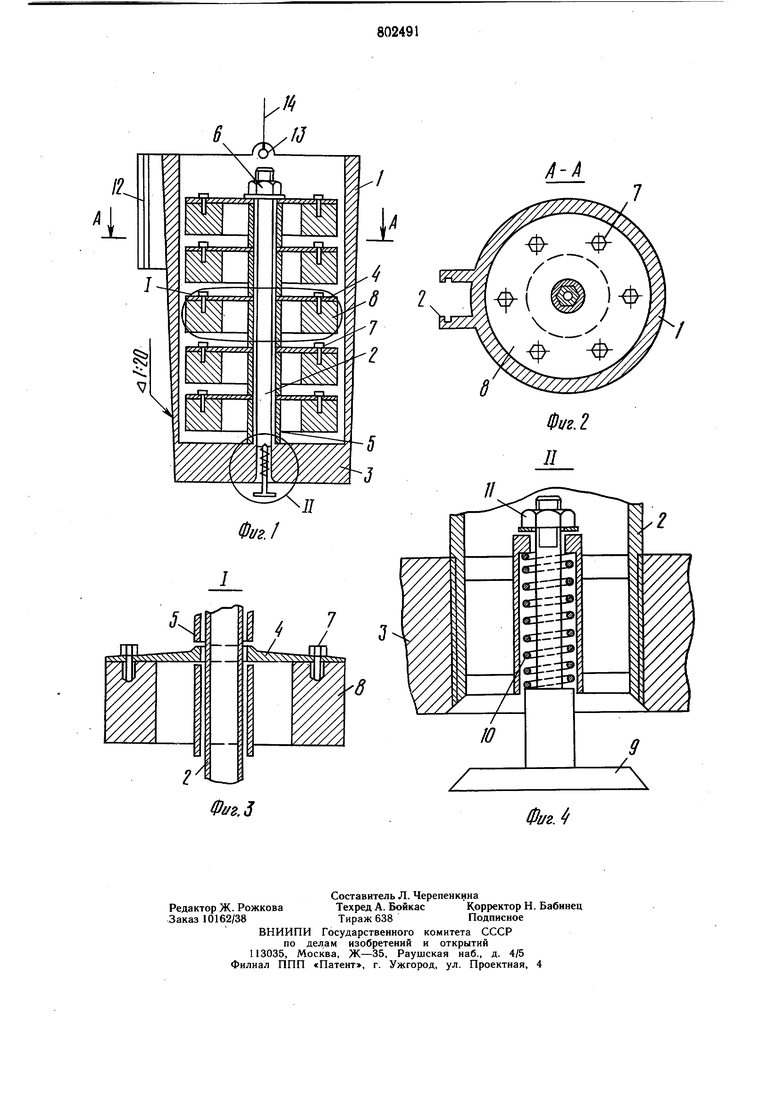
На фиг. 1 изображен предлагаемый рабочий орган, вертикальный разрез; на 5 фиг. 2 - разрез А-А фиг. 1; на фиг. 3 - узел I фиг. 1; на фиг. 4 - узел II фиг. 1.
Рабочий орган для динамического образования котлованов включает корпус 1 с центрально расположенной в нем трубочатой стойкой 2, неподвижно прикрепленной к днищу 3 корпуса. На трубчатой стойке 2 крепятся упругие подвески 4 с помощью втулок 5 и гайки 6. Упругие подвески выполнены в виде плоской листовой однослойной пружины. На подвесках с помощью болтов
7 закреплены инерционные массы 8, представляющие собой металлические или железобетонные отливки.
В нижнем конце трубчатой стойки 2 расположен клапан 9. Пружина 10, надетая на цилиндрическую часть клапана и закрепленная гайкой 11, открывает клапан 9. На корпусе 1 закреплены охватывающие прямоугольные направляющие 12 скольжения. Для подъема рабочего органа в верхней части корпуса предусмотрены проушины 13.
Рабочий орган- для динамического образования котлованов работает следующим образом.
Посредством троса 14, закрепленного к проущинам 13 корпуса 1, рабочий орган поднимают на определенную высоту и направленно сбрасывают на грунт.
Взаимодействие рабочего органа с грунтом разбивается на две фазы. При первой фазе соударения рабочего органа с грунтом на пути заглубления происходит торможение его корпуса с днищем 3 и жестко соединенной с ним трубчатой стойки 2. Однако под действием, сил инерции массы 8 продолжают движение вниз в направлении удара, взаимодействуют со стойкой 2 посредством упругих подвесок 4 и тем самым удлиняют время контакта, создавая оптимальные условия для максимального проникания рабочего органа в грунт.
В период первой фазы удара рабочего органа о грунт часть кинематической энергии элементов 8 и 4 переходит в потенциальную энергию деформации плоской пружины 4.
После этого начинается вторая фаза удара, при этом потенциальна энергия деформации пружин 4, накопленная при первой фазе, приводит в движение массы 8 в направлении, противоположном удару. Эти массы воздействуют на стойку 2 и связанный с ней корпус 1, облегчая процесс извлечения рабочего органа из грунта.
Когда рабочий орган движется в котловане, устремляясь к его основанию, то сжимаемый воздух свободно проходит в открытый клапан 9 в трубчатую стойку 2. В момент соприкосновения днища 3 корпуса с грунтом клапан закрывается, предотвращая попадание грунта в трубчатую стойку 2.
Для ликвидации осыпания грунта со стенок котлована корпусу придают конусность 1 : 15-1 : 20.
Серия ударов рабочим органом в строго определенное место приводит к образованию котлована с объемом и формой, равными объему и форме корпуса, с одновременным уплотнением забоя и боковых стенок. При таком выполнении рабочего органа снижаются энергетические затраты на проникание рабочего органа в грунт, так как
закрепление инерционных масс на упругих подвесках позволяет увеличить время удара в 2-ч5 раза и создать ударно-статическую нагрузку на грунт, в результате чего резко увеличиваются остаточные деформации
грунта.
Кроме того, повышается надежность рабочего органа, так как не происходит заклинивание его в грунте, а установка инерционных масс на упругих подвесках облегчает процесс извлечения его из грунта.
Повышается также качество изготовления котлованов за счет рациональной конструкции воздухоотвода, который не забивается грунтом и, таким образом, предотвращается вырывание грунта сжатым воздухом из
стенок котлована.
Формула изобретения
расположенные на ней инерционные массы и захватное приспособление, отличающийся тем, что, с целью снижения энергозатрат, инерционные массы соединены на стойке посредством упругих связей.
Источники информации,
принятые во внимание при экспертизе
кл. В 7 В - 1, 10.09.69 (прототип).
fc.J
Фиг.
