(Л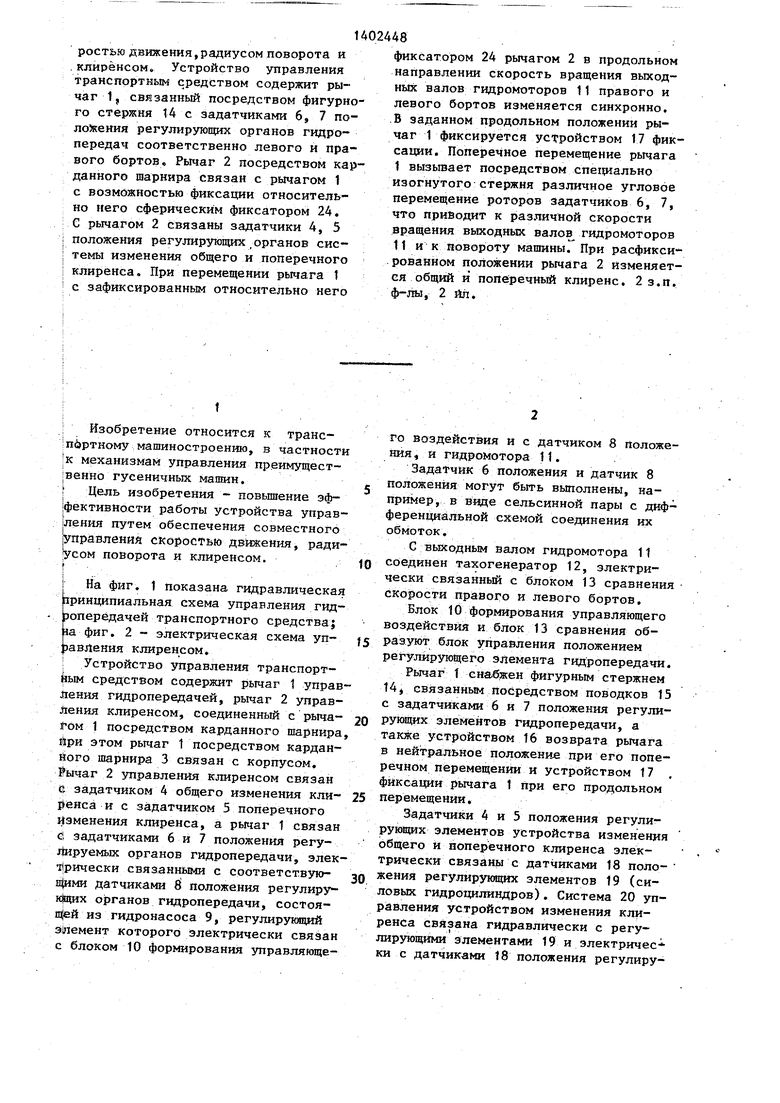
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления гидропередачами технологических тележек транспортного средства | 1980 |
|
SU912557A1 |
| ВЕЗДЕХОД | 2014 |
|
RU2549300C1 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2012 |
|
RU2491459C1 |
| Система управления положением остова транспортного средства | 1985 |
|
SU1324872A1 |
| Транспортное средство для погрузки, перевозки и разгрузки рулонов сена | 2024 |
|
RU2833277C1 |
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2004 |
|
RU2279371C2 |
| Устройство для управления движением сочлененных транспортных тележек | 1991 |
|
SU1823824A3 |
Изобретение относится.к области транспортного машиностроения, в част- .ности к механизмам управления преимущественно гусеничных машин. Цель изобретения - повьшение зффективностк работы устройства управления путем обеспечения совместного управления ско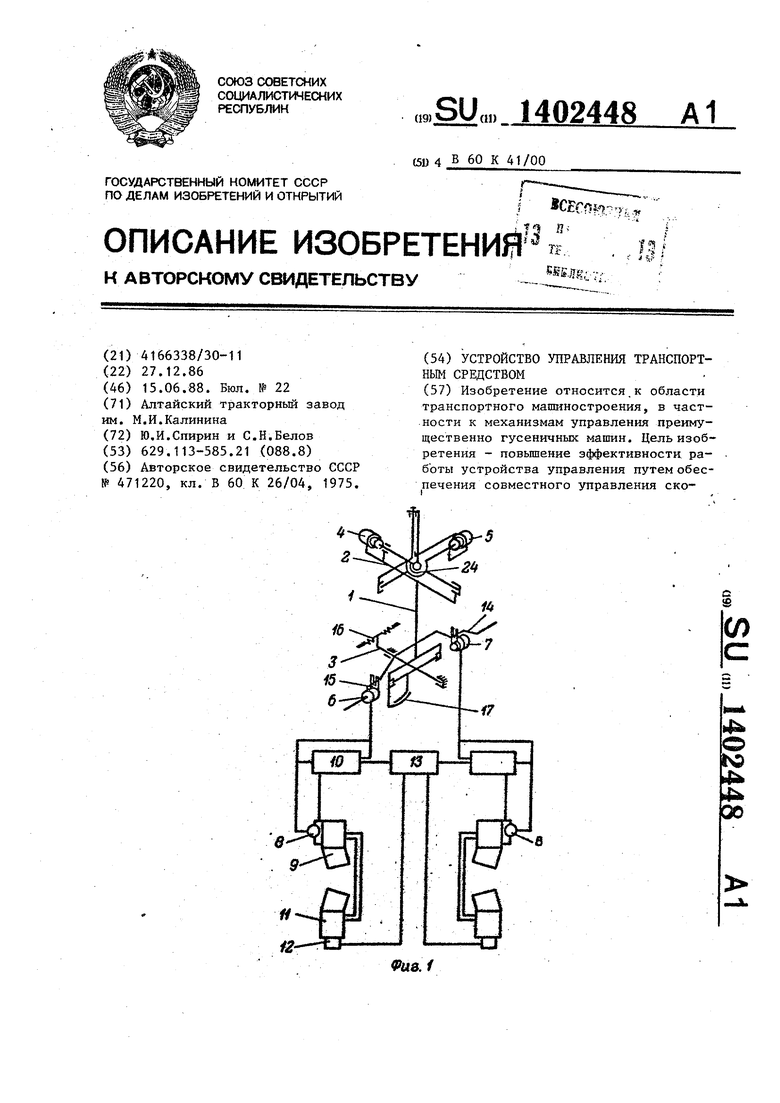
Физ, 1
ростью движения,радиусом поворота и .клиренсом. Устройство управления транспортным средством содержит рычаг 1, связанный посредством фигурного стержня 14 с задатчиками 6, 7 положения регулирующих органов гидропередач соответственно левого и правого бортов. Рычаг 2 посредством карданного шарнира связан с рычагом 1 с возможностью фиксации относительно него сферическим фиксатором 24. е рычагом 2 связаны задатчики 4, 5 положения регулирующих органов системы изменения общего и поперечного клиренса. При перемещении рычага 1 с зафиксированным относительно него
г t
j Изобретение относится к транс- ;п6ртному машиностроению, в частности :к механизмам управления преимущест- |венно гусеничных машин. I Цель изобретения - повышение эф- |фективности работы устройства управ- ления путем обеспечения совместного управления скоростью движения, радиусом поворота и клиренсом.
I На фиг, 1 показана гидравлическая принципиальная схема управления гИд- эоперёдачей транспортного средства; la фиг. 2 электрическая схема уп- давления клиренсом. I Устройство з равления транспорт- йым средством содержит рычаг 1 управления гидропередачей, рычаг 2 управления клиренсом, соединенный с рыча- J OM 1 посредством карданного шарнира йри этом рычаг 1 посредством кардан- його шарнира 3 связан с корпусом. Ёычаг 2 управления клиренсом связан tt задатчиком 4 общего изменения кли- ренса и с задатчиком 5 поперечного изменения клиренса, а рычаг 1 связан d задатчиками 6 и 7 положения регу- йнруемых органов гидропередачи, элек т|рически связанными с соответствую- 1ф1ми датчиками 8 положения регулиру органов гидропередачи, состоя- из гидронасоса 9, регулируютщй эйемент которого электрически связан с блоком 10 формирования управляющефиксатором 24 рычагом 2 в продольном направлении скорость вращения выходных валов гидромоторов 11 правого и левого бортов изменяется синхронно. В заданном продольном положении рычаг 1 фиксируется устройством 17 фиксации. Поперечное перемещение рычага
Iаызьгоает посредством специально изогнутого стержня различное угловое перемещение роторов задатчиков 6, 7, что приводит к различной скорости вращения выходных валов гидромоторов
I1и к повороту машины. При расфикси ровакном положении рычага 2 изменяется общий и поперечный клиренс. 2 з.п. ф-да1, 2 йл.
го воздействия и с датчиком 8 положения, и гидромотора 11.
Задатчик 6 положения и датчик 8 положения могут быть выполнены, например, в в«щв сельсинной пары с дифференциальной схемой соединения их обмоток.
С вькодным валом гидромотора 11 соединен тахогенератор 12, электрически связанный с блоком 13 сравнения скорости правого и левого бортов.
Блок 10 формирования управляющего воздействия и блок 13 сравнения образуют блок управления положением регулирующего элемента гидропередачи.
Рычаг 1 сна.бжен фигурным стержнем 14j связанньм посредством поводков 15 с задатчиками 6 и 7 положения регулирующих элементов гидропередачи, а также устройством 16 возврата рычага в нейтральное положение при его поперечном перемещении и устройством 17 фиксации рычага 1 при его продольном перемещении.
Задатчики 4 и 5 положения регулирующих элементов устройства изменения общего и ноперечиого клиренса электрически связаны с датчиками 18 положения регулирующих элементов 19 (силовых гидроцилиндров). Система 20 управления устройством изменения клиренса связана гидравлически с регулирующими элементами 19 и электричес ки с датчиками 18 положения регулирующих элементов и включает в сгбя блок 21 управления и электрогидравлические распределители 22 и 23 соответственно левого и правого бортов.
Рычаг 2 содержит сферический фиксатор 24.
Устройство управления транспортным средством работает следующим образом.
При перемещении рычага 1 с фиксированным относительно него рычагом 2 в плоскости, перпендикулярной задат- чикам 6 и 7 положения регулирующих элементов гидропередач левого и правого бортов, посредством фигурного стержня 14 и поэодков 15 роторы за- датчиков поворачиваются на одинаковый угол.
В обмотках возбуждения задатчиков 6 и 7 и датчиков 8 возникают сигналы рассогласования, включающие посредством блоков формирования управляющего воздействия сервомеханизмы управляющих органов гидропередачи.
При достижении управляющими органами гидропередачи положения, соответствующего положениям роторов задатчиков 6 и 7, сигнал рассогласования становится равным О и сервомеханизмы управляющих органов выключаются. В этом случае скорость вращения выходных валов гидромоторов 11 правого и левого бортов изменяется синхронно.
НИЯ относительно последнего и уст- Заданное положение рычага 1 в про- роиством фиксаций первого рычага от- дольном направлении фиксируется фиксатором 17. При отклонении рычага 1 в поперечном направлении посредством фигурного стержня 14 роторы задатчиков 6 и 7 положения регулирующих эле- ментов гидропередач левого и правого бортов поворачиваются на „различные углы, что приводит к различной скорости вращения выходных валов гидромоторов 11 и повороту машины.
При расфиксированном положении рычага 2 его продольное и попереч50
ное перемещение изменяет положение роторов задатчиков 4 и 5, что приводит к изменению общего или поперечного клиренса. Система 20 управления изменением общего и поперечного клиренса работает аналогично блоку управления регулирующими ..органами гидропередачи. Выбранное положение рычага 2 фиксируется сферическим фиксатором 24.
носительно второго, при этом первый рычаг кинематически связан с задат4Q чиками положения регулирующих элементов устройства измейения общего и поперечного клиренса, а второй рычаг снабжен карданным шарниром, посредством которого он связан с корпусом
g с возможностью продольного и поперечного перемещения относительно последнего, .фиксатором его продольного перемещения, устройством возврата в нейтральное положение, связанным с задатчйками положения регулирующих органов бортовых гидропередач.
2, Устройство по п.1, о т ли ч а- ю щ е е с я тем, что блок управления положением регулирующих элементов гид
. роперёдачи включает в себя блоки фор- ьь
мирования воздействия на регулирукшше
;элемейты гидропередачи, блок сравнения, тахогенератора, кинематически связанные с гидромоторами правого и
рмула и
4 3 о
р е т е н и я
обеспечения совместного управления скоростью движения, радиусом поворота и клиренсом, оно снабжено задат- чиками и датчиками положения регулирующих элементов гидропередачи .и блоком управления положением регулирующих элементов гидропередачи, а также ус,тройством изменения общего и поперечного клиренса с регулирующими элементами и их системой управления,
снабженным задатчйками и датчиками положения регулирующих элементов, котбрые электрически Связаны между собой и системой управления регулирующими элементами устройства изменения клиренса, при этом органы управления состоят из двух рычагов, первый из которых снабжен карданным, шарниром, посредством которого он соединен с вторым рычагом с иозможноатью
продольного и поперечного перемеще
НИЯ относительно последнего и уст- роиством фиксаций первого рычага от-
носительно второго, при этом первый рычаг кинематически связан с задатчиками положения регулирующих элементов устройства измейения общего и поперечного клиренса, а второй рычаг снабжен карданным шарниром, посредством которого он связан с корпусом
с возможностью продольного и поперечного перемещения относительно последнего, .фиксатором его продольного перемещения, устройством возврата в нейтральное положение, связанным с задатчйками положения регулирующих органов бортовых гидропередач.
2, Устройство по п.1, о т ли ч а- ю щ е е с я тем, что блок управления положением регулирующих элементов гидроперёдачи включает в себя блоки фор-
мирования воздействия на регулирукшше
элемейты гидропередачи, блок сравнения, тахогенератора, кинематически связанные с гидромоторами правого и
|левого бортов и электрически с вхо- |дом блока сравнения, при этом входы блоков формирования воздействия соединены с выходами блоков сравнения, с задатчиками и датчиками положения регулирующих элементов гидропередачи, :а выходы - с регулирующими элементами : гидропередачи.
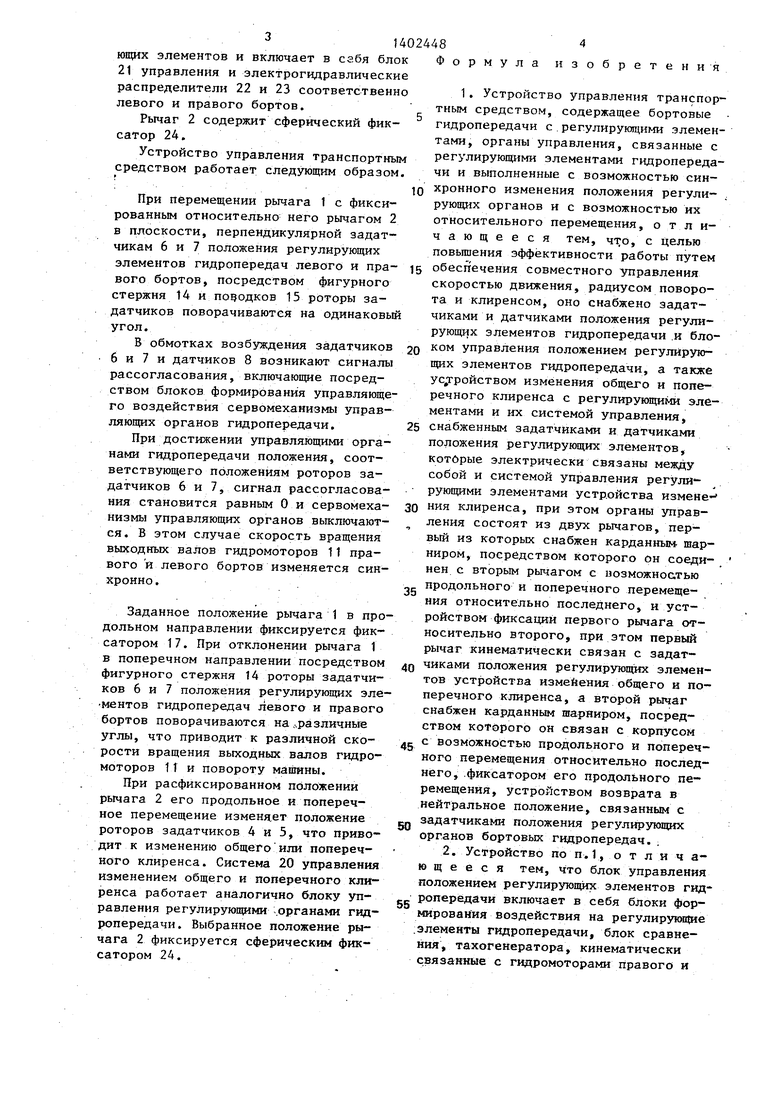
; 3. Устройство по п.1, о т л и ч а fo щ е е с я тем, что система управф{/г2
ления изменением общего и поперечного клиренса включает в себя блок управления и электрогидравлические распределители, при этом входы блока управления электрически связаны с задатчиками и датчиками положения регулирующих элементов системы изменения клиренса, а выходы - с электрогидравлическими распределителями, которые гидравлически связаны с регулируемыми- элементами.
| Устройство для управления гидрообъемной передачей самоходной машины | 1972 |
|
SU471220A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
