Изобретение относится к автоматическому управлению, в частности к способам экстремального регулирования, и преимущественно может быть использовано для управления объектами с экстремальной характеристикой и переменными динамическими параметрами.
Известен способ поиска экстремума, основанный на формировании периодических широтно-импульсно модулированных пробных сигналов управления, период и длительность которых изменяют пропорционально производной выходного сигнала, отличающийся тем, что с целью повышения быстродействия и точности поиска амплитуду пробных сигналов управления изменяют пропорционально амплитуде выходного сигнала при поиске минимума и пропорционально разности между постоянным сигналом и выходным сигналом при поиске максимума, причем величину постоянного сигнала выбирают больше выходного сигнала. Этот метод также плохо функционирует в условиях помех [1].
Также известен способ экстремального управления объектами второго порядка с последовательно соединенными линейным звеном и нелинейным звеном с экстремальной статической характеристикой, основанный на измерении выходных координат объекта управления и формировании управляющего сигнала с оптимальным в смысле минимума функционала, заданного на выходах объекта, управлением, переводящим объект в экстремальное состояние. Измеряют выходную координату нелинейного звена, восстанавливают истинную и ложную выходные координаты линейного звена, после пробного шага определяют истинную выходную координату линейного звена, управляющий сигнал в пробном и последующих рабочих шагах формируют в функции выходной координаты линейного звена и ее экстремального значения [2]. Однако этот способ хорош только для ОУ второго прядка.
В качестве прототипа выбран способ экстремального регулирования с поддержанием рабочей точки инерционного объекта на заданном расстоянии от экстремума, заключающийся в том, что по регулируемой величине µ на выходе объекта и управляющему воздействию φ в дифференциаторах вычисляют соответствующие производные dµ/dt и dφ/dt, по которым в блоке управления рассчитывают dµ/dφ, являющуюся входом нечеткого регулятора, в котором рассчитывается степень смещения управляющего воздействия, которая, суммируясь с текущим управляющим воздействием φ, дает новое значение φi+1, сохраненное в запоминающем устройстве текущее управляющее воздействие φ подают на объект регулирования и не меняют до тех пор, пока не произойдет замыкание логического ключа, в результате чего новое значение φi+1 записывают в запоминающее устройство и передают на объект регулирования, при этом срабатывание логического ключа происходит в тот момент, когда величина производной регулируемой величины dµ/dt войдет в трубку допуска, определяемую зоной Δ, а запись нового значения управляющего воздействия в запоминающее устройство производят один раз за цикл регулирования, после чего процесс повторяют [3]. Но этот метод плохо работает в условиях сильных помех.
Техническим результатом является повышение точности ведения технологических процессов на объектах экстремального типа различной инерционности при поддержании их рабочей точки в области экстремума в условии сильных помех.
Это достигается тем, что в способе поиска экстремума статистической характеристики инерционного объекта, основанном на стратегии управления, задаваемой в виде управляющих воздействий, и управляющее воздействие не является постоянным, согласно предлагаемому изобретению по измеренным значениям входного и выходного сигнала рекуррентным способом вычисляют коэффициент передачи объекта k0 и изменяют управляющее воздействие, добиваясь нулевого значения коэффициента передачи.
Сущность предложенного способа заключается в следующем. По регулируемой величине на выходе объекта и по его входу вычисляются коэффициенты модели объекта. По этим коэффициентам вычисляется коэффициент передачи объекта. По знаку и величине этого коэффициента можно определить расстояние рабочей точки. Исходя из этого, подбираются такие управляющие воздействия, чтобы вычисляемый коэффициент передачи был нулевой.
Например, последовательность действий заключается в следующем. Считывают входной и выходной сигналы объекта. По рекуррентному алгоритму вычисляют коэффициенты АРСС-модели объекта управления:

где y(k) - выход модели (временного ряда) в k-й момент времени; {ai(k), i=1, n} - параметры авторегрессии; {bj(k), j=1, m) - параметры скользящего среднего; s - дискретное запаздывание. По вычисленным коэффициентам рассчитывают коэффициент передачи объекта
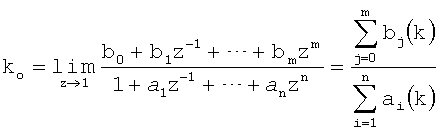
По алгоритму поиска нуля функции изменяют входной сигнал объекта, добиваясь нулевого значения коэффициента передачи.
Использование рекуррентного алгоритма значительно повышает помехоустойчивость предлагаемого способа, обеспечивая гарантированную устойчивость и сходимость оценок АРСС-модели [4], а замена поиска экстремума поиском нуля функции обеспечивает повышение точности поиска экстремума.
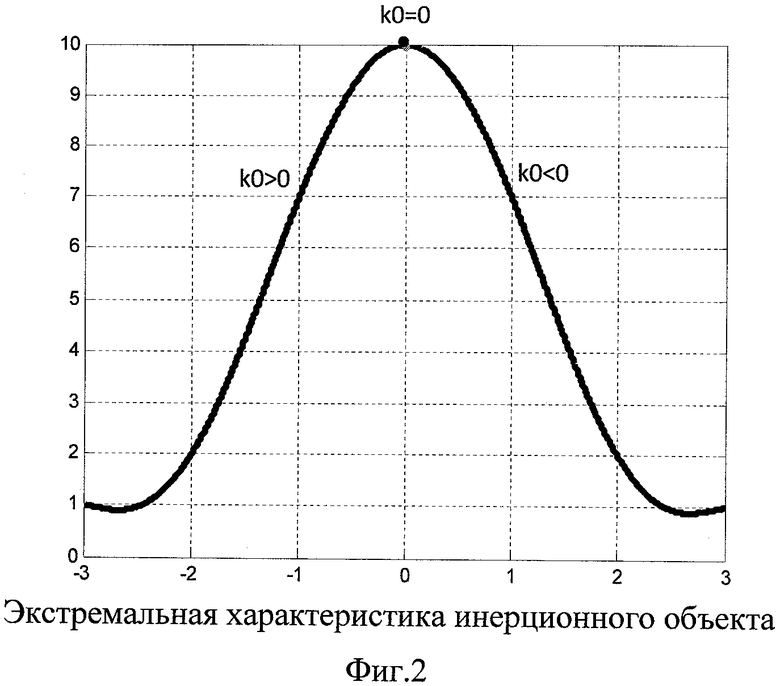
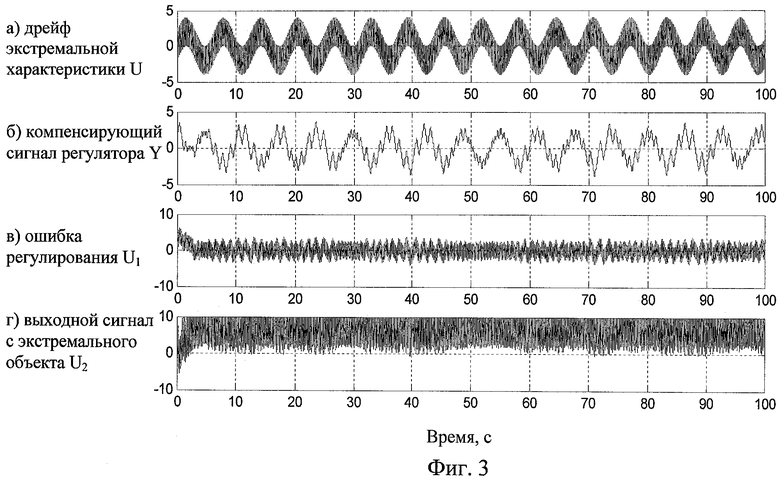
Для проверки предложенного алгоритма в Simulink разработана модель системы (фиг.1). Она включает в себя инерционный объект второго порядка с экстремальной характеристикой (фиг.2) и экстремальным регулятором, в котором реализуется алгоритм рекуррентного вычисления коэффициента передачи и поиска нуля этого коэффициента. Дрейф экстремальной характеристики моделировали путем подачи на вход системы гармонического низкочастотного воздействия, к которому добавляются высокочастотные помехи.
Результаты моделирования показаны на (фиг.3). Предлагаемый способ практически компенсирует дрейф экстремума, а ошибка регулирования определяется только уровнем помех.
Для обеспечения промышленного использования возможно применение современных технических средств автоматизации технологических процессов, реализованных на базе промышленных контроллеров или дискретных элементах электро- или пневмоавтоматики.
Источники информации
1. Авторское свидетельство №744447, кл. G05В 13/00, 1980 г.
2. Заявка на изобретение №95110041, кл. G05В 13/00, 1997 г.
3. Патент РФ №2298821, кл. G05В 13/00, 11/00, 2007 г.
4. Изерман Р. Цифровые системы управления. - М.: Мир, 1984. - 541 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Способ экстремального регулирования инерционных объектов с транспортным запаздыванием | 1975 |
|
SU1125601A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОИСКА | 1969 |
|
SU237949A1 |
| УСТРОЙСТВО СОГЛАСОВАННОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДАМИ ОСЕВОГО ВЕНТИЛЯТОРА | 2003 |
|
RU2258157C2 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
| Способ экстремального регулирования инерционных объектов | 1972 |
|
SU627443A1 |
| СПОСОБ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ С ПОДДЕРЖАНИЕМ РАБОЧЕЙ ТОЧКИ ИНЕРЦИОННОГО ОБЪЕКТА НА ЗАДАННОМ РАССТОЯНИИ ОТ ЭКСТРЕМУМА | 2005 |
|
RU2298821C2 |
| СПОСОБ ДИСКРЕТНОГО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 1991 |
|
RU2015522C1 |
| АДАПТИВНАЯ ПРИСТАВКА К ДВУХПОЗИЦИОННОМУ РЕГУЛЯТОРУ | 2010 |
|
RU2424545C1 |
| СПОСОБ АДАПТИВНОЙ АВТОМАТИЧЕСКОЙ САМОНАСТРОЙКИ МНОГОПАРАМЕТРИЧЕСКИХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОПТИМАЛЬНЫЕ УСЛОВИЯ | 2000 |
|
RU2189069C2 |
Изобретение относится к автоматическому управлению, в частности к способам экстремального регулирования, и преимущественно может быть использовано для управления объектами с экстремальной характеристикой и переменными динамическими параметрами. Технический результат - повышение точности ведения технологических процессов на объектах экстремального типа различной инерционности при поддержании их рабочей точки в области экстремума в условии сильных помех. Это достигается за счет того, что стратегия управления задается в виде управляющих воздействий, определяющихся по изменениям входного и выходного сигналов экстремального объекта управления. 3 ил.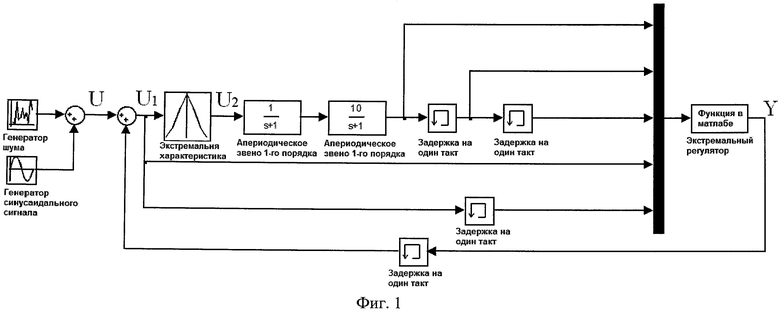
Способ поиска экстремума статистической характеристики инерционного объекта, основанный на стратегии управления, задаваемой в виде управляющих воздействий, и управляющее воздействие не является постоянным, отличающийся тем, что по измеренным значениям входного и выходного сигнала рекуррентным способом вычисляют коэффициент передачи объекта k0, и изменяют управляющее воздействие, добиваясь нулевого значения коэффициента передачи.
| СПОСОБ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ С ПОДДЕРЖАНИЕМ РАБОЧЕЙ ТОЧКИ ИНЕРЦИОННОГО ОБЪЕКТА НА ЗАДАННОМ РАССТОЯНИИ ОТ ЭКСТРЕМУМА | 2005 |
|
RU2298821C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ПЕРЕМЕННЫМ ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 2003 |
|
RU2258950C2 |
| Безопасная бритва | 1984 |
|
SU1279819A2 |
| JP 2007309226 А, 29.11.2007. | |||

