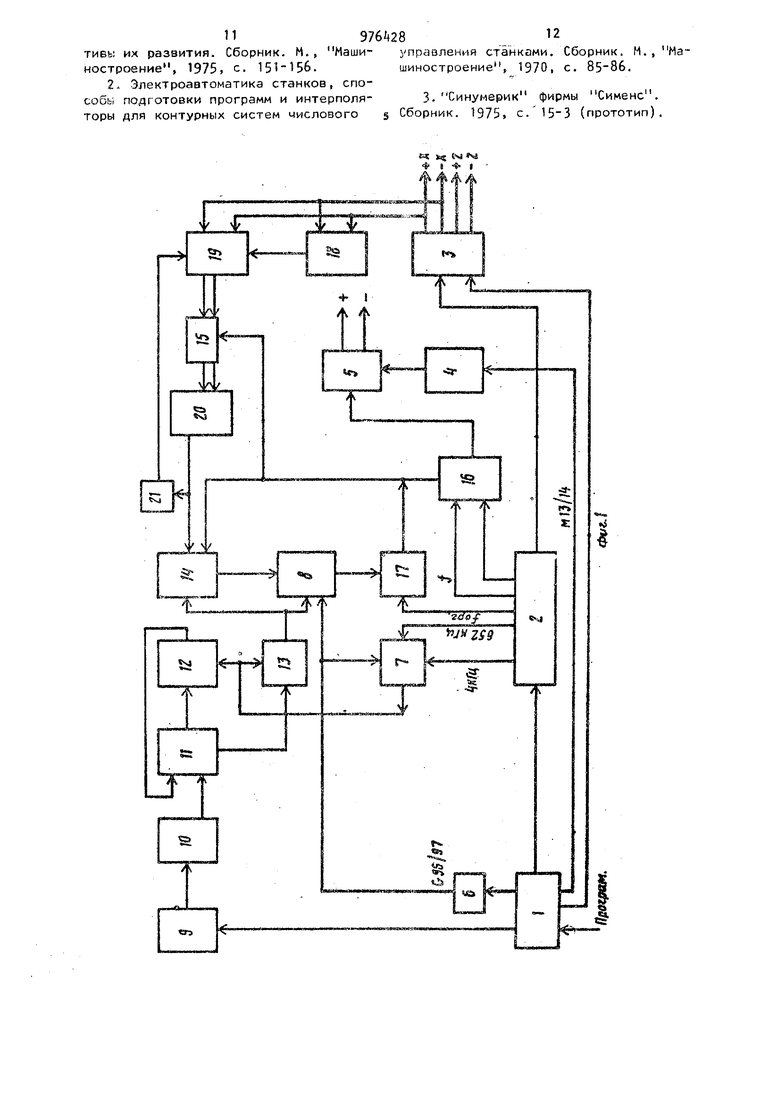
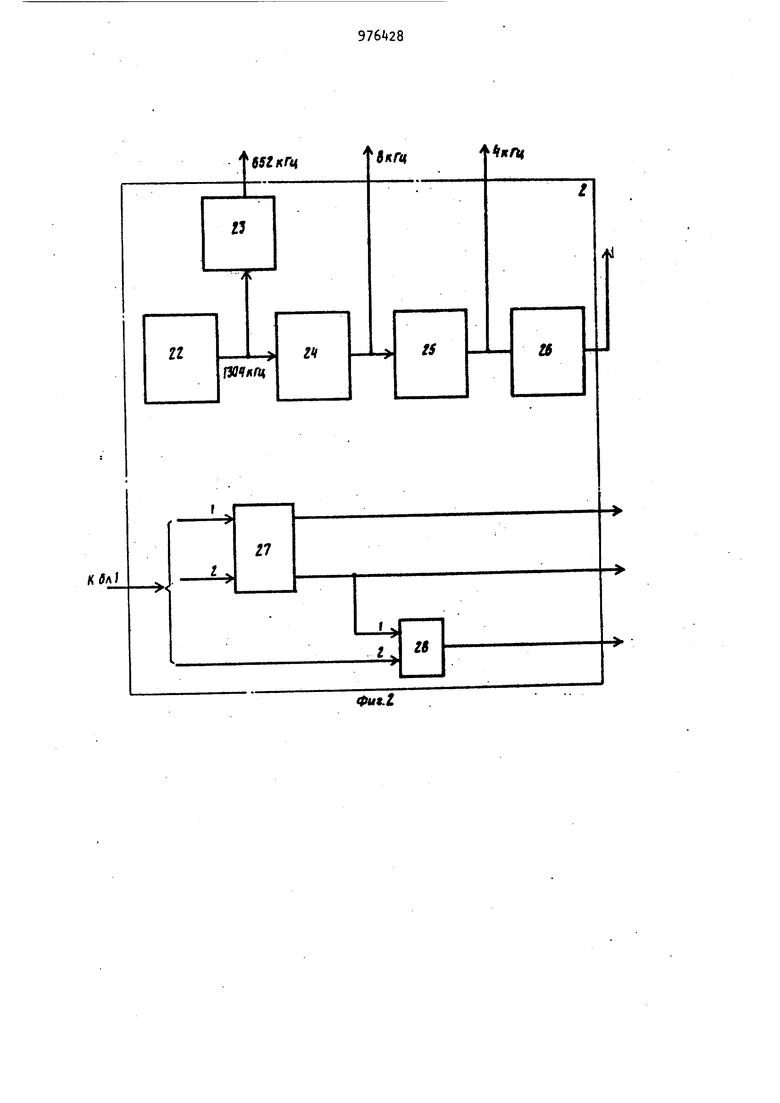
Изобретение относится к автоматике г1 вычислительной технике и может быть использовано в системах числового программного управления станками, в которых требуется обеспечить задание оборотов шпинделя и стабилизацию скорости резания. Известно устройство для числового программного управления станками, обеспечивающее стабилизацию скорости резания, состоящее из первого цифроаналогового преобразователя, второго цифро-аналогового преобразователя и суммирующего усилителя, причем выход второго цифро-аналогового преобразователя подключен к входу операционного усилителя, выход которого подключен к входу второго циф| -аналогового преобразователя, выход первого циф ро-аналогового преобразователя присоединен к второму входу операционного усилителя tl1Недостатком этого устройства является низкая точность поддержания ског рости резания (не точнее 10), сложность и неудобство в производстве и эксплуатации, что определяется наличием двух цифро-аналоговых преобразователей и большим числом аналоговых регулировок при настройке и эксплуатации. Известно также устройство для программного управления, состоящее из регулируемого генератора рабочей частоты, выход которого присоединен к входу интерполятора, выходы которого подключены к входам первого и второго цифро-аналоговых преобразователей, выходы которых подключены соответственно к входам.первого и второго квадраторов, выходы которых присоединены к входам операционного суммирующего усилителя, выход которого подключен к входу второго операционного усилите ля, второй вход которого подключен к выходу задатчика программы, а выход к входу управляемого генератора.С23. Недостатком указанного устройства являются узкие функциональные возможности, в частности неспособность обес печить поддержание скорости резания, а лишь возможность поддержания контур ной скорости. Наиболее близким техническим решением к изобретению является устройство, состоящее из блока ввода программы, блока центрального управления и последовательно соединенных интерполя тора, накопителя фактических значений координаты X, первого цифро-аналогово го преобразователя, аналогового делителя, первого ключа, переключателя коррекции аналогового ограничителя, схемы опредепения знака, а также из последовательно соединенных двоичного накопителя, второго цифро-аналогового преобразователя, блока согласования напряжения, блока выбора ступени передачи и второго ключа, выход которого присоединен к входу переключателя коррекции скорости, выход блока выбора ступени передачи присоединен к второму входу аналогового делителя, а второй вход аналогового ограничителя присоединен к выходу накопителя ограничения 3 Недостатками устройства являются низкая точность поддержания скорости резания и низкая эксплуатационная надежность, которая объясняется наличием большого числа цифро-аналоговых преобразователей и аналоговых регулировок. Кроме того, при переходе режущей кромки инструмента через ось вращения детали в результате переполнен ния накопителя координаты X происходит рывок скорости вращения шпинделя, что крайне нежелательно, особенно при торцовой обработке, и может привести к браку детали. Целью изобретения является повышение точности и надежности устройства. Поставленная цель достигается тем, что в устройство для программного управления, содержащее интерполятор, первый коммутатор, первый и второй элементы памяти, блок управления, бло ввода программы, соединенный первым и вторым выходами соответственно с входом первого элемента памяти и с первым входом интерполятора, введены четыре коммутатора, три регистра, ограничитель частоты, комбинационный сумматор, счетчик импульсов, реверсив ный счетчик, дешифратор нуля, блок синхронизации, первый элемент И и реверсивныи делитель, соединенный первым входом с первым выходом интерполятора и с первым входом второго коммутатора, вторым входом - с вторым выходом интерполятора и вторым входом второго коммутатора, а выходом - с третьим входом второго коммутатора, подключенного четвертым входом к выходу дешифратора, нуля, а выходом - к первым входам блока синхронизации, связанного выходами с соответствующими входами реверсивного счетчика импульсов, подключенного выходом к входу дешифратора нуля и к первому аходу счетчика импульсов, соединенного выходом с первым входом третьего коммутатора, связанного вторым входом с выходом первого элемента памяти и с первым входом четвертого коммутатора, подключенного вторым и третьим входами соответственно к первому и второму выходам блока управления, соединенного третьим выходом с первым входом ограничителя частоты, четвертым и пятым вь:ходами соответственнос первым и вторым входами пятого коммутатора , шестым выходом - с вторым входом интерполятора, а входом - с выходом блока ввода программы, подключенного третьим выходом к входу второго элемента памяти, а четвертым выходом через включенные последовательно первый и второй регистры - к первому входу комбинационного сумматора, соединенного вторым входом и первым выходом соответственно с выходом и первым входом третьего регистра, а вторым выходом - с первым входом первого элемента И, связанного вторым входом с вторым входом третьего регистра и с выходом четвертого коммутатора, а выходом - с вторым входом счетчика импульсов и с третьим входом третьего коммутатора, подключенного выходом к второму входу ограничителя частоты; подключенного выходом к третьему входу счетчика импульсов, к входу блока синхронизации и к третьему входу пятого коммутатора, связанного выходом с первым входом первого коммутатора, подключенного вторым входом к выходу второго элемента памяти. На фиг. 1 дана блок-схема устройства; на фиг. 2 - схема блока управления; на фиг. 3 - схема ограничителя частоты; на фиг. 4 - схема блока синхронизации. Устройство содержит блок 1 ввода программы, блок 2 управления, интерполятор 3, второй элемент памяти, первый коммутатор 5. первый элемент 6 памяти, четвертый коммутатор 7. третий коммутатор 8, первый и второй регистры 9 и 10, комбинационный сумматор 11, третий регистр 12, первый элемент И 13, счетчик 14 импульсов, блок 15 синхронизации, пятый коммутатор 16 ограничитель 17 частоты, реверсивный делитель 18, второй коммутатор 19, ре версивный счетчик 20 импульсов, дешифратор 21 нуля, генератор 22 частоты, первый, второй, третий, четвертый делители 23-26 частоты, первый триггер 27, второй элемент И 28, второй триггер 29, RS-триггер 30, третий элемен И 31, третий триггер 32, элемент ИЛИ 33, четвертый, пятый и шестой элементы И , четвертый триггер 37Устройство работает следующим образом. При задании в программе чисел оборотов шпинделя в минуту (команда G97 на выходе устройства должна быть частота, соответствующая заданным оборотам. Это первый режим. При втором режиме в программе задается скорость ре зания {команда G 9б) - метры в минуту При этом частота на выходе должна соответствовать таким оборотам шпинделя, которые обеспечивают заданную скорость резания при изменении радиуса резания. Т. е. при уменьшении радиуса резания обороты шпинделя увеличиваются, а при увеличении уменьшаются. Таким образом, скорость резания поддерживается постоянной. Рассмотрим работу устройства в пер вом режиме. Через блок 1 ввода npoi- раммы код оборотов шпинделя вводится и запоминается в первом регистре 9 код режима (G 97) запоминается в первом элементе 6 памяти, код направления вращения шпинделя (М13, Ml4) запоминается во втором элементе k памяти направления вращения, информация о координатных перемещениях передается в интерполятор 3, и сигнал окончания ввода .программы запускает блок 2 управления. Информация из первого регистра 9i который представляет промежуточное ЗУ, передается во второй регистр 10 (рабочее ЗУ) и присутствует на первом входе комбинационного сумматора 11, который с третьим регистром 12 образует параллельный накапливающий сумматор. Сигнал переполнения комбинационного сумматора 11 подается на первый вход первого элемента И 13. На второй вход последнего с выхода блока 2 управления через четвертый коммутатор 7 подается тактовая частота, которая поступает также и на второй вход третьего регистра 12, осуществляя в накапливающем сумматоре циклы суммирования. Например, если объем накапливающего сумматора равен tO 96, т. е, двенадцати двоичным разрядам, а тактовая частота суммирования равна lO 9б Гц, то при задании в программе, например, 2000 оборотов в минуту (что в двоичном коде должно соответствовать коду двух тысяч во втором регистре 10), на выходе элемента И 13 при задании режима G 97 присутствует частота 2000 Гц. Эта частота через третий коммутатор 8 и ограничитель 17 частоты поступает на третий вход пятого коммутатора (коммутатора выходной частоты) 1б,на первый вход которого поступает из блока 2 управления низкая частота, соответствующая оборотам шпинделя, на которых можно производить переключение механической коробки скоростей шпинделя по сигналам из блока 2 управления, поступающим на второй вход пятого коммутатора 16. С выхода последнего частота поступает чеоез первый коммута-тор (направления вращения) 5 на выход. При работе устройства во втором режиме, т. е. при задании в программе скорости резания (G 9б), в первый регистр 9 вводится число, соответствующее метрам в минуту. В этом режиме устройство работает в соответствии с формулой где п - число оборотов шпинделя в минуту;f - тактовая частота, на которой работает накапливающий сумматор;К - коэффициент деления накапливающего сумматора; R - радиус резания, мм. Информация о радиусе, т. е. о координате X, поступает .из интерполятора 3 в счетчик 20 импульсов через реверсивный делитель 18, втором коммутатор (коммутатор знака) 19 и блок 15 синхронизации. Реверсивный делитель 18 пересчитывает импульсы по координате X до од7 9 ного миллиметра. Например, если цена импульса равна 1 мкм, то коэффициент деления реверсивного делителя 18 должен быть 1000. Для работы в обе стороны от оси вращения шпинделя второй коммутатор 19, при наличии сигнала из дешифратора 21 нуля, коммутирует выходные сигналы таким.образом, что в счетчике 20 всегда имеется прямой код числа миллиметров радиуса. На второй (вычитающий) вход счетчика 1 поступает частота с выхода первого элемента И 13. Импульсы с выхо да счетчика И поступают на выход уст ройства так же, как и в первом режиме а также через ограничитель 17 частоты поступают на третий вход счетчика И для параллельной записи числа с выхода счетчика 20. Одновременно выходной сигнал ограничителя 17 поступает на второй блок 15 синхронизации, необходимого для задержки импульсов на вход реверсивного счетчика 20 на время записи числа из счетчика 20 во второй счетчик 1. Таким образом, частота г выхода первого элемента И 13 оказывается поделенной на величину радиуса в миллиметрах. Тактовую частоту суммирования легко определить из вышеупомянутой формулы f n-KR. Например 30 ния переключения. если задана скорость резания 200 метров в минуту, а радиус резания 159.2м то обороты шпинделя должны быть Р , где Vpg, заданная скорост длина окружности, т. е резания, а 1ООм/мин ,. п 200 оборотов в минуту Коэффициент деления накапливающего сумматора К определяется отношением его объема к заданному числу, так как -- 20,8. Подставляя данные 200 в формулу, получим f 200.20,48.159,2 652 кГц. Эта частота (б52 кГц) всегда постоянная для условия, что выходная час тота устройства равна оборотам шпинделя, т. е. 1000 Гц - 1000 об/мцн, 2000 Гц - 2000 об/мин и т. д. Ограничитель 17 частоты необходим для ограничения частоты до заданного уровня при работе устройства в режиме поддержания скорости резания, так как при уменьшении радиуса резания до нуля частота с выхода счетчика И равна его входной частоте. Частота ограничения поступает из блока 2 управления на первый вход ограничителя 178В блоке 2 управления используются генератор 22 с частотой 130 кГц, первый делитель 23 частоты на два для получения частоты 652 кГц, второй делитель 2k частоты на сто шестьдесят три для получения частоты 8 кГц, третий делитель 25 частоты на два для получения частоты 4 кГц и четвертый делитель 26 частоты на п для полумения низкой частоты (100-(00 Гц), необходимой для проворота коробки скоростей станка при переключении механической передачи. Первый триггер 27 управляет коммутатором 16, по входу 2 второго элемента И 28 производится пуск интерполятора 3 если отсутствует переключение или пришло окончание переключения коробки скоростей. При наличии в программе команды На переключение коробки скоростей первый триггер 27 по первому входу устанавливается в положение, соответствующее низкой частоте на выходе устройства. Второй элемент И 28 закрыт по первому входу сигналом с одного из выходов первого триггера 27. После окончания переключения коробки скоростей первый триггер 27 переключается в противоположное состояние по второму входу сигналом окончаВ ограничителе 17 частоты при появлении импульса на первом входе треть его элемента И 31 КЗ-триггер 30 устанавливается в положение, при котором на его первом выходе присутствует положительный сигнал, а на втором выходе - отрицательный. Соответствующие сигналы будут на входах О и К второго триггера 29. На счетный вход триггера 29 поступает частота 8 кГц. Первым счетным импульсом устанавливается положительный сигнал на первом выходе второго триггера 29, а на втором выходе - отрицательный, который переключает RS-триггер 30 в противоположное состояние и запрещает прохождение внешних сигналов через третий элемент И 31- Вторым счетным сигналом второй триггер 29 переключается в исходное состояние. Частота выходных сигналов второго триггера 29 не может быть выше 4 кГц, т. е. половины частоты входных счетных сигналов, даже если на входе третьего элемента И 31 будет постоянный потенциал. Блок 15 синхронизации необходим для правильной записи кода радиуса из реверсивного счетчика 20 в счетчик 1 4. 997 Выходные сигналы из второго коммутатора 19 поступаю на соответствующий вход .Плюс или Минус блока 15 синхронизации, устанавливая третий триггер 32 в соответствующее положение, и через элемент ИЛИ 33 поступают на первые входы четвертого и пятого элементов И 3 и 35. а также на первый вход шестого элемента И 36. Выходной сигнал поступает с выхода того элемента И З или И 35. второй вход которого открыт третьим триг гером 32. При совпадении любого входного импульса Плюс или Минус, с импульсом синхронизации от ограничителя 17 частоты, на втором входе шестого элемента И Зб четвертый триггер 37 переключается, и его выходной сигнал через элемент ИЛИ 33 подтверждает и удерживает один и.з элементов И З или И 35 в открытом состоянии, удлиняя по времени выходной импульс элементов И З или И 35 до окончания дей ствия сигнала синхронизации с выхода ограничителя 17 частоты. Окончание сигнала синхронизации закрывает шестой элемент И 36 и переключает четвер тый триггер 37 в исходное состояние. В реверсивном счетчике 20 счетный про цесс осуществляется по заднему фронту входных импульсов. Преимуществами предлагаемого устройства являются эксплуатационная про стота и надежность, так как в нем отсутствуют аналоговые элементы и регулировки, высокая точность поддержания скорости, которая может быть сделана любой, необходимой практически, возможность работы в обе стороны от оси вращения шпинделя, сокращение затрат на регулировку и подстройку при наладке и эксплуатации. Формула изобретения Устройство для программного управления, содержащее интерполятор, первый коммутатор, первый и второй элементы памяти, блок управления, блок ввода программы, соединенный первым и вторым выходами соответственно с входом первого элемента памяти и с первым входом интерполятора, отличающееся тем, что, с целью повышения точности и надежности устройства , в него введены четь1ре коммутатора, три регистра, ограничитель частоты, комбинационный сумматор, счет8чик импульсов, реверсивный счетчик импульсов, дешифратор нуля, блок синхронизации, первый элемент И и реверсивный делитель, соединенный первым входом с первым выходом интерполятора и с первым входом второго коммутатора , вторым входом - с вторым выходом интерполятора и вторым входом второго коммутатора, а выходом - с третьим входом второго коммутатора, подключенного четвертым входом к выходу деиифратора нуля, а выходом - к первым входам блока синхронизации, связанного выходами с соответствующими входами реверсивного счетчика импульсов, подключенного выходом к входу дешифратора нуля и к первому входу счетчика импульсов, соединенного выходом с первым входом третьего коммутатора, связанного вторым входом с выходом первого элемента памяти и с первым входом четвертого коммутатора, подключенного .вторым и третьим входами соответственно к первому и второму выходам блока управления, соединенного третьим выходом с первым входом ограничителя частоты, четвертым и пятым выходами соответственно - с первым и вторым входами пятого коммуташестым выходом - с вторым вхотора, дом интерполятора, а входом - с выходом блока ввода программы, подключенного третьим выходом к входу второго элемента памяти, а четвертым выходом через включенные последовательно первый и второй регистры - к первому входу комбинационного сумматора, соединенного вторым входом и первым выходом соответственно с выходом и первым входом третьего регистра, а вторым выходом - с первым входом первого элемента И, связанного вторым входом с вторым входом третьего регистра и с выходом четвертого коммутатора, а выходом - с вторым входом счетчика импульсов и с третьим входом третьего коммутатора, подключенного выходом к второму входу ограничителя частоты, подключенного выходом к третьему входу счетчика импульсов, к входу блока синхронизации и к третьему входу пятого коммутатора, связанного вы-ходом с первым входом первого коммутатора , подключенного вторым входом к выходу второго элемента памяти. Источники информации, принятые во внимание при экспертизе : Электроавтоматика станков. Системы числового управления и перепек1197642812
тивы их развития. Сборник. М., Маши- управления станками. Сборник. М., Нанестроение, 1975, с, . шиностроение 1970, с. 85-86.
2. Электроавтоматика станков, способы подготовки программ и интерполя- 3. Синумерик фирмы Сименс, торы для контурных систем числового 5 Сборник. , с. 15-3 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления шпинделем | 1987 |
|
SU1511735A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для программного управления скоростью подачи | 1982 |
|
SU1067473A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |

Кбл1
-h
0
56
