(54) ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1980 |
|
SU877726A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Автономная система электрооборудования | 1987 |
|
SU1621124A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU902041A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2366069C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| Устройство для формирования опорных сигналов управления синхронным двигателем | 1985 |
|
SU1319225A1 |
| Бесконтактный электродвигатель постоянного тока | 1975 |
|
SU570159A2 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
1
, Изобретение относится к бесконтактным двигателям постоянного тока для систем автоматики и может быть использовано прежде всего для создания бесконтактных двигателей с точным управлением угловым положением ротора и мгновенной скоростью движения.
Известны вентильные электродвигатели (ВД) общего типа, содержащие электромеханический преобразователь, коммутатор с модуляторами импульсов на его входе и датчик угловой координаты 1. В них электромеханический преобразователь выполнен на основе фазного статора и ротора из постоянного магнита. Датчик Вырабатывает фазовые сигналы, имеющие дискретную форму, которые управляют коммутатором.
Однако такие ВД имеют значительные пульсации электромагнитного момента в функции угловой координаты, вследствие чего характеризуются низкой точностью управления углом и скоростью.
Известны ВД с синусоидальными выходными токами, что повыщает точность управления собственно двигателем 2. Датчик углового положения вьшолнен по типу сельсина и снабжен однофазным источником питания. Выходные сигналы на фазных выходных обмотках сельсина, амплитудномодулируемые в функции его угловой коордилаты, поступают на демодуляторы и фильт J ры, где преобразуются в гладкие составляющие, которые, в свою очередь, используются как опорные в узлах подчиненного формирования тока со специальными токовыми датчиками. Величина тока регулируется путем регулировки напряжения ис0 точника- питания сельсина.
Недостатки таких двигателей заключаются в искажениях и запаздывании сигналов в демодуляторах и фильтрах, нелинейной зависимости тока от входного сигнала, больщом количестве соединений между электронной частью и двигателем, сложности датчиков тока и искажениях в них, что в конечном счете не обеспечивает точности управления двигателем.
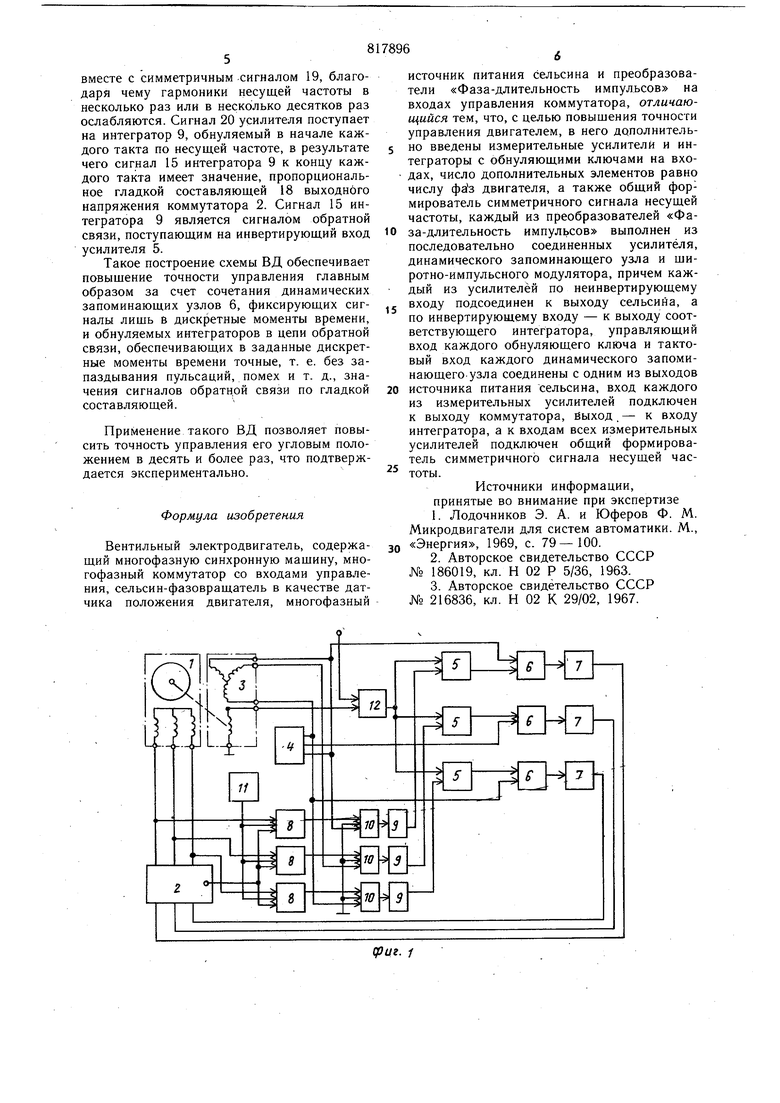
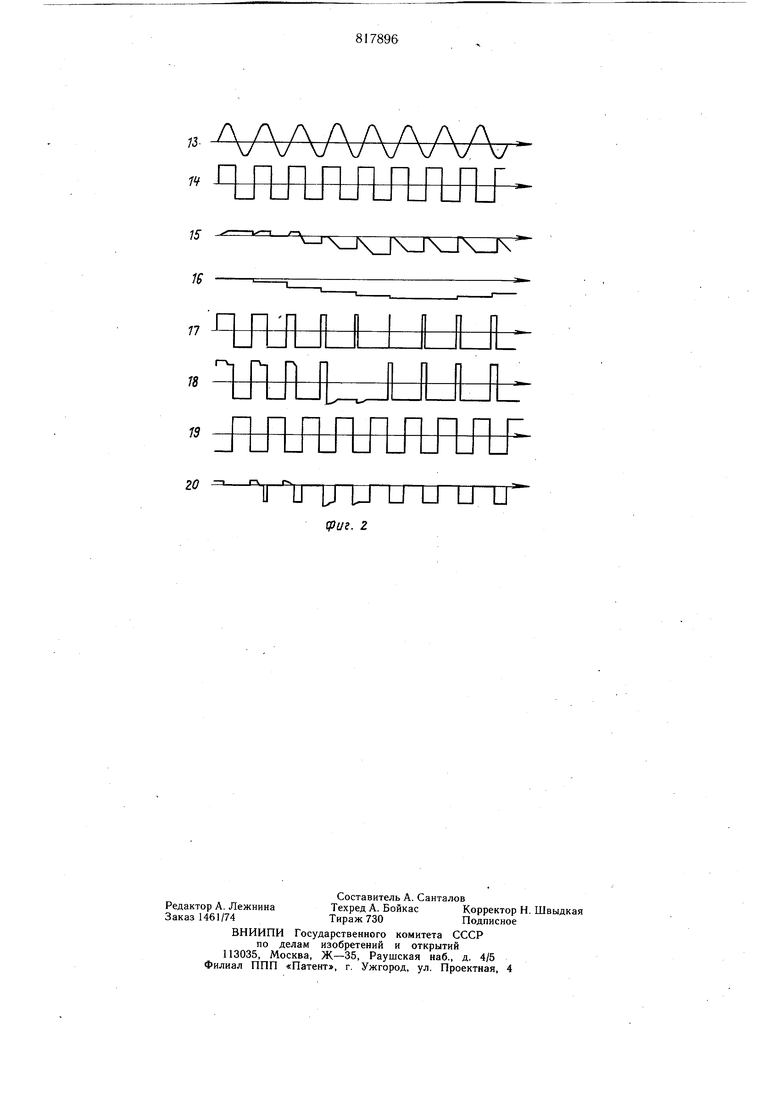
Наиболее близким по технической сущности к предлагаемому является ВД, содержащий собственно многофазную синхронную машину, коммутатор со входами управления, сельсин-фазовращатель на валу двигателя. многофазный . источник питания сельсина и преобразователи «Фаза-длительность импульсов на входах коммутатора 3. Каждый уиз преобразователей выполнен по типу двухтактного потенциального узла совпадения сигналов однофазного датчика и одного из напряжений питания сельсина. Поскольку информация об угловом положении датчика поступает для всех фаз по одному каналу и узлы его преобразования являются чисто логическими, обеспечивается отсутствие искажений и запаздывание сигналов при преобразовании сигнала датчика. Недостаток известных ВД обусловлен трапецеидальным законом модуляции широтно-импульсных сигналов управления коммутатором, что снижает точность управления двигателем. Возможное улучшение закона модуляции за счет узлов геометрического суммирования двух трапецеидальных сигналов также не обеспечивает высокой точности формирования синусоидальной модуляции длительности импульсов управления. Цель изобретения - повышение точности управления двигателем. Указанная цель достигается тем, что ВД, содержаший многофазную синхронную машину, многофазный коммутатор со входами управления, сельсин-фазовраш,атель в качестве датчика положения двигателя, многофазный источник питания сельсина и преобразователи «Фаза-длительность импульсов на входах управления коммутатора, дополнительно введены измерительные усилители и интеграторы с обнуляющими ключами на входах, число дополнительных элементов равно числу фаз двигателя, а также обш,ий формирователь симметричного сигнала несушей частоты, каждый из преобразователей «Фаза-длительность импульсов выполнен из последовательно соединенных усилителя, динамического запоминающего узла и широтно-импульсного модулятора, причем каждый из усилителей по неинвертирующему входу подсоединен к выходу сельсина, а по инвертирующему входу - к выходу соответствующего интегратора, управляющий вход каждого обнуляюшего ключа и тактовый вход каждого динамичесКОГО запоминающего узла соединены с одним из выходов источника питания сельсина, вход каждого из измерительных усидителей подключен к выходу коммутатора, выход - к входу интегратора, а к входам всех измерительных усилителей подключен общий формировательсимметричного сигнала несущей частоты. На фиг. 1 дана структурная схема вентильного электродвигателя на фиг. 2 - диаграммы его работы. ВД содержит синхронную машину 1, коммутатор 2 с фазными входами управления, сельсин-фазовращатель 3 в качестве датчика положения двигателя 1 и многофазный источник 4 питания сельсина 3. К каждому /из фазных входов управления коммутатора 2 подключены преобразователи «Фаза-длительность импульсов, каждый из которых состоит из последовательно соединенных усилителя 5, динамического запоминающего узла 6 и широтно-импульсного модулятора 7, подключенного выходом непосредственно к соответствующему фазному входу коммутатора 2. Между каждым из фазных выходов коммутатора 2 и средней точкой питания его включены измерительные усилители 8, которые выходами через интеграторы 9 соединены с инвертирующими входами усилителей 5, тогда как неинвертирующие входы усилителей 5 подключены к общему для всех фаз сельсина 3. Интеграторы 9 снабжены обнуляющими ключами 10, управляющие входы которых совместно с соответствующими тактовыми входами динамических запоминающих узлов 6- соединены с соответствующими фазными выходами источника 4 питания сельсина 3. Формирователь 11 симметричного сигнала несущей частоты по выходу подключен ко всем одноименным входам измерительных усилителей 8 в противофазе к пульсациям щиротно-модулированных напряжений коммутатораа 2. Для регулирования напряжений коммутатора 2, т. е. глубины их модуляции, может быть предусмотрен множитель 12 на выходе сельсина 3. Формирователь 11 симметричного сигнала несущей частоты подключен ко всем одноименным входам измерительных усилителей 8. Устройство работает следующим образом Сигнал 13 синусоидальной формы от датчика 3 имеет ту же несущую частоту, что и сигналы 14 от источника 4, отличаясь от них лишь фазой, которая изменяется адекватно с изменением угловой координаты ротора сельсина 3 и двигателя 1. Сигнал 13 поступает на усилитель 5 вместе с сигналом 15 отрицательной обратной связи по напряжению коммутатора 2, о котором будет сказано ниже. Разность 16 сигналов 13 и 15 после усиления поступает на динамический запоминающий узел (ДЗУ) 6, который фиксирует эту разность в моменты времени, определяемые передним фронтом сигнала 14 источника 4. В результате в каждом из ДЗУ получаются ступенчатые сигналы 16, сдвинутые относительно двух других аналогичных сигналов на 120° по угловой координате двигателя 1. Эти сигналы 16 преобразуются щиротно-импульсными модуляторами (ШИМ) 7 в широтно-импульсные сигналы 17 управления коммутатором 2. Каждый из фазных сигналов 18 коммутатора 2, отличающийся от сигнала 17 управления искажениями из-за задержки в несиловых ключах, пульсациями напряжения питания, влиянием конечного сопротивления транзисторов и шунтирующих диодов (что показано в утрированном виде), поступает на измерительный усилитель 8
вместе с симметричным сигналом 19, благодаря чему гармоники несущей частоты в несколько раз или в несколько десятков раз ослабляются. Сигнал 20 усилителя поступает на интегратор 9, обнуляемый в начале каждого такта по несущей частоте, в результате чего сигнал 15 интегратора 9 к концу каждого такта имеет значение, пропорциональное гладкой составляющей 18 выходного напряжения коммутатора 2. Сигнал 15 интегратора 9 является сигналом обратной связи, поступающим на инвертирующий вход усилителя 5.
Такое построение схемы ВД обеспечивает повыщение точности управления главным образом за счет сочетания динамических запоминающих узлов 6, фиксирующих сигналы лищь в дискретные моменты времени, и обнуляемых интеграторов в цепи обратной связи, обеспечивающих в заданные дискретные моменты времени точные, т. е. без запаздывания пульсаций, помех и т. д., значения сигналов обратн.ой связи по гладкой составляющей.
Применение такого ВД позволяет повысить точность управления его угловым положением в десять и более раз, что подтверждается экспериментально.
Формула изобретения
Вентильный электродвигатель, содержащий многофазную синхронную мащину, многофазный коммутатор со входами управления, сельсин-фазовращатель в качестве датчика положения двигателя, многофазный
ИСТОЧНИК питания сельсина и преобразователи «Фаза-длительность импульсов на входах управления коммутатора, отличающийся тем, что, с целью повышения точности управления двигателем, в него дополнительно введены измерительные усилители и интеграторы с обнуляющими ключами на входах, число дополнительных элементов равно числу двигателя, а также общий формирователь симметричного сигнала несущей частоты, каждый из преобразователей «Фаза-длительность импульсов выполнен из последовательно соединенных усилителя, динамического запоминающего узла и щиротно-импульсного модулятора, причем каждый из усилителей по неинвертирующему входу подсоединен к выходу сельсина, а по инвертирующему входу - к выходу соответствующего интегратора, управляющий вход каждого обнуляющего ключа и тактовый вход каждого динамического запоминающего узла соединены с одним из выходов источника питания сельсина, вход каждого из измерительных усилителей подключен к выходу коммутатора, йыход.- к входу интегратора, а к входам всех измерительных усилителей подключен общий формирователь симметричного сигнала несущей частоты.
Источники информации, принятые во внимание при экспертизе
Л A A Л Л Л Л Л . : vvvyvvvvv
ытяплпг4fH
77
Ш
19
пллпллг
13
20
iruVi U U LTU
q}Ui. 2
t
