Изобретение относится к электротехнике, а именно к управляемому электроприводу переменного тока, и может быть использовано, в частности, при созданиии низкоскоростных следящих систем с исполнительными двигателями двойного питания.
Цель изобретения - повышение точности регулирования углового положё- ния ротора двиг ателя двойного питания
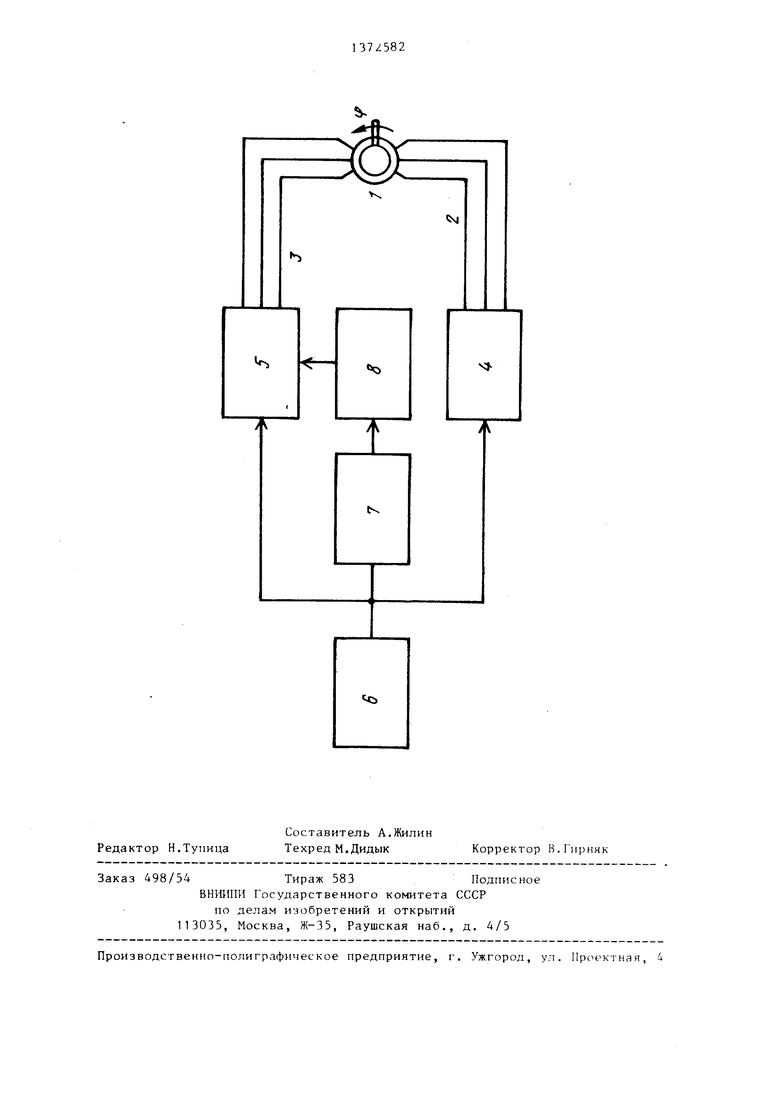
На чертеже представлена функдио- нальная схема электропривода с двигателем двойного питания.
Электропривод содержит двигатель 1 двойного питания обмоткой 2 возбуждения и обмоткой 3 управления, подключенными к выходам инверторов 4 и 5 соответственно. Выход задающего генератора 6 подключен к входам задания частоты инверторов 4 и 5 и к входу блока 7 задания приращения угла поворота. Выход блока 7 задания приращения угла поворота соединен с входом блока 8 регулирования фазового сдви- га, подключенного выходом к входу регулирования фазы инвертора 5.
Способ регулирования углового положения ротора осуществляют следующим образом.
Каждую из двух многофазных обмоток двигателя двойного питания запитыва- ют от отдельного источника питающего переменного напряжения. Задают частоты указанных питающих переменных нап- ряжений одинаковыми, устанавливая тем самым режим синхронного стояния двигателя двойного питания.
В начале регулирования углового положения ротора в пределах одного электрического периода устанавливают фазовый сдвиг между питающими переменными напряжениями, величина которого пропорциональна требуемому углу поворота ротора и коэффициенту элек- трической редукции.
После этого вновь устанавливают режим синхронного стояния двигателя двойного питания, устанавливая частоты яитающих переменных напряжений одинаковыми.
Рассмотренньп способ позиционирования двигателя двойного питания фактически реализует шаговый режим работы с шагом, кратным задаваемому фазо вому сдвигу. В начале и в конце регулирования двигатель двойного питания находится в режиме синхронного стояния за счет равенства частот питания обеих обмоток. При изменении фазового сдвига возникает мгновенный импульс момента, приводящир к появлению ускорения частоты вращения и повороту ротора на заданный угол. Изменение фазового сдвига означает фактически разовое изменение одного периода регулируемого напряжения, т.е. изменение его частоты на этом периоде . Однако уже на следующем периоде значение частоты восстанавливается, а при равенстве частот двигатель находится в режиме синхронного стояния, поэтому ротор останавливается и фиксируется в новом положении.
Таким образом достигается точное позиционирование двигателя без введения обратной связи по углу пово- |рота.
В частном случае при питании двигателя широтно-модулированным напряжением фазовый сдвиг изменяют дискретно через фиксированные интервалы между тактовыми импульсами (т.е., через интервалы, кратные периоду тактового генератора широтно-импульсно- го модулятора). В этом случае по своим характеристикам электропривод двигателя двойного питания оказывается похож на дискретный электропривод с щаговым двигателем.
Вынужденная составляющая частоты вращения в двигателе в общем виде пр различных частотах питающих напряжений определяется следующим выражением:
u;p(t)
W, (t) - U)j(t)
К
где
время;
частота вращения ротора (jj-, и U),- круговые частоты напряжений возбуждения и управления соответственно jКр - коэффициент электрической редукции (для двигателя на основе асинхронного двигателя с фазным ротором коэффициент электрической редукции равен числу пар полюсов обмотки статора, а для двигателя с электромагнитной редукцией скорости - числу зубцов ротора).
Частоты питающих напряжений задают одинаковыми, т.е. и, ш , поэтому в соответствии с (1) ротор двигателя неподвижен (режим синхронного стояния). Формулу для угла поворота ротора получают, интегрируя выражение (1):
pVLy - I (x)p(t )dt -Lf(,(tJ
ы ( -t-
p(t) -- J,(t) ---i/,(tj + c/p., , (2)
К
К
где
ц - начальный угол поворота
р. о
ротора;
О и if - текущие значения фаз напряжений возбуждения и управления соответственно (измерение всех углов ведется относительно общей оси координат, связанной со статором).
В процессе работы из-за изменения параметров инверторов фазовые сдвиги l/Дt) и (j(t) могут меняться, но при жесткой синхронизации частот возбуждения и управления закон изменения фаз во времени всегда один и тот же: ) c/(tj ti (t). Поэтому обеспечивается неподвижное состояние ротора - режим синхронного стояния.
Если одному из фазовых сдвигов, например Lf , придать некоторое дополнительное приращение л t/(воздействуют только на напряжение управления, оставляя параметры напряжения возбуждения неизменными), т.е. законы изменения фаз во времени становятся следующими:
Lf,(t) U(t;
.(t) (/(t + ji/ ,
(3)
TO в соответствии с выражением (2) происходит перемещение ротора на угол, пропорциональный этому приращению фазового сдвига и обратно пропорциональный коэффициенту электрической редукции. Это означает, что задаваемое приращение фазового сдвига должно быть пропорционально требуемому углу поворота и коэффициенту электрической редукции.
Поскольку частоты возбуждения и управления всегда поддерживаются одинаковыми, сразу после окончания поворота двигатель вновь переходит в режим синхронного стояния. Приращение фазы фактически является приращением одного из периодов напряжения управления, т.е. изменением его частоты. Это приводит к появлению мгновенного импульса частоты вращения. Однако уже на следующем периоде частота напря
10
20
25
30
35
40
45
50
55
жения управления восстанавливается и вновь становится равной частоте напряжения возбуждения. Ecjui импульс частоты вращения бьш таким, что двигатель не выпал из синхронизма (а это всегда может быть обеспечено вы- бором элементарного приращения Лазы), то ротор поворачивается на угол Л((/. и останавливается. Если продолжать постоянно изменять фазовый сдвиг у, в соответствии с (3), то это означает фактически изменение частоты напряжения управления uv, и возникает постоянное вращение ротора в соответствии с (1), что соответствует обычному режиму работы двигателя с разными частотами питания.
Регулирование с помощью изменения фазового сдвига имеет то преимущество перед обьмным регулированием (путем изменения частоты питания), что наиболее точно соответствует требованиям следящих систем, в которых требуется управлять непосредственно углом поворота, а не частотой вращения (управление частотой вращения также бывает необходимо в переходных режимах, но имеет подчиненньи характер).
Предлагаемый способ обеспечивает прямое управление именно углом поворота, минуя операции задания частоты вращения изменения частоты, измерения углового положения и выдачи команды на стопорение двигателя (.перевод его в режим синхронного стояния). Закон изменения фазового сдвига во времени может быть самым разнообразным в зависимости от заданного угла поворота, требований к динамическим и энергетическим характеристикам в переходных режимах (в том числе и требований относительно скорости отработки, если таковые имеются). Так как частоты питйния обеих обмоток всегда одинаковы, то двигатель двойного питания практически всегда находится в режиме синхронного стояния (за исключением кратких моментов перехода в новое положение), что гарантирует достижение точно заданного углового положения.
Если система управления электроприводом с двигателем двойного питания, реализующая способ позиционирования, аналоговая, то изменение фазового сдвига необходимо делать столь же малым, как и требуемое приращение угла. Однако точное задание малого
51372582
приращения фазы средствами а)1алого- ной техники иног да бывает затруднительно. В этом случае некоторые преимущества имеют двигатели с электро- м,1гнитной редукцией частоты вращения, так как для поворота на тот же угол им требуется задавать в К раз большее приращение фазы (К,, в таких
будут равными, и ротор остановится,
Поэтому приращение угла равно:
2/7 г Л
4
ALff, J Ыр (t;dt -- J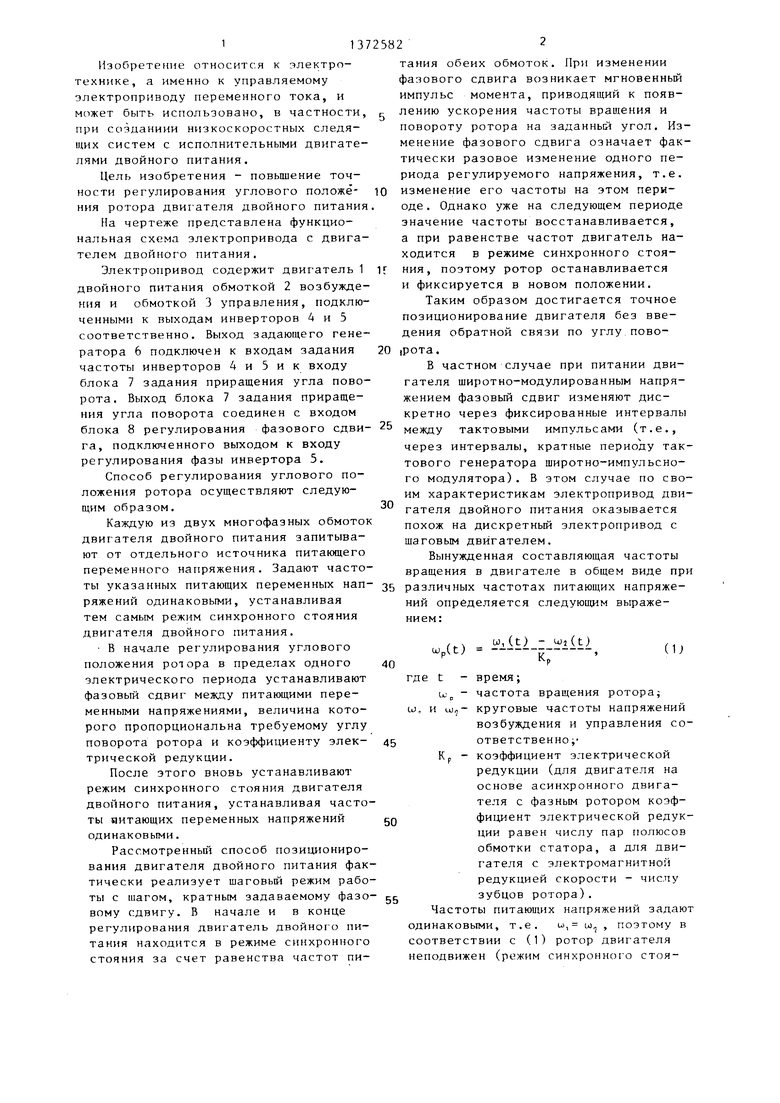
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1541752A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1985 |
|
SU1310991A1 |
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| Способ управления синхронным электродвигателем | 2019 |
|
RU2724603C1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| СПОСОБ ДВУХЗОННОГО АМПЛИТУДНО-ФАЗОВОГО ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННО-ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2375813C1 |
| Двухзонный вентильный электродвигатель | 1978 |
|
SU782069A1 |
| Электропривод | 1980 |
|
SU955484A2 |
Изобретение относится к электротехнике и может быть использовано в следящих системах. Целью изобретения является повышение точности регулирования углового положения ротора двигателя лво11НО1 о питания . Цель достигается тем, что р. способе регулирования углового положения ротора двигателя двойного питания (ЩП) частоты питающих напряжений устанавливают одинаковыми, обеспечивая режим начального стояния ЛДП, в начале регулирования в качестве регулируемого параметра одного из питающих напряжений используют фазовый сдвиг в пределах одного электрического периода. Величину фазового сдвига изменяют пропорционально требуемому углу поворота ротора и коэффициенту электрической редукции ДЛП, а режим синхронного стояния для ДДП обеспечивают установкой частот питающих напряжений равными. Цри данном способе регулируется само угловое перемещение ротора и исключаются промежуточные операции задания частоты вращения, частоты питания, измерения углового положения ротора, а вместе с тем и о1Ш1бки. ДДП все время находится в режиме синхронного стояния, что гарантирует фиксацию ротора именно в заданном положении. 1 з.п. ф-лы, 1 ил. с (Л 00 vj кэ ел 00 
/ЩП достигает нескольких десятков). В случае систем с дискретным широт- но-импульсным формированием напряжения по закону синуса задают приращение фазового сдвига кратным периоду тактовых импульсов широтно-им- пульсного модулятора. Это обеспечивает гарантированную точность воспроизведения шага, свойственную дискретным системам, причем величина элементарного шага может быть получена несьма малой.
Например, для двигателя электромагнитной редукцией частоты вращения при коэффициенте электриче ской редукции Кр 42 и числе тактовых импульсов п 2Д на периоде питающих напряжений элементарный шаг
«- R .°
р
п
Особенность способа позиционирования заключается также в том, что величина углового перемещения не за- яисит от частот питания двигателя, а определяется только приращением фазо- ного сдвига. Это можно показать следующим образом. Изменение фазового сдвига фактически означает разовое изменение периода напряжения и может, быть выражено как в долях периода (т.е., в фазоБых единицах), так и во временных единицах. Обозначим такое изменение.периода во временных единицах через (iT. Тогда скорость ротора в соответствии с (1) будет
Ко Т,
V
-4
г.р Т
1
:),
(4)
Т + ЛТ где Т - период напряжения питания до
задания приращения по фазе Tj - период напряжения возбуждения;
Tj - период напряжения управления Перемещение ротора двигателя в новое угловое положение произойдет с частотой вращения, определяемой выражением (4), за время Т + i)T, так как на следующем периоде частоты вновь
10
(5
5
0
5
0
5
0
5
0
5
Из выражения (5) следует, что приращение угла поворота пропорционально доле периода, т.е. именно приращению фазы. Это обеспечивает высокую точность позиционирования даже при колебаниях частоты питающих напряжений и облегчает построение практических систем управления электропривода.
Электропривод, реализующий предлагаемый способ, работает следующим образом. При подаче напряжений с инверторов 4 и 5 на обмотки возбуждения и управления ротор двигателя 1 устанавливается в некоторое начальное положение. Так как задание частоты обоих инверторов происходит от одного задающего генератора 6, то частоты их абсолютно одинаковы и двигатель работает в режиме синхронного стояния. Если необходимо повернуть ротор на некоторый угол, то блок 7 задания приращения угла поворота формирует соответствующий сигнал (например, в цифровой системе), блок 8 регулирования фазового сдвига преобразует этот сигнал в сигнал, изменяющий фазовый сдвиг напряжения инвертора 5 (напряжения управления) относительно первоначального состояния (или, что то же,- относительно напряжения возбуждения инвертора 4). Происходит мгновенное, на один период изменение частоты напряжения управления, возникает импульс момента, ускорения и частоты вращения, но с началом следующего периода напряжения управления его частота вновь становится равной частоте напряжения возбуждения и двигатель переходит в режим синхронного стояния. Его ротор тормозится и фиксируется в новом положении. Далее процесс продолжается аналогично.
Блок 8 регулирования фазового сдвига выполняется в зависимости от
того, как регулируется фазовый сдвиг в инверторе 5. В частности, если инвертор 5 выполнен с использованием широтно-импульснон модуляции, которая осуществляется путем сравнения некоторого напряжения постоянного тока с опорным синусоидальным, то можно менять фазу этого опорного синусоидального напряжения с помощью обычных фазосдвигающих устройств.
Таким образом, в сравнении с известным предлагаемый способ позиционирования обеспечивает повышенную точность позиционирования, так как регулируется само угловое перемещени ротора и исключаются промежуточные операции задания частоты вращения, частоты питания, измерения углового перемещения и формирования сигнала о стопорении двигателя, а вместе с тем и соответствующие ошибки. Угол поворота согласно предлагаемому способу не зависит от частот питания обмоток (единственным условием является равенство этих частот, которое легко обеспечивается), а лишь от приращения фазы, которое в дискретных системах может быть фиксированным. Этим обеспечивается хорошая повторяемость шага двигателя при отработке перемещений. Двигатель двойного питания все время находится в режиме синхронного стояния (кроме кратких моментов перехода на новый шаг), что гарантирует фиксацию ротора именно в заданном положении, в то время, как при известном способе ротор может отклониться от заданного положения, если сигнал о стопорении двигателя придет с некоторым неизбежным запаздыванием.
Кроме того, применение предлагаемого способа позволяет создавать точные следящие системы без специально0
5
0
5
0
5
0
го датчика обратной связи по углу, что уменьшает массу и габарит, всей установки.
Формула изобретения
4i
v
| Способ регулирования углового положения ротора двигателя двойного питания | 1985 |
|
SU1310991A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1983 |
|
SU1100702A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
