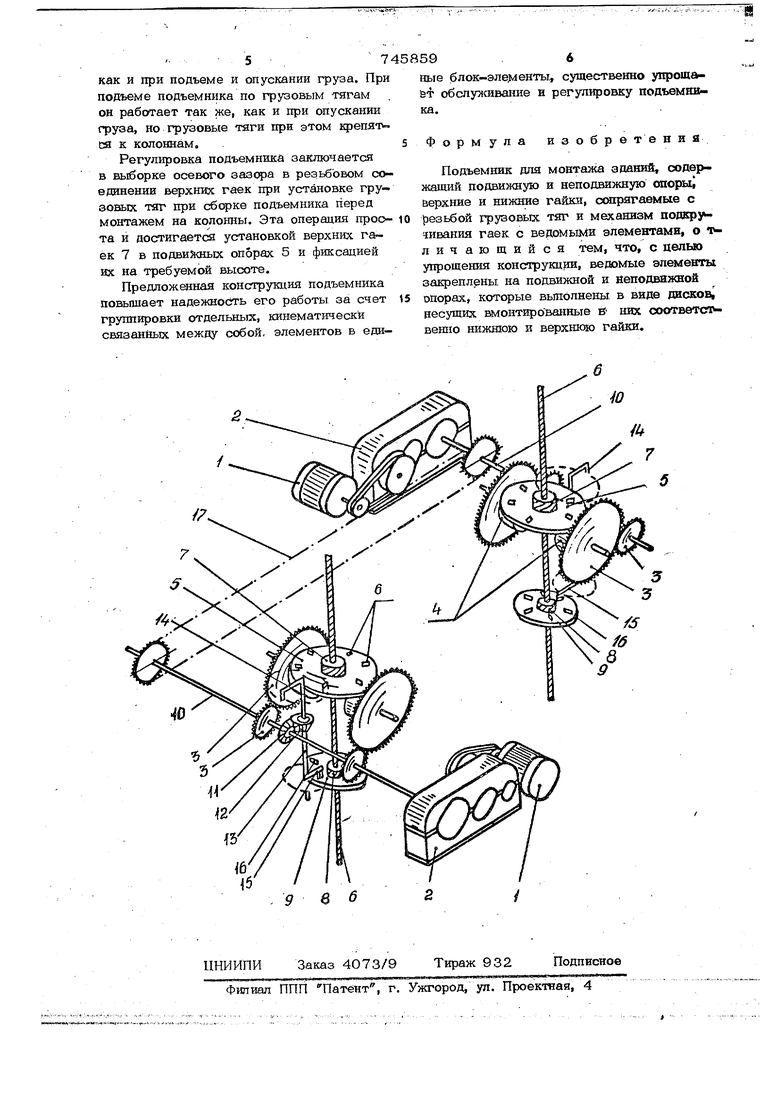
Изобретение относится к подъемнотранспортньш машинам, в частности к механизмам дня подъема и опускания плит перекрытий (этажей) и крупногабаритны конструкций при возведении зданий и сооружений методом подъема по колоннам или направлйющим стойкам. Известно устройство для подъема стро ительных элементов больших размеров типа плит перекрытий и этажных блоков, включающее два качающихся рычага, ве| тикально перемещаемые с помощью двух эксцентриков, закрепленных на одном валу. Верхние и нижние гайки, установленные на грузовых тягах, опираются последовательно на подвижные элементы (ры чаги) и неподвия ые элементы рамы. Недостатке устройства является боль щая металлоемкость подъемника, вььзванная конструктивными особенностями, где, в частности эксцентриковый вал работает на 1фучение со сложшзпи изгибом, а качающийся рычаг - на изгиб с боль щим расстоянием между опорами. Кроме того, для крепления элементов механизма подкручивания Гаек необходимо вьшолнение довольно металлоемкостной юбки, а вэ& цение в кинематическую цепь утфавпёйия маточньП(ЛИ гайками цепньтх передач снижает надеяаяость работы, подъемника. Наиболее близким техническим решением является подъемник для монтажа зданий, включающий подвижную и неподвижную опоры, нижние и верхние гайки, сопряга мые с резьбой грузовых тягах и мехавиам подкручивания гаек с ведомымиме элементами. Недостаткмд конструкции является н& надежность работы подъемника, вьфажах щаяся в частых перекосах подъемника в процессе подъема, что приводит к неравнсмерной нагрузке на грузовые тяги. Кроме того, мшя бэлементная конструкция механизмов подъема в механизмов пошфучввания гаек вьтзывает большую трудоемкость в изготовлении посп емнвка и его невысокую ремонтосиособность.. Цель изобретения - повышение надея ности работы подъемника. Поставленная цель достигается тем, что элементы за1феплекы на nofH важной и неподвижной опорах, которые вьь полнены в виде дисков, несущих вмонтированные в них соответственно нижнюю и верхнюю гайки, . Кроме того, для упрощения обсйуяшвания и регулировки подъемника внутренняя резьба верхних гаек вьтолцена с гарантированным осевым задоре относительно резьбы грузовых тяг. Размещение гаек в теле опор, а также заюэепление на последних ведомых алементов исключает многоэлементность кон струкций, что повьпиает надежность работы, подъемника. На чертеже изображена кинематическая схема подъемника. : , Подъемник содержит электродвигатели 1 с редукторами 2, системы шестерен 3 с эксиентриками 4, воздействующие на цодвижные опоры 5, грузовые тяги 6с верхними 7 и нижними 8 гайками, которые вмонтированы соответственно в подвижные и неподвижные 9 опоры. Внутренняя резьба верхних гаек 7 вьшопнена с гарантированным зазором для упро ,щения обслуживания и рег)глировки подъем ника. Верхние гайки вьшолненьг регулируемыми по высоте и связаны с подвиишыми сяторами 5, например посредством шлицевого соединения., Для фиксации после ре-, гулировки подъемника верхних гаек 7 в подет1жных опорах 5 предусмотрены стопорные устройст &а (на чертеже детали соединения не показаны).. Приводные валы 10 через зубчатые ко леса 11 и 12 связаны с механизмами подкручивания гаек, которые вкйейчйют валы 13 с водилами 14 и 15 последовательно вращающих ведомые элементы 16. Ведомые элементы 16 закршлены на подвижных 5 и неподвижных 9 (яорах. Для ис ключения перекоса подъемника В кинематическ5пю схему введена система синхро низации 17, связывающая приводные 1О. Работа подъемника при подъеме груза. Подъемник монтируют на колонне и устанавливают на шкворень (на чертеже не показано), прсятущенный через отверсти в колонне. Электродвигатели 1 включа « ются одноЕременно. Вращение от них через редукторы 2, валы 10 и системы щёстерен 3 сообщается эксцентрикам 4. Вращаясь, эксцентрики 4 поднимают подвижны опоры 5 с вмонтированными в них верхними гайками 7 и, через их посредство грузовые тяги 6 с закрепленным на них грузом. В это же |фемя нижние гайки 8, управляемые водилами 15 через ведомые Элементы 16 прсяускают грузовые тяги 6 на величину их полного подъема эксцентриками 4. Продолжая вращаться, эксцентрики начинают опускать подвижные опоры 6 благодаря потере контакта внут ренней резьбовой части гаек 7 с резьбовой грузовых тяг 6, а tpya фиксируется, при помощи нижних гаек 8. Освобожденные от нагрузки подвижные опоры 5 вращают ся водилами 14 посредством ведомых эл&ментом 6 и опускаются вниз по грузовым тягам 6. Далее цикл пoвтqpяeтcя. В зависимости от количества оборотов эксцентриков 4 груз может быть поднят на заданную OTVметку. Работа подъемника при опускании груза. Для работы в этом режиме необходимо реверсировать электродвигатели 1. В начальный период груз зафиксирован нижними гайками 8. Вращаясь, эксцентрики 4 начинают поднимать подвижные опоры. 5 без нагрузки, что возможно благодаря наличию гарантированного осевого зазора в резьбе верхних гаек 7 и отсутствию непосредственного контакта с резьбой грузовых тяг 6. При этсй, водила 14, взаимодействуя с ведомыми элементами 16 успевают переместить подвижные опоры 5 по грузовым тягам 6. Контакт между водилами 14 и ведомыми элементами 16 теряется. Эксцентрики 4 вращаясь, продолжают подъем опор 5, которые выбирают гарантированный осевой зазор в резьбе верхних гаек 7 и открывают неподвижные опоры 9 от рамы (на чертеже не показаны) подъемника. Нагрузка от груза переложена на подвижные опары 5, котс ые опираются на эксцентрики 4. Эксцентрики, продолжая вращаться, начинают опускать подвижные опорь 5 и, соответст венно, грузовые тяги 6 вместе с подв&щенным к ним грузом. Одновременно водила 15 через элементы 16 проворачивают неподвижные опоры 9, которые, вращаяоь, пропускают вниз грузовые тяги 6. Далее цикл повторяется. За один оборот эксцентриков груз опускается на опредеенную величину, а в зависимости от колиества оборотов на нужную отметку. При подъеме и опускании груэовьпс тяг без груза подъемник работает так же,
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник для перемещения перекрытий зданий и крупногабаритных конструкций | 1974 |
|
SU525293A1 |
| Винтовой подъемник | 1988 |
|
SU1627502A1 |
| ГРУЗОВОЙ ПОДЪЕМНИК | 2001 |
|
RU2210525C1 |
| Грузовая тележка крана | 1986 |
|
SU1444286A1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| Устройство для монтажа плит перекрытий зданий и сооружений, возводимых методом подъема по ядрам жесткости | 1988 |
|
SU1581820A2 |
| ГИДРАВЛИЧЕСКИЙ ПОДЪЕМНИК ДЛЯ ПЕРЕМЕЩЕНИЯ | 1966 |
|
SU179895A1 |
| ПОДЪЕМНИК ДЛЯ ПРЯМОЛИНЕЙНЫХ ЛЕСТНИЧНЫХ МАРШЕЙ | 2012 |
|
RU2509711C2 |
| Устройство для вертикального перемещенияКРупНОгАбАРиТНыХ КОНСТРуКцийздАНий и СООРужЕНий | 1979 |
|
SU812903A1 |
| ПОДЪЕМНОЕ ВИНТОВОЕ УСТРОЙСТВО | 2022 |
|
RU2797849C1 |
