1
Изобретение относится к вычислительной технике и предназначено для использования в качестве системы программного управления намоточными или металлорежущими станками. . 5
Известна система программного управления станком, содержащая накопи-; тель с внешним и внутренним интерпо-, ляторами, причем вычислительный про- 10 цесс разделен между обоими интерполяторами таким образом, что во внутреннем интерполяторе вычисляются данные грубо распределенных опорных точек траектории движения инструмента, а 15 более простой внешний интерполятор выводит из памяти информацию об опорных точках и вычисляет дополнительные промежуточные данные, используемые для управления приводами 1 . 20
Недостатком подобных-систем является б.ольшой объем промежуточных данных, выдаваемых процессором во внешний интерполятор, что приводит к ее большой загрузке.25
Наиболее близкой к предлагаемому изобретению является импульсная интерполяционная система, содержащая вычислительную машину (ЭВМ), регистр , схемы генерации.импульсов,выход кото-30
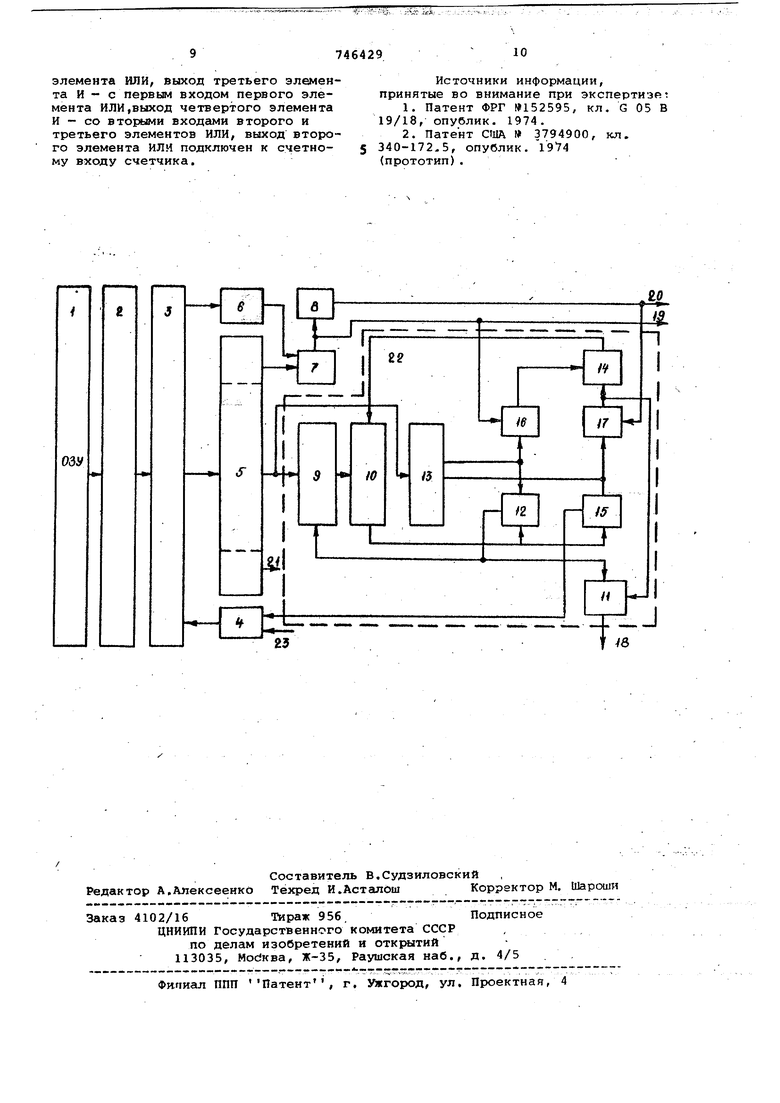
рого связан с первым входом скоростного умножителя, а вход - с ЭВМ, выход генератора через делитель частоты подключен ко второму входу скоростного умножителя, выход последнего подключен к первым входам элемента И, первый счетчик, соединенный с блоком инверсной перезаписи, выход которого подключен ко второму входу элемента И, выход элемента И через блок усреднения подключен к кольцевому счетчику аналогично для второй координаты - выход элемента И связан со входом блока усреднения и вторым входом второго счетчика, а выход блока усреднения - со вторым кольцевым счетчиком, выхол первого счетчика подключен к первым входам элемента И первой координаты и элемента И, общего для обоих координат, а выход второго счетчика соединен с первым входом элемента И второй координаты и вторым входом общего элемента И, третий вход которого связан с прямым выходом триггера, обратный выход которого ев язан со вторыми входами элемента -И первой и второй координат и с третьим входом общего, элемента И,вход триггера связанс выходом ЭВМ, а выходы последних трвэс элементов И связаны со входом ЭВМС. Однако при построении системы воспроизведение приращений по координатам внутри грубо распределенных опор ных точек заканчивается не одновременно, что требует для повышения точ ности работы применения специальных усреднителей, усложняющих систему. Цель изобретения - расширение области применения системы. Это достигается тем, что в многоканальный- интерполятор для программного управления многокоординатным станком, содержащий, управляемый дел тель частоты, управляющий вход которого подсоединен к первому выходу регистра, информационный вход - к выходу генератора импульсов, а выход - ко входу фиксированного делителя частоты, первый элемент ИЛИ, подключенный выходом ко входу вычислителя, в каждом канале интерполяции блок инверсной перезаписи информации, пер вый вход которого соединен с соответ ствующим выходом регистра,-а выход с первым входом счётчика, выходы вычислителя подключены ко входам генератора импульсов и регистра, введены Дешифратор, второй и третий элементы ИЛИ и четыре элемента И, причем вход дешифратора соединен с соответствующим выходом регистра, первый выход - с первыми входами первого и ВТОРОГО элементов И, а второй выход - С первым входомтретьего и четве:ртого элемента И, вторые входы первого и тпетьего элемента И, соединены с выходом счётчика, второй вход второго элемента И - с выходом управляемого делителя частоты, второй вход четвер того элемента И - с выходом фиксированного делителя частоты, выход первого элемента И соединен со стробирующим входом блока инверсной информации и с первым входом третьего элемента ИЛИ, выход второго эламента И соединен с первым входом BTopof o элемента ИЛИ, выход третьего элемента И - с первым входом первого эле мента ИЛИ, выход четвертого элемента И - со вторыми входами второго и тре тьего элементов ИЛИ, выход второго элемента ИЛИ подключен к счетному вхо ду счётчика а выход третьего элемента ИЛИ.является выходом соответствующего канала интерполяции. Блок-схема интерполятопа представ .лена на чертеже. Интерполятор содержит оперативное запоминающее устройство (ОЗУ) 1, сое диненное с процессором 2, интерфейс ввода-вывода 3, первый элемент ИЛИ 4 регистр 5,; генератор б импульсов, управляемый делитель 7 частоты, фиксированный делитель 8 частоты, блок 9 инверсной перезаписи.информации, счет чик 10, третий элемент ИЛИ 11, первый элемент И 12, дешифратор 13, второй элемент ИЛИ и третий 15, второй 16 .и четвёртый 17 Элементы И, выходы 19-2 в другие каналы интерполяции 22 и ход 23,соединенный через управляемый елитель 7 частоты с фиксированным деителем 8 частоты, выходы которых явяются шинами 19 и 20, общими для сех каналов интерполяции. Один канал нтерполяции 22 содержит блок 9 инерсной перезаписи информации, соедиенный со счетчиком 10, деишфраторОм 3, первым входом третьего элемента, ЛИ 11 и выходом первого элемента . Счетный вход счетчика ГО соединен с выходом второго элемента ИЛИ 14, счетный выход - со вторыми входами первого элемента И 12 и третьего элемента И 15, а первый и второй выхода дешифратора 13 соединены с первыми входами соответственно первого элемента И 12 и второго элемента И 16, третьегс элемента И 15 и четвертого элемента И 17, причем вторые входы второго и четвертого элементов И соединены соответственно с выходом управляемого делителя 7 и выходом фиксированного делителя 8,которые являются общими для соответствующих элементов всех каналов ин- : терполяции. Выход третьего элемента И 15 соединен d первым входом элемента ШШ 4, другие входы 23 которого соединены с выходами соответствующих элементов И других каналов, выход второго элемента И 16 соединен с первым входом второго элемента ИЛИ 14, а выходы первого,и четвертого элементов И соединены соответственно с первым и вторым входами, элемента ИЛИ 11, выход которого является выходом 18 соответствующего канала интерполяции. Выход 21 регистра 5 соединяется с аналогичными блоками 22 интерполяции по другим каналам. ОЗУ 1, процессор 2 и интерфейс 3 образуют вычислитель. Известен принцип построения предлагаемого интерполирующего блока 22. В Предлагаемой системе программного управления можно использовать многокоординатные станки, причем увеличение числа управляемых координат приводит только к соответствующему увеличению числа однотипных блоков И не изменяет структуры систем, не усложняет схему: И, не изменяет характер функционирования системы. Более того, упрощается процесс подготовки исходной информации, поскольку отпадает необходимость введения в программоноситель таких второстепенных параметров, как признак коммутации выходов, величина отношения большего приращения к меньшим. В предлагаемой системе для всех управляемых координат указывается только величина приращения в кадре и число, пропорциональное времени отработки приращений по всем координатам. Интерполятор работает следующим образом. По сигналам процессора 2 управляюие программы, хпанящиеся в ОЗУ1 в виде отдельных кадров лоследобатель но поступают на обработку в процессор. Цель обработки - разбиение в процессоре воспроизведения программы кадров, имеющих максимальное при ращение по всем управляющим координ там до 9999 импульсов, на Миникадры с максимальным прира адением в них не более импульсов (п - разрядность миникадра по одной координате например, 7 или 15 импульсов к пере даче их в интерфейс 3. Этим достига ется увеличение выходной частоты сл дования управляющих сигналов на выходе системы,, а следовательно, к точности воспроизведения программы при ограниченном быстродействии про цессора, а также упрощается оборудо вание, установленное непосредственн у станка, поскольку основную часть функции интерполирования выполняет процессор,. В полученных в результате разбиения миникадрах указывается перемещение по всем координатам и время перемещения, которое является общим для всех управляемых координат. Построение канала интерполяции 22 на делителях дает возможность исключить усреднители и добиться максимальной точности воспроизведения программы путем обеспечения равномер ного следования декодированных импульсов по всем координатам на выходах каналов интерполяции 22. С.этой целью после разбиения кад ра программы на миникадры., в процес подготовки информации для вьщачи в интерфейс, отыскивается координата с максимальным приращением в миникадре и определяется отношение найденного максимального приращения ко всем остальным приращениям в миникад ре. Найденные отношения умножаются на масштабный коэффициент д, где g - основание системы счисления (в данно случае g 2), п - число разрядов в миникадре по одной координате, например п-3. Таким образом, еслийХ, ДУ, ...,Д2 приращения в обрабатываемом миникадре,по координатам соответственно X,yj ...,г. и, например, рели дх является в данном миникадре максимальной величиной, то дл остальных координат отыскивается сле дующие величины: ду-М.о ду , Введение масштаб.н9го коэффициента, равного , обеспечивает выполнение . интерполяции при дробных значениях отношений ,... , в связи с этим ..отведенное число разрядов в интерфей се 3 и регистре 5 для одной координа ты равно удвоенной величине п. Из подготовленных таким образом .в процессоре 2 величин ДХ , ДУ , ... ЛТ, вычитается единица для упрощения получения из этих величин в дальнейшем дополнительного кода, в котором работают блоки интерполяции в этом случае дополнительный.код получаете я простым инвертированием прямого). Таким образом процессор 2 через интерфейс 3 передает в регистр 5 код, определяющий время отработки .миникадра и величины йх-1);(. Z-i) . Из регистра 5 код времени передается в управляемый делитель 7 и с помощью генератора 6 и делителя 8, имемдего фиксированный коэффициент деления g , преобразуется в частоту следования импульсов обработки миникадра, которые поступают на входы элементов И 16 и 17 всех каналов интерполяции 22 (шины 19 и 20). Однотипные к аваль интё ртГоляции 22 в обоих случаях преобразуют полученную информацию в заданное число импульсов, равномерно распределенных во времени. Определение и нас.тройка канала интерполяции 22 на один из двух возможных, режимов работы {преобразование по координате с максимальные приращением или по координате с приращением меньше максимального) выполняет дешифратор 13 и элементы И 12, 15, 16 и 17. Этим достигается построение универсального канала интерполяции 22, исключение узла коммутации выходов и сокращение, за счет исключения приказа ксяммутации координат, объема информации, передаваемой из процессора при сохранении высокой точности управления. Рассмотрим работу канала интерполяции 22 при преобразовании максимального приращения в миникадре (в нашем случае по координ ате X). После передачи информации -В регистр 5, в счетчик 10 через блок 9 заносятся дополнительнЕлй код величины Ах. Дополни.тельный код величины, являющейся макcи 4aльнoй среди подлежащих обработке, характеризуется отсутствием нулей в старших (из 2 п) разрядах, так как максимальное приращение в процессоре .не умножается на масштабный коэффициент g (например, если по координате X необходимо отработать б импульсов , то при код в регистре импульсов , то при код в регистре 5 имеет вид 101Q.OO; импульсов - (001000; для 4 -; 110000 и т,Д.).Де-. ифратор 13, включенный, на выХ|Ь5 156гистра 5 по соответствующей координате открывает в рассматриваемом случав) элементы И 15 и17. Импульсы обработки миникадра, вырабатываемые по разрйаающему сигналу из интерфейса 3 генератором 6, совместно с делителями 7 и 8 поступают на выходы 19 и 20, причем на выходе 19 частота сигналов рёшиа f 1 а на выходе 20 она уменьшается в g ра делителем 8.., йлтульсы,Появившиеся на выходе 20 через элемент И 17 проходят на входы элементов.ИЛИ 14 и 11. С выхода элеме та ИЛИ 14 они проходят на счетный вхо счетчика 10, а с элемента ,ИЛИ 11 пост пают с выхода 18 на вход следующей си темы данной координаты. С приходом на вход счетчика 10 числа импульсов, рав ного Дх / он переходит в нулевое со тояние и на выходе появляется сигнал, свидетельствующий об отработкезаданного числа импульсов. За это дремя)на вьаходе делителя 7 появляется лх , g импульсов, т.е. для число импуль сов равно 40. Сигнал переполнения сче чика 10 поступает на вход элемента И 15, открытого дешифратором 13, и далее на один из входов элемента ИЛИ 4, на который поступают сигналы конца от работки миникадра со всех управляемых координат.Сигнал с выхода элемента ИЛ 4 поступает в интерфёйс 3 и является сигналом конца отработки миникадра. По этому сигналу снимется сигнал разрешения работы генератора б и посылается новая информация в регистр 5. За время отработки ДХ сигналов по координате X с максимальным прираЩением происходит отработка заданных приращений Д V, AT, по остальным координатам У , .... Z. Рассмотрим получение ДУ сигналов п координате Y. В этом случае дешифратором 13 открьзваются элементы И 12 и 16,поскольку в хотя бы одном из них старших разрядов регистра 5 на координате.нули (например, если AV ; то при ДУ 5 ,n :b(Airf-l)f. , ; соответствующий код имеет вид 100100, если Av lTO,(/iV-l)39 , код 111001). При (код 111111) деилифратор 13 блокирует работу элементов И 12, 15, 16, 17. Импульсы, появляющиеся на шине 19, через элемент И 16 проходят на вход элемента ИЛИ 14 и далее, на счетный вход счетчика 10, в котором в начале отработки миникадра установлен обратный код величины (ду - 1 ) т.е. для Ду:г - код 011011, для AV i - код pOOllO. В моменты, когда чис ло импульсов, поступающих на вход сче чика 10 становитсяравным (оЬЪтвё ственно 10 и 40) , счётчик 10 пере- .водится в нулевое положение. акймоб разом, величины Ду ,. . ., Д7 являются коэффициентами деления, поэтому при Ду 10 каждый десятый импульс на входе счетчика 10 проходит на его выход. Импульсы, появившиеся на выходе счетчика 10,. поступают на вход элемента И 12 и далее через элемент ИЛИ 11 с выхода 18 на .вход следящий сиетемы по координате Y , а также подаются на стробирующий вход блока 9, который восстанавливает обратный код Рзгистра 5 по координате Y , Т.е. ве-i личину ( &V ) в счетчике 10. Этот процесс повторяется во время отработки всех импульсов по координате .максимальным приращением, т.е. по координате X, а поскол1 ку она быта отработана за 40 импульсов на выходе делителя 7, то при коэффициенте деления по координате Y равном 10, за это .время отрабатывается 4 импульса (для ЛУ --f , коэффициент 40 и на выхо- де присутствует 1 импульс). При этом периодичность формирования импульсов на вькоде счетчика 10 обеспечивает равномерность их распределения во времени. По другим коорд.инатам канал интерполяции 22 работает аналогично, при.чем при равенстве максимальных приращений по нескольким координатам, все они обрабатываются по алгоритму обработки координаты с максимальным приращением. Таким образом, прехшагаемаясистема обладает существенным технико- экономическим эффeктo , заключающимся в повышении точности воспроизведения программ системой при высокой скорости ее отработки по всем управляемым, координатам. Формула изобретения Многоканальный интерполятор для программного управления многокоорДинатным станком, содержащий управляемый делитель частоты, управляющий вход которого подсоединен к первому выходу регистра, .информационный вход - к выходу генератора импульсов,- а выход - ко входу фиксированного делителя часто.ты , первый элемент ИЛИ, подключенный выходом ко входу вычислителя, и в каждом канале интерполяции блокинверсной перезаписи информации, первый вход которого соединен с соответствующим выходом регистра, а выход - с первым входом счетчика, причем выходы вычислителя подключены ко входам генератора импульсов и регистра, отл.ичающийся тем, что,с целью расширения области применения устройства,в нем в каждый канал интерполяции введены дешифратор, второй и третий элементы ИЛИ и четыре элемента И, причем вход дешифратора соединен соответствующим /выходом регистра, первый выход - с первыми входами первого и второго элементов И, а второй выход - с первым входом третьего и четвертого элемента И, вторые входы первого и третьего элемента И соединены с выходом счетчика, второй вход второго элёмёнта И - .с выходом управляемогоДелителя частоты, второй вход четвертого элемента И - с выходом-фиксированного делителя частоты, выход первого элемента И соединен со стробирующим входом блока инверсной перезаписи информациии с первым входом третьего элемента ИЛИ, выход второго э леплен та И соединен с первым входом второго
элемента ИЛИ, выход третьего элемента И - с первым входом первого элемента ИЛИ|ВЫХод четвертого элемента И - со вторыми входами второго и третьего элементов ИЛИ, выход второго элемента ИЛИ подключен к счетному входу счетчика.
Источники информации, принятые во внимание при экспертизй
1.Патент ФРГ №152595, кл. G 05 В 19/18, опублик. 1974.
2.Патент США 3794900, кл. 340-172.5, опублик. 1974
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный интерполятор | 1975 |
|
SU543922A1 |
| Линейный интерполятор для цифровых двухкоординатных систем програмного управления | 1973 |
|
SU499555A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Круговой интерполятор | 1976 |
|
SU651319A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1631518A1 |
| Линейный интерполятор | 1989 |
|
SU1695267A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU746431A1 |
