Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Линейный интерполятор | 1988 |
|
SU1538166A2 |
| Линейный интерполятор для цифровых двухкоординатных систем програмного управления | 1973 |
|
SU499555A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Круговой интерполятор | 1976 |
|
SU651319A1 |
| Функциональный интерполятор | 1981 |
|
SU991374A1 |
| Устройство программного управления | 1984 |
|
SU1246055A1 |
| Линейный интерполятор | 1975 |
|
SU543922A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
Изобретение относится к автоматике и вычислительной технике. Линейный интерполятор предназначен для преобразования числовой информации о приращениях координат в выходные управляющие сигналы и может быть использован в системах программного управления станками. Цель изобретения - повышение точности интерполяции и расширение области применения. Интерполятор содержит генератор задающих импульсов, регистр сдвига и счетчики приращений по координатным осям, регистр и счетчик длины интерполируемого отрезка, блок считывания программы, блок управления, логические элементы и выходные делители частоты. Достоинством интерполятора является однозначная зависимость скорости перемещения управляемого рабочего органа от частоты задающего генератора. 2 ил.
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах программного управления станками.
Цель изобретения - повышение точности интерполяции и расширение области применения.
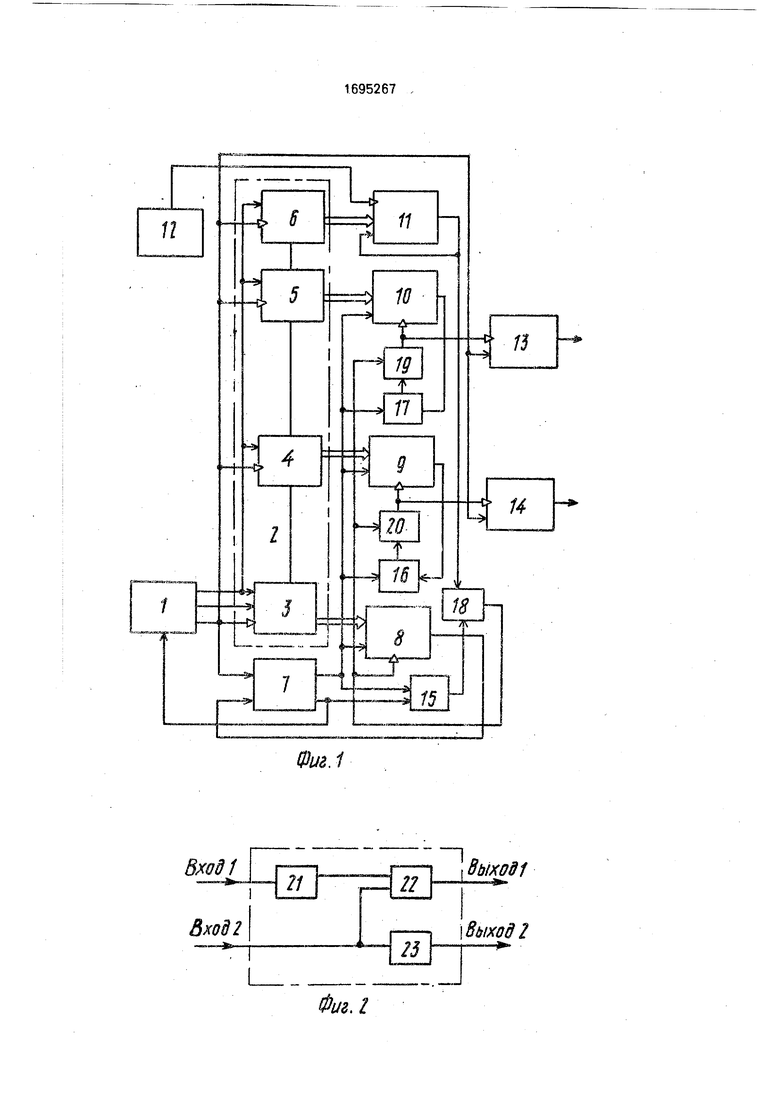
На фиг. 1 представлена функциональная схема линейного интерполятора; на фиг.
2- схема формирователя импульсов;на фиг.
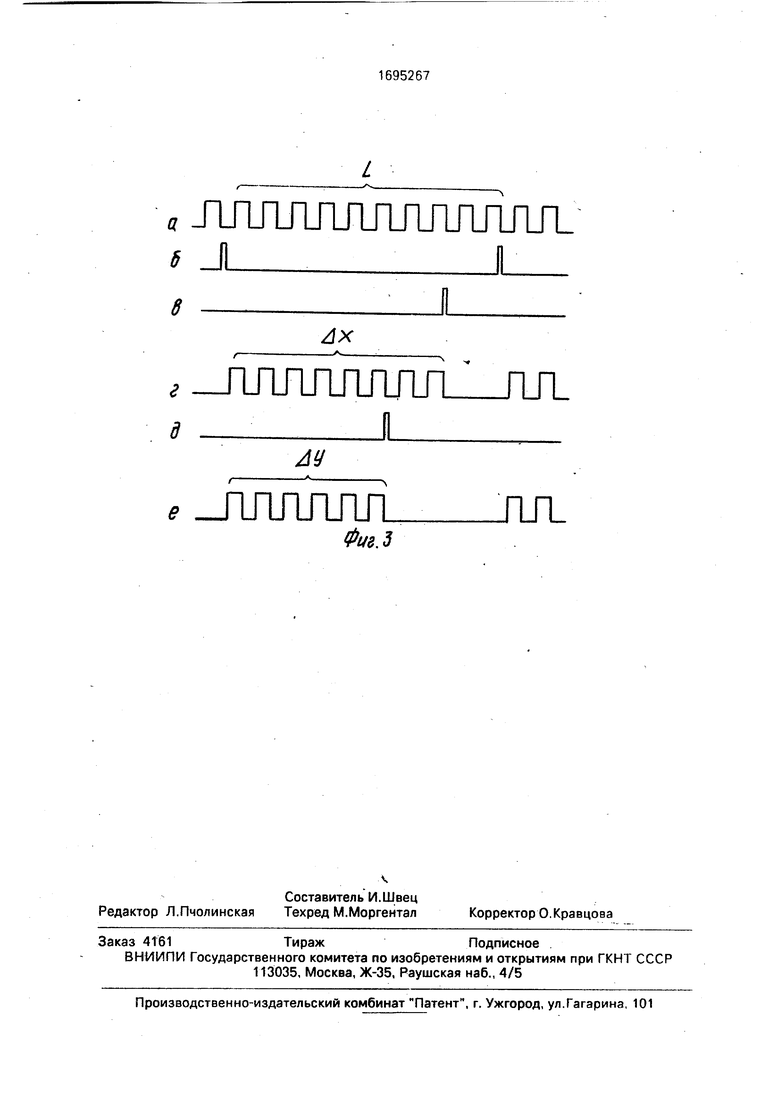
3- временная диаграмма работы.
В предлагаемом интерполяторе частота импульсной последовательности (fn) с выхода счетчика (U) пропорциональна скорости перемещения рабочего органа вдоль интерполирующего отрезка
fn U/A qk
где U - скорость вдоль интерполируемой кривой;
А- величина единичного перемещения;
q - основание системы счисления приращений координат (в данном случае q 10);
k - максимально возможная разрядность цифровых эквивалентов приращений.
Линейный интерполятор содержит блок 1 считывания программы, регистр 2 сдвига, разряды которого разбиты на четыре группы 3-6 для записи кодов L, Ду, Ах, U соответственно, формирователь 7 импульсов, счетчик 8 импульсов (счетчик L), счетчик 9 импульсов (счетчик Ау), счетчик 10 импуль- сов(счетчикДх),счетчик 11 импульсов (счетчик U), генератор 12 импульсов (постоянной частоты), делители 13 и 14 частоты, первый 15, второй 16 и третий 17 триггеры и элементы И 18-20.
Формирователь 7 импульсов содержит элемент 21 задержки с временем задержки т, элемент ИЛИ 22 и делитель 23 с коэффициентом деления q .
О Ч)
ел
ГчЭ
а
VJ
На фиг. За приведены импульсы с выхода счетчика 11; б - импульсы управления с первого выхода блока управления, поступающие на триггеры 15-17 и счетчики 8-10; в - импульсы переполнения с выхода счетчика 10 (счетчика Лх), устанавливающие триггер 17 в нулевое состояние, г - импульсы заполнения делителя 13; д- импульсы переполнения с выхода счетчика 9 (счетчик Лу), устанавливающие триггер 16 в нулевое состояние; е - импульсы заполнения делителя 14,
Интерполятор работает следующим образом.
Для правильного функционирования интерполятора необходимо обеспечить зависимость скорости перемещения рабочего органа по координатным осям от значения приращений по ним, обеспечив при этом независимость скорости перемещения вдоль интерполируемого отрезка от его длины L Для этого частота тактовых импульсов выбрана обратно пропорциональной L
Процесс формирования тактовых импульсов с частотой fT fn/L осуществляется следующим образом.
Импульсы с выхода элемента И 18 с частотой следования fn заполняют счетчик 8 импульсов. При поступлении в него импульсов в количестве, соответствующем значению L, сигнал переполнения с его выхода с частотой fn/L поступает на второй вход формирователя 7, Формирователь 7 импульсов по сигналу, поступившему на его второй вход, формирует на первом выходе импульс, являющийся тактовым.
Каждый цикл интерполяции начинается с ввода информации с кадра программы блоком 1, начальный пуск которого производится сигналом, подаваемым извне, а затем при вводе каждого кадра пуск осуществляется автоматически по сигналу с второго выхода формирователя 7 импульсов.
В каждый кадр входят коды: скорости подачи, который соответствует обратному значению скорости перемещения рабочего органа вдоль интерполируемого отрезка
-rj , приращения абсциссы Ах, приращения ординаты Ау, длины интерполируемого
отрезка L VA x + А/ .
Ввод информации в интерполятор с кадра блоком 1 осуществляется в обратном двоично-десятичном коде в младшие разряды группы 3 регистра 2 сдвига. Коды блоком 1 считываются с кадра и вводятся в регистр
2 в следующей последовательности: код скорости подачи, код Ах, код А у, код L. Таким образом, при появлении сигнала о конце ввода кадра блок 1 останавливается,
а в регистре 2 в группе 6 записан код скорости подачи, в группе 5 - коды Ах, в группе 4 - код Ау, в группе 3 - код L.
Сигналом с выхода блока 1 о конце вао- да кадра, к содержимому групп регистра 2
сдвига через их счетные входы прибавляется единица, делители частоты 13 и 14 устанавливаются к нулевое состояние. Этот же сигнал поступает на первый вход формиро- вателя 7 импульсов, при этом на его выходе
с задержкой г формируется импульс,который поступает на управляющие входы счетчиков 8-10 и единичные входы триггеров 15-17. При этом-по переднему фронту импульса
происходит перепись содержимого групп разрядов в счетчики 8-10 соответственно, а по его заднему фронту триггеры 15-17 устанавливаются в единичное состояние. Задержка на время т необходима для обеспечения суммирования единицы в гр/ппах разрядов регистра 2.
При переходе триггеров 15-17 вединич- ное состояние элементы И 18-20 открываются и импульсы с выхода счетчика 11 (фиг.
За) поступают в счетчики 8-10 и делители 13 и 14, При заполнении счетчика 10 импульс переполнения с его выхода (фиг. Зв) перебрасывает триггер 17 в нулевое состояние, при котором элемент И 19 закрывается, Число импульсов, поступивших в делитель 13 частоты (фиг. Зг) на данном такте соответствует приращению А х. При заполнении счетчика 9 импульс переполнения с его выхода (фиг. Зд) перебрасывает триггер 16 в
нулевое состояние, при котором элемент И 20 закрывается. Число импульсов, поступивших в делитель 14 частоты (фиг. Зе) на данном такте соответствует приращению Ау. При поступлении импульсов в счетчик 8
в количестве, соответствующем значению L, он устанавливается в нулевое состояние. Сигнал переполнения с его выхода поступает на второй вход формирователя 7 импульсов. На этом заканчивается один такт
работы интерполятора.
Формирователь 7 импульсов по сигналу, поступившему на его второй вход, формирует на первом выходе импульс (фиг. 36), с которого начинается следующий такт работы интерполятора. Передним фронтом этот импульс, в паузе между импульсами с выхода счетчика 11 осуществляет перепись содержимого групп разрядов 3-5 в счетчики 8-10, соответственно,- а по его заднему фронту триггеры 16 и 17 устанавливаются в
единичное состояние и подтверждается предыдущее,единичное, состояние триггера 15.
После того, как работа интерполятора повторится qk раз, на втором выходе формирователя 7 формируется импульс, передний фронт которого перебрасывает триггер 15 в нулевое состояние, при котором элемент И 18 закрывается, а задний фронт этого импульса запускает блок 1 для считывания следующего кадра программы. За qk тактов каждого цикла интерполяции на делители 13 и 14 частоты поступает Ах qk и А у . qk импульсов, соответственно, а с выходов делителей выдается Дх и Д у управляющих импульсов.
Частота следования тактовых импульсов с первого выхода формирователя 7 импульсов равна fT fn/L. При каждом такте на делители 13 и 14 частоты поступает Дх и Ду импульсов. Таким образом, за 1 с на делитель 13 поступает Ax«fn/L импульсов, а на делитель 14 - Ду fn/L импульсов. Делители 13 и 14 частоты делят частоту соответствующей импульсной последовательности на qk. Таким образом, частота импульсных последовательностей на выходах делителей
13 и 14 равна Дх - fn/L qk и Ay.fn/bgk соответственно.
Использование интерполятора позволяет при высоком быстродействии в системах программного управления обеспечить точную интерполяцию как больших, так и малых значений приращений и, кроме того, выдерживать скорость перемещения управляемого рабочего органа по ее значениям, задаваемым из технологических соображений.
Формула изобретения Линейный интерполятор, содержащий генератор импульсов, три элемента И, первый делитель частоты, три счетчика импульсов, а также блок считывания .программы, управляющий выход которого соединен с управляющим записью входом каждой из четырех групп разрядов регистра сдвига, счетный вход которых подключен к выходу Конец ввода блока считывания программы и первому входу формирователя импульсов, разрядные выходы каждой группы
разрядов регист ра сдвига соединены с группой информационных входов соответствующего счетчика импульсов, первый выход
формирователя импульсов соединен с управляющими записью входами первого, второго и третьего счетчиков импульсов и S-входами первого и второго триггеров, выходы которых соединены с первыми входа- ми соответственно первого и второго элементов И, второй вход первого элемента И подключен к выходу второго элемента И, выход первого счетчика импульсов соединен с вторым входом формирователя импульсов, второй выход которого соединен с входом Пуск блока считывания программы, информационный выход которого соединен с информационным входом младшего разряда регистра сдвига, а выход первого
элемента И соединен со счетными входами второго счетчика импульсов и первого делителя частоты, отличающийся тем, что, с целью повышения точности интерполяции и расширения области применения, в него
введены третий триггер, четвертый счетчик импульсов и второй делитель частоты, вход Установка в О которого соединен с выходом Конец ввода блока считывания программы и с входом Установка в О первого
делителя частоты, счетный вход второго делителя частоты соединен с выходом третьего элемента И и со счетным входом третьего счетчика импульсов, выход которого подключен к управляющему входу третьего
триггера, установочный вход которого соединен с S-входом первого триггера, управляющий вход которого соединен с вторым выходом формирователя импульсов, второй вход второго элемента И соединен с управляющим входом и выходом переполнения четвертого счетчика импульсов, счетный вход которого соединен с выходом генератора импульсов, а группа информационных входов - с разрядными выходами соответствующей четвертой группы разрядов регистра сдвига, выходы первого и второго делителей частоты являются выходами линейного интерполятора, выход второго счетчика импульсов соединен с управляющим
эходом второго триггера, а счетный вход первого счетчика импульсов - с выходом второго элемента И.
Фиг.1
21
8 ход 2
Фиг.1
Выход1
Выход 2
, 11ГШЛШШ1Г1ЛЛЛЛЛ. s JИ
Дх
л
JlЛJlШlГL lГl ГLГL
Я
ЛУ
. пппппп пп
Фм. 3
| Цифровой линейный интерполятор | 1976 |
|
SU579599A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Линейный интерполятор | 1975 |
|
SU543922A1 |
