На нижнем блоке установлен призматический корпус 7 матрицы. В его верхней части имеется плоская опорна поверхность 8 для размещения изгибающего металлического листа 9, на которой выполнен продольный ручей 10, располагающийся продольно относительно корпуса 7, имеющий V-образные кромки 11 и 12, соединякядиеся по радиусу с опорной поверхностью 8. Радиус кривизны кромок 11 и 12 одинаковый.
Нижняя часть пуансрна 2 имеет рабочую часть 13 V-образной формы, идентичную в вертгикальной плоскости V-образному ручью 10 матрицы.
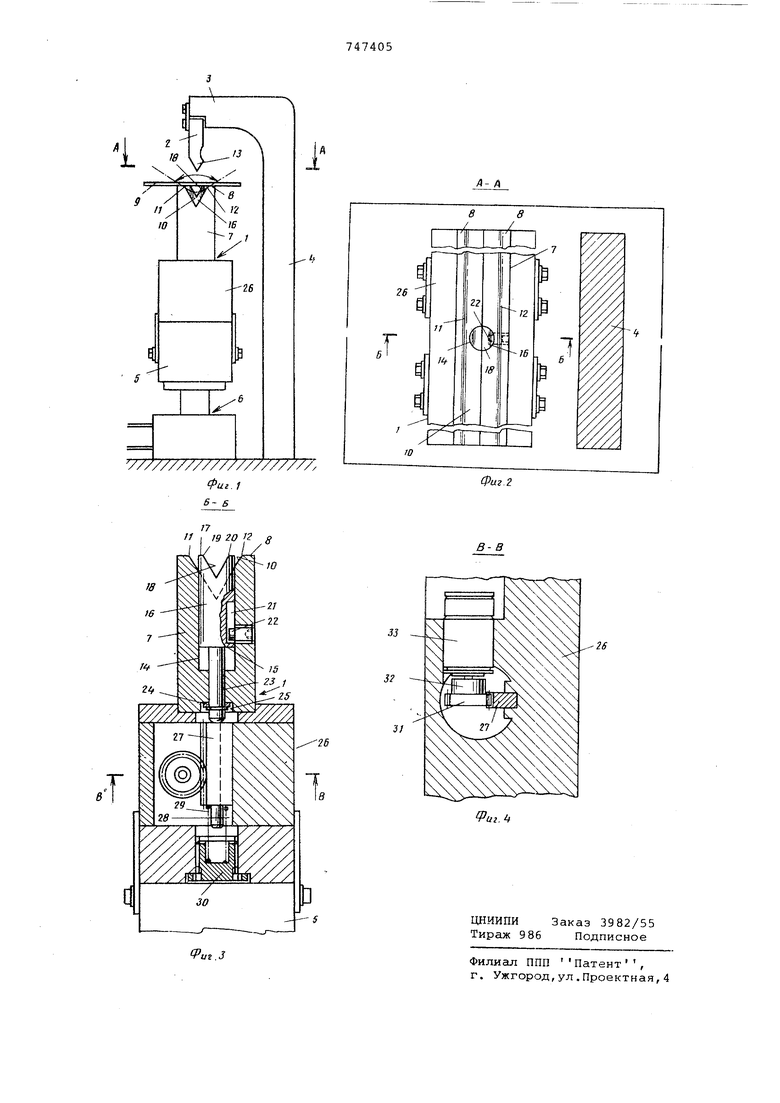
Путем размещения плоского металлического листа 9 на поверхность 8 корпуса 7 матрицы и последующим подъемом всего нижнего блока 1 с помощью средств б лист 9 входит во взаимодействие с рабочей частью 13 пуансона 2 и изгибается на угол изгиба . Этот угол будет образовываться в процессе изгиба и будет тем меньшим, чем меньше расстояние между штампом и пуансономо
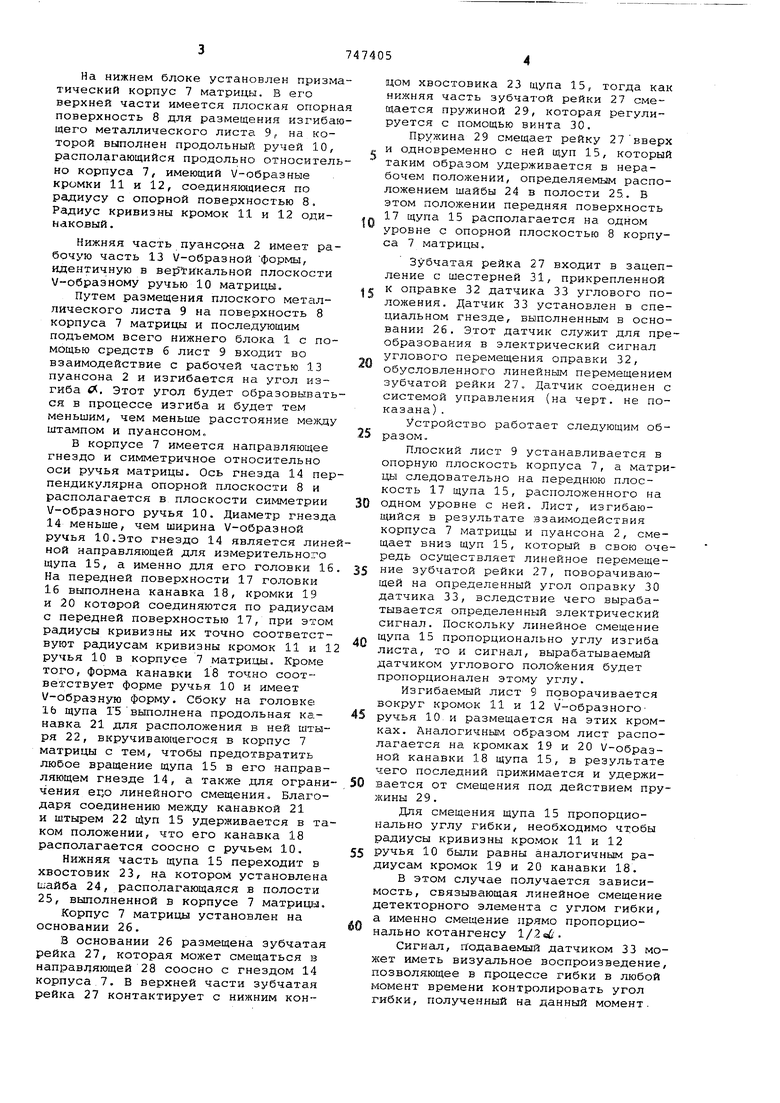
В корпусе 7 имеется направляющее гнездо и симметричное относительно оси ручья матрицы. Ось гнезда 14 перпендикулярна опорной плоскости 8 и располагается в плоскости симметрии V-образного ручья 10. Диаметр гнезда 14 меньше, чем ширина V-образной ручья 10.Это гнездо 14 является линеной направляющей для измерительного щупа 15, а именно для его головки 16 На передней поверхности 17 головки 16 выполнена канавка 18, кромки 19 и 20 которой соединяются по радиусам с передней поверхностью 17, при этом радиусы кривизны их точно соответствуют радиусам кривизны кромок 11 и 1 ручья 10 в корпусе 7 матрицы. Кроме того, форма канавки 18 точно соответствует форме ручья 10 и имеет V-образную форму. Сбоку на головке 16 щупа Г5 выполнена продольная ка.навка 21 для расположения в ней штыря 22, вкручивающегося в корпус 7 матрицы с тем, чтобы предотвратить любое вращение щупа 15 в его направляющем гнезде 14, а также для ограничения ег,о линейного смещения. Благодаря соединению между канавкой 21 и штырем 22 Щуп 15 удерживается в таком положении, что его канавка 18 располагается соосно с ручьем 10.
Нижняя часть щупа 15 переходит в хвостовик 23, на котором установлена шайба 24, располагающаяся в полости 25, выполненной в корпусе 7 матриц1а.
Корпус 7 матрицы установлен на основании 26.
В основании 26 размещена зубчатая рейка 27, которая может смещаться 13 направляющей 28 соосно с гнездом 14 корпуса,7. В верхней части зубчатая рейка 27 контактирует с нижним кон-цом хвостовика 23 щупа 15, тогда как нижняя часть зубчатой рейки 27 смещается пружиной 29, которая регулируется с помощью винта 30.
Пружина 29 смещает рейку 27вверх и одновременно с ней щуп 15, который таким образом удерживается в нерабочем положении, определяемым расположением шайбы 24 в полости 25. В этом положении передняя поверхность 17 щупа 15 располагается на одном уровне с опорной плоскостью 8 корпуса 7 матрицы.
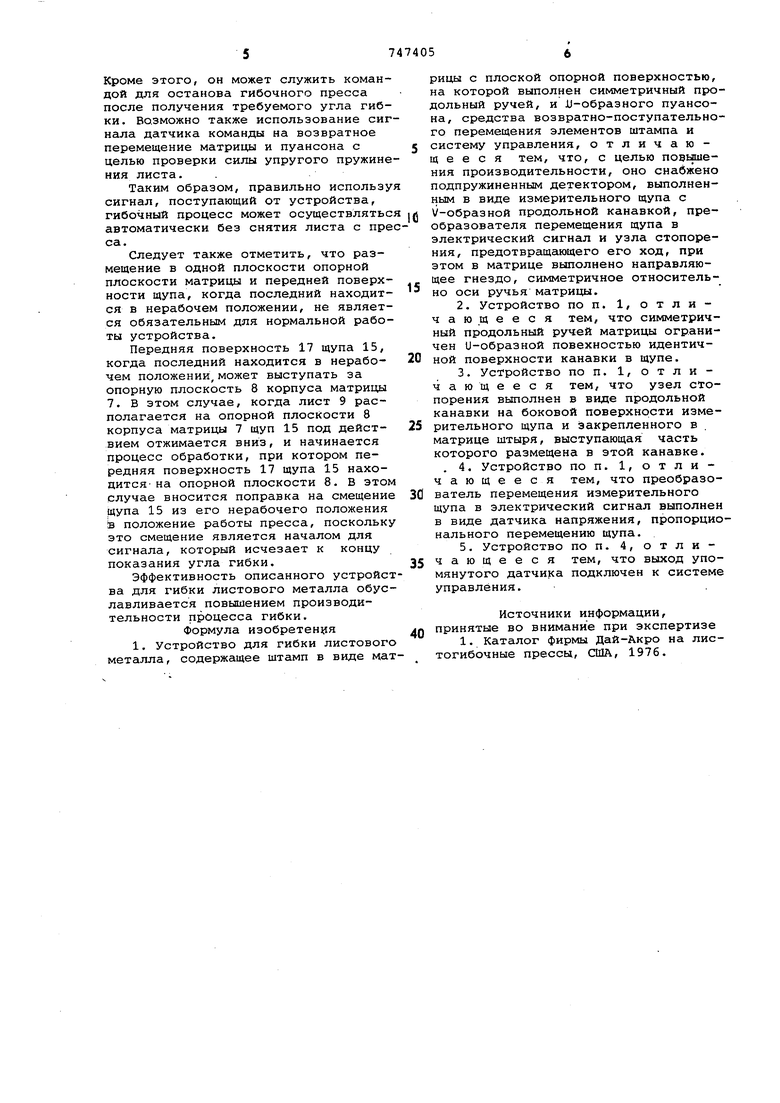
Зубчатая рейка 27 входит в зацепление с шестерней 31, прикрепленной к оправке 32 датчика 33 углового положения. Датчик 33 установлен в специальном гнезде, выполненным в основании 26. Этот датчик служит для преобразования в электрический сигнал углового перемещения оправки 32, обусловленного линейным перемещением зубчатой рейки 27. Датчик соединен с системой управления (на черт, не показана) .
5/стройство работает следующим образом.
Плоский лист 9 устанавливается в опорную плоскость корпуса 7, а матрицы следовательно на переднюю плоскость 17 щупа 15, расположенного на одном уровне с ней. Лист, изгибающийся в результате взаимодействия корпуса 7 матрицы и пуансона 2, смещает вниз щуп 15, который в свою очередь осуществляет линейное перемещение зубчатой рейки 27, поворачивающей на определенный угол оправку 30 датчика 33, вследствие чего вырабатывается определенный электрический сигнал. Поскольку линейное смещение щупа 15 пропорционально углу изгиба листа, то и сигнал, вырабатываемый датчиком углового положения будет пропорционален этому углу.
Изгибаемый лист 9 поворачивается вокруг кромок 11 и 12 V-образногоручья 10 и размещается на этих кромках. Аналогичным образом лист располагается на кромках 19 и 20 V-образной канавки 18 щупа 15, в результате чего последний прижимается и удерживается от смещения под действием пружины 29.
Для смещения щупа 15 пропорционально углу гибки, необходимо чтобы радиусы кривизны кромок 11 и 12 ручья 10 были равны аналогичным радиусам кромок 19 и 20 канавки 18.
В этом случае получается зависимость, связывающая линейное смещение детекторного элемента с углом гибки, а именно смещение прямо пропорционально котангенсу .
Сигнсш, подаваемый датчиком 33 может иметь визуальное воспроизведение позволяющее в процессе гибки в любой момент времени контролировать угол гибки, полученный на данный момент.
Кроме этого, он может служить командой для останова гибочного пресса после получения требуемого угла гибки. Возможно также использование сигнала датчика команды на возвратное перемещение матрицы и пуансона с целью проверки силы упругого пружинения листа.
Таким образом, правильно использу сигнал, поступающий от устройства, гибочный процесс может осуществлятьс автоматически без снятия листа с преса.
Следует также отметить, что размещение в одной плоскости опорной плоскости матрицы и передней поверхности щупа, когда последний находится в нерабочем положении, не является обязательным для нормальной работы устройства.
Передняя поверхность 17 щупа 15, когда последний находится в нерабочем положении, может выступать за опорную плоскость 8 корпуса матрицы 7. В этом случае, когда лист 9 располагается на опорной плоскости 8 корпуса матрицы 7 щуп 15 под действием отжимается вниз, и начинается процесс обработки, при котором передняя поверхность 17 щупа 15 нахоцится-на опорной плоскости 8. В этом случае вносится поправка на смещение 1йупа 15 из его нерабочего положения b положение работы пресса, поскольку это смещение является началом для сигнала, который исчезает к концу показания угла гибки.
Эффективность описанного устройства для гибки листового металла обуславливается повышением производительности процесса гибки.
Формула изобретения
1. Устройство для гибки листового металла, содержащее штамп в виде матрицы с плоской опорной поверхностью, на которой выполнен симметричный продольный ручей, и И-образного пуансона, средства возвратно-поступательного перемещения элементов штампа и систему управления, отличающееся тем, что, с целью повышения производительности, оно снабжено подпружиненным детектором, выполненным в виде измерительного щупа с /-образной продольной канавкой, преобразователя перемещения щупа в электрический сигнал и узла стопорения, предотвращающего его ход, при этом в матрице выполнено направляющее гнездо, симметричное относитель5но оси ручья матрицы.
2.Устройство по п. 1, отличающееся тем, что симметричный продольный ручей матрицы ограничен и-образной повехностью идентич0ной поверхности канавки в щупе.
3.Устройство по п. 1, отличающееся тем, что узел стопорения выполнен в виде продольной канавки на боковой поверхности изме5рительного щупа и закрепленного в матрице штыря, выступающая часть которого размещена в этой канавке.
. 4. Устройство по п. 1, отличающееся тем, что преобразоСватель перемещения измерительного щупа в электрический сигнал выполнен в виде датчика напряжения, пропорционального перемещению щупа.
5. Устройство по п. 4, отличающееся тем, что выход упо5мянутого датчика подключен к системе управления.
Источники информации, принятые во внимание при экспертизе
0
1. Каталог фирмы Дай-Акро на листогибочные прессы, США, 1976.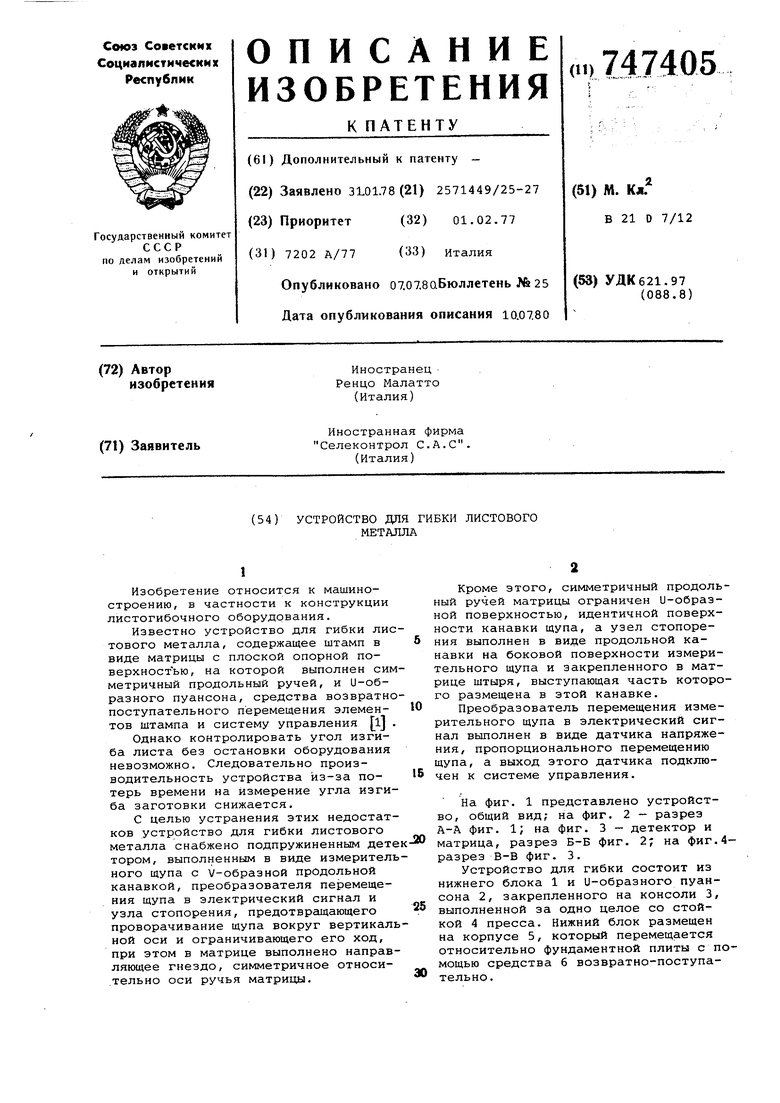
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЕ УСТРОЙСТВО ДЛЯ МАРКИРОВКИ | 2000 |
|
RU2189289C2 |
| СИСТЕМА, ОБРАЗОВАННАЯ БЕГОВОЙ ЛЫЖЕЙ И УСТРОЙСТВОМ КРЕПЛЕНИЯ ДЛЯ БЕГОВЫХ ЛЫЖ | 2006 |
|
RU2415691C2 |
| Автомат для изготовления деталей сложной конфигурации из проволоки | 1983 |
|
SU1105266A1 |
| Автомат для одновременной гибки в противоположных направлениях концов длинномерной заготовки | 1987 |
|
SU1542659A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС ДЛЯ ПРОИЗВОДСТВА КИП ИЗ СЕЛЬСКОХОЗЯЙСТВЕННОГО СЫРЬЯ | 1995 |
|
RU2108024C1 |
| СПОСОБ ОКОНЧАТЕЛЬНОЙ ФОРМОВКИ ТРУБ БОЛЬШОГО ДИАМЕТРА ИЗ U-ОБРАЗНОЙ ЗАГОТОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2340422C2 |
| КОМПЛЕКС БЕГОВОЙ ЛЫЖИ И УСТРОЙСТВА ФИКСАЦИИ БЕГОВОЙ ЛЫЖИ | 2007 |
|
RU2426573C2 |
| Устройство для фигурной кислороднойРЕзКи лиСТОВ | 1979 |
|
SU804271A1 |
| Устройство для изготовления проволочных стяжных хомутов | 1988 |
|
SU1687344A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ | 1992 |
|
RU2083305C1 |