5 1 ГчЭ 4
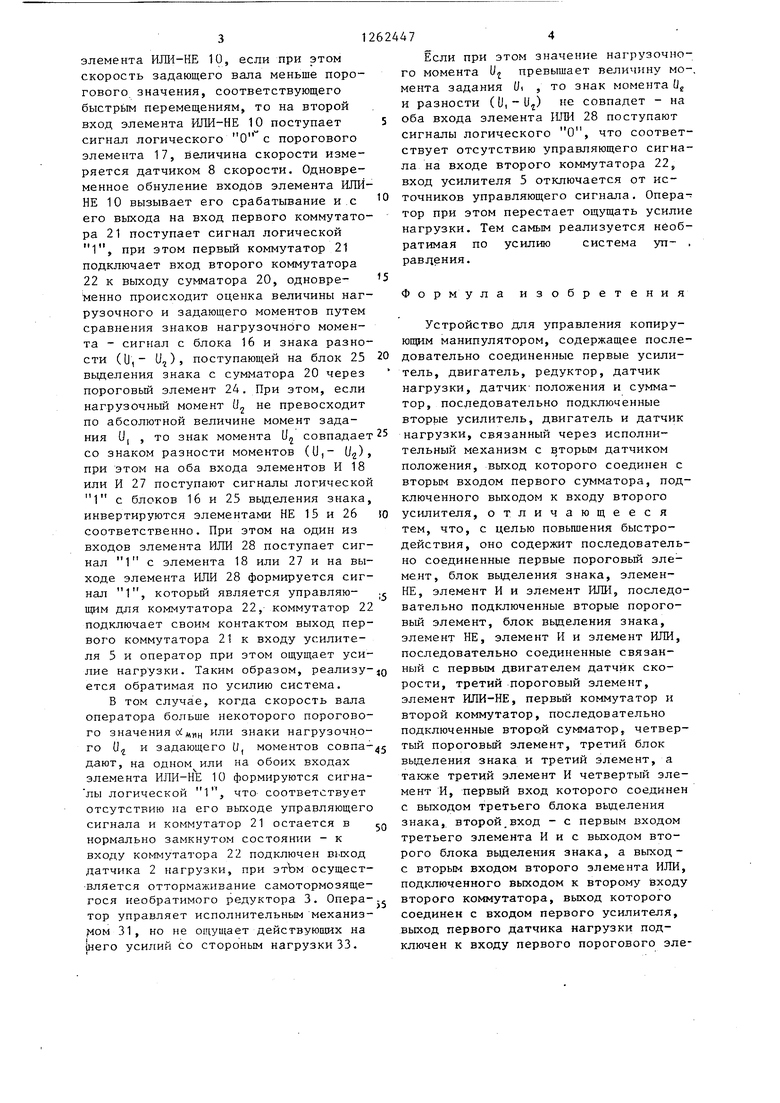
4 41 11 Изобретение относится к робототехнике и может быть использовано при соз дании копирующих манипуляторов. Целью изобретения является повьппение быстродействия устройства за счет обеспечения, автоматического переключения с обратимого по усилию режима на необратимый. На чертеже представлена функдиональная схема предлагаемого устройства. Устройство содержит задающий орган 1, первый датчик 2 нагрузки, редуктор 3, первый двигатель 4, первый усилитель 5, первый датчик 6 положения, первый сумматор 7, датчик 8 ско рости, первый пороговый элемент 9, элемент ИЛИ-НБ 10, второй пороговьй элемент 11, первый блок 12 выделения знака, первый элемент НЕ 13, первый элемент И 14, второй элемент НЕ 15, второй блок 16 выделения знака, третий пороговый .элемент 17, второй эле мент И 18, первый элемент ИЛИ 19, второй сумматор 20, первым коммутато 21, второй коммутатор 22, третий эле мент И 23, четвертый пороговьй элемент 24, третий блок 25 вьщеления знака, третий элемент НЕ 26, четвертый элемент И 27, второй элемент ИЛИ 28 второй усилитель -29, второй двигател 30, исполнительный механизм 31, вто,рой датчик 32 нагрузки, нагрузку 33, второй датчик 34 положения. Устройство работает следующим образом. Устройство может работать в двух режимах: с отражением усилия нагрузки - обратимый режим и без отражения УСИЛИЯ нагрузки - необратимый режим. Переключение с одного режима работы на другой реализуется следующим образом. Изменяют нагрузочные моменты на исполнительном и задающем сторонах манипулятора, определяют знаки сигналов, пропорциональных этим моментам, оценивают величину скорости задающего вала с помощью третьего порогового элемента 17 с зоной нечув ствительности, устанавливая тем самым пределы переключения по скорости с помощью логического переключающего устройства формируется управляющий сигнал, осуществляющий управление пр приводом задающей стороны по закону 7 K-(,/S/Uj/5U,-U2 0Aoioni°iMHH K.(U,-UilV/U,|2/Uj(EU,U OAoC.on ии K-U,V/U,/ /Uj/iU,U2-OA(i. LOWU, где и, - сигнал с датчика 2 нагрузки;сигнал с датчика 32 нагрузки;olgn - скорость задающего органа 1; К - коэффициент пропорциональности; мин ограничение по скорости. В результате на привод системы воспроизведения усилия нагрузки поступает сигнал, пропорциональный м6менту, действующему на исполнительной стороне в товремя, когда скорость вала оцератора меньше некоторого порогового значения, определяемого быстродействием оператора, причем. в остальные моменты времени, оператор ощущает противодействующее усилие нагрузки, не превосходящее по абсолютной величине момент на задающей стороне .. В первом режиме сигнал, пропорциональный моменту на задающем органе 1, поступает с датчика 2 нагрузки на блок 12 вьвделения знака через пороговый элемент 9, осуществляюпщй жесткое органичение сигнала; одновременно с датчика 32 нагрузки на блок 16 выделения знака через пороговый элемент 11 поступает сигнал, пропорциональньй моменту нагрузки на исполнительной стороне. При совпадающих знаках момента нагрузки и момента задания на оба вкода элементов И 14 или И 23 поступают сигналы логической 1 с о блоков 12 и 16 выделения знаков, .на входах первого элемента И 14 с блоков 12 и 16 предварительно инвертируются элементами НЕ 13 и 15, при этом формируется сигнал логической 1 на выходе элемента 14 при знаках моментов, соответствующих логическому О, а на выходе элемента 23 на знаках моментов соответствующих логической 1 - на выходах блоков 12 и 16 выделения знака. Свыходов элементов 14 и 23 сигнал поступает на входы элемента ИЛИ 19, на вькоде которого формируется сигнал 1 при совпадающих знаках моментов и О при несовпадающих знаках моментов, который поступает на первый вход 31 элемента ИЛИ-НЕ 10, если при этом скорость задающего вала меньше порогового значения, соответствующего быстрьгм перемещениям, то на второй вход элемента ИЛИ-НЕ 10 поступает сигнал логического О с порогового элемента 17, величина скорости измеряется датчиком 8 скорости. Одновременное обнуление входов элемента ИЛИ НЕ 10 вызывает его срабатывание и с его выхода на вход первого коммутато ра 21 поступает сигнал логической 1, при этом первый коммутатор 21 подключает вход второго коммутатора 22 к выходу сумматора 20, одновременно происходит оценка величины нагрузочного и задающего моментов путем сравнения знаков нагрузочного момента - сигнал с блока 16 и знака разности (и,- Uj), поступающей на блок 25 вьщеления знака с сумматора 20 через пороговый элемент 24. При этом, если нагрузочный момент (1 не превосходит по абсолютной величине момент задато знак момента совпадает со знаком разности моментов (U,- (1) при этом на оба входа элементов И 18 или И 27 поступают сигналы логической 1 с блоков 16 и 25 выделения знака инвертируются элементами НЕ 15 и 26 соответственно. При этом на один из входов элемента ИЛИ 28 поступает сигнал 1 с элемента 18 или 27 и на выходе элемента ИЛИ 28 формируется сигнал 1, который является управляющим для коммутатора 22, коммутатор 22 подключает своим контактом выход первого коммутатора 21 к входу усилителя 5 и оператор при этом ощущает усилие нагрузки. Таким образом, реализуется обратимая по усилию система. В том случае, когда скорость вала оператора больше некоторого порогового значения сх:мин знаки нагрузочного и и задающего U, моментов coBna- j тый дают, на одном или на обоих входах элемента ИЛИ-НЕ 10 формируются сигналы логической 1, что соответствует отсутствию на его выходе управляющего сигнала и коммутатор 21 остается в нормально замкнутом состоянии - к входу коммутатора 22 подключен выход датчика 2 нагрузки, при этЪм осуществляется оттормаживание самотормозящегося необратимого редуктора 3. Оператор управляет исполнительным механизj oM 31 , но не ощущает действуюошх на (него усилий со стороным нагрузки 33. 47 Если при этом значение нагрузочного момента Uj превышает величину мо-. мента задания Ut , то знак момента U и разности (и,-и) не совпадет - на оба входа элемента ШШ 28 поступают сигналы логического U , что соответствует отсутствию управляющего сигнала на входе второго коммутатора 22, вход усилителя 5 отключается от источников управляющего сигнала. Оператор при этом перестает ощущать усилие нагрузки. Тем самым реализуется необратимая по усилию система уп- . равдения. Формула изобретения Устройство для управления копирующим манипулятором, содержащее последовательно соединенные первые усилитель, двигатель, редуктор, датчик нагрузки, датчик-положения и сумматор, последовательно подключенные вторые усилитель, двигатель и датчик нагрузки, связанный через исполнительный механизм с вторым датчиком положения, выход которого соединен с вторым входом первого сумматора, подключенного выходом к входу второго усилителя, отличающееся тем, что, с целью повьппения быстродействия, оно содержит последовательно соединенные первые пороговый элемент, блок выделения знака, элеменНЕ, элемент И и элемент ИЛИ, последовательно подключенные вторые пороговый элемент, блок вьщеления знака, элемент НЕ, элемент И и элемент ИЛИ, последовательно соединенные связанный с первым двигателем датчик скорости, третий пороговый элемент, элемент ИЛИ-НЕ, первый коммутатор и второй коммутатор, последовательно подключенные второй сумматор, четверпороговый элемент, третий блок выделения знака и третий элемент, а также третий элемент И четвертый элемент И, первый вход которого соединен с выходом третьего блока вьщеления знака, второй вход - с первым входом третьего элемента И и с выходом второго блока вьщеления знака, а выходс вторым входом второго элемента ИЛИ, подключенного выходом к второму входу второго коммутатора, выход которого соединен с входом первого усилителя, выход первого датчика нагрузки подключен к входу первого порогового эле51
мента, второму.входу первого коммутатора, и первому входу второго сумматора, соединенного вторым входом с входом второго порогового элемента и выходом второго датчика нагрузки, а выходомс третьим входом первого коммутатора выход второго элемента НЕ подключен к второму входу первого элемента И,
262447
выход третьего элемента НЕ соединен с вторым входом второго элемента И, рторой вход третьего элемента И подключен к выходу первого блока выделе5 ния знака, а выход - к второму входу
, первого элемента ИЛИ, выход которого соединен с вторым входом элемента ИЛИ-НЕ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор тока для активно-индуктивной нагрузки | 1988 |
|
SU1644108A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для защиты от буксования и юза колесных пар электровоза | 1987 |
|
SU1438976A1 |
| Система экстремального управления металлорежущими станками | 1979 |
|
SU926618A1 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Устройство для контроля фазочастотных характеристик каналов связи | 1985 |
|
SU1394440A1 |
| Устройство для перемещения электрода электротермической установки | 1982 |
|
SU1081815A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Система управления потребителями-регуляторами мощности | 1985 |
|
SU1332274A1 |
Изобретение относится к робототехнике и может быть использовано при создании копирующих манипуляторов. В изобретении за счет введения четырех элементов И, трех элементов НЕ, четырех пороговых злементов, трех блоков выделения знака, двух элементов ИЛИ, элемента ИЛИ-НЕ, двух коммутаторов и сумматора обеспечивается автоматическое переключение с обратимого по усилию режима на необратимый, чем повышается быстродействие устройства. 1 ил. §
| Самонаклад-раскрыватель тетрадный | 1977 |
|
SU633752A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ВСЕСОЮЗНАЯт:^птшггшйЧЕв||АвторыI ;высшее техническое училище им. Н. Э. Баумана | 0 |
|
SU389922A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
