(54) УСТРОЙСТЮ ДЛЯ УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ
1
Изобретение относится к автоматике, в частности к дистанционным манипуляторам, управляемым оператором, и может быть использовано в машиностроении при создании систем управления дистанционными манипуляторами..
По основному авт.св. № 582960, известно устройство, содержагцее последовательно соединенные электропривод, упругий элемент и датчик момента, датчик угла задающего органа , последовательно соединенные первые сумматор, усилитель, электрогидроусилитель, гидропривод и датчик давления, выход которого подключен ко входу первого.сумматора, а также последовательно соединенные датчик угла исполнительного органа и второй сумматор, выход котррого через последовательно соединенные Электропривод и датчик угла задающего органа подключен ко второму входу второго сумматора, второй выход ГРЩропривода соединен со входом датчика угла исполнительного органа, а выход датчика момента подключен ко второму входу первого сумматора Г1 .
Недостатком этого устройства являются низкие динамические характеристики, обусловленные угловым рассогМАНИПУЛЯТОРОМ
ласование 1 звеньев исполнительного и задаю1дего органов при их движении, что приводит к потере пнемоничности управления, т.е. к значительному несоответствию усилий, действующих на захват исполнительного органа и отраженных усилий на руке оператора как по величине, так и по направлению. Рассогласование обуславливается наличием угловой просадки упругого элемента, расположенного между звеном задающего органа и выходным валом электропривода при приложении к нему усилия. Кроме того,
15 рассогласование возникает из-за конечной добротности следящего электропривода, вследствие чего при движении звена задающего органа на выходе второго сумматора сигнал от ошибки слежения отличен от нуля.
Цель изобретения - повышение динамических характеристик устройства.
Поставленная цель достигается тем,что устройство содержит последовательно соединенные третий сумматор, интегратор, блок выделения модуля и блок умножения, через который выход второго сумматора подк.гпочен ко входу электропривода, причем первый
30 вход третьего сумматора соединен с
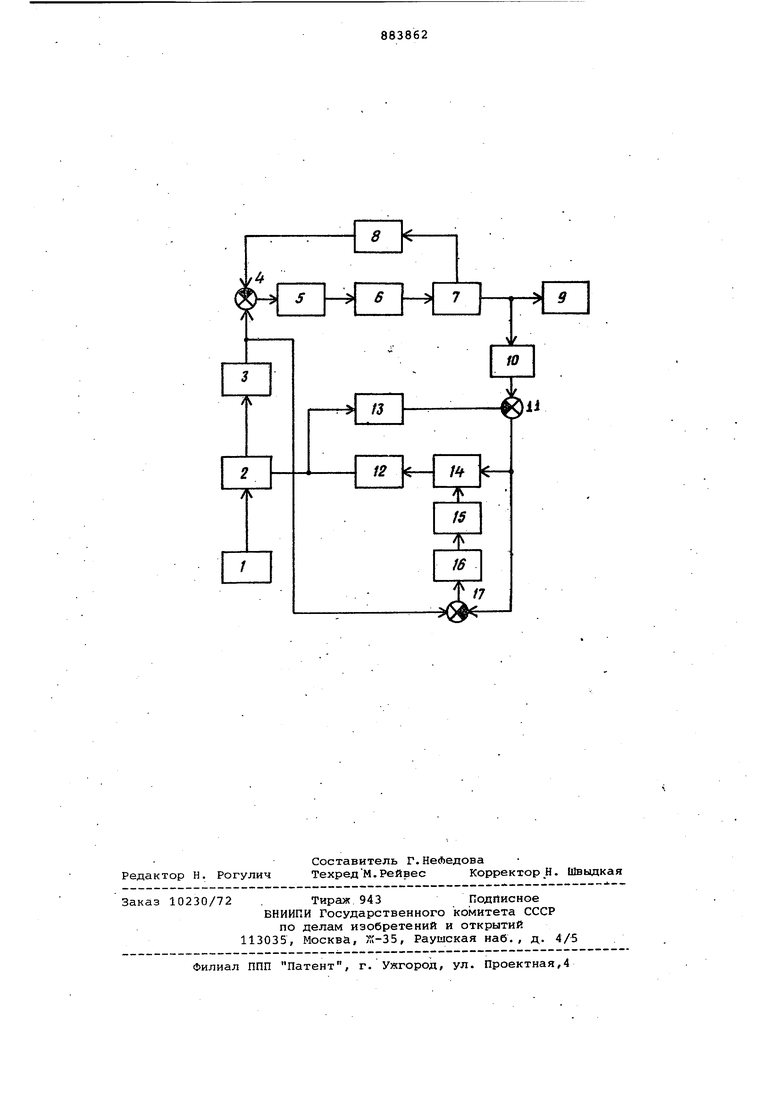
BfcixoflOM датчика момента, а второй вход - с выходом второго сумматора. На чертеже приведена блок-схема устройства для управления дистанционным манипулятором.
Устройство содержит звено 1 задающего органа, упругий элемент 2, датчик 3 момента, первый сумматор 4, усилитель 5, электрогидроусилитель б, гидропривод 7, датчик 8 давления , звено 9 исполнительного органа, датчик 10 угла исполнительного органа, второй сумматор 11, электропривод 12, датчик 13 угла задаю1дего органа, блок 14 умножения,блок 15 выделения модуля, интегратор 16 и третий cyMviaTop 17.
Устройство работает-следующим образом.
При силовом воздействии оператора на звено 1 задающего органа закручивается упругий элемент 2, угол закрутки которого замеряется датчиком 3 момента, т.е. вырабатывается сигнал , пропорциональный силовому воздествию оператора на звено 1 задающего органа. Этот сигнал поступает на второй вход первого cytviMaTOpa 4. На первый вход первого сумматора 4 постпает сигнал с датчика 8 давления,пропорциональный силовой нагрузке объекта манипулирования, на звено 9 исполнительного органа и непосредственно сиоединенного с ним гидропривод .7.
Разностный сигнал с первого сумглатора 4 подается через усилитель 5 и электрогидроусилитель б на гидропривод 7. Звено 9 исполнительного органа при этом перемещается со скорость пропорциональной разности с одной стороны силового взаимодействия оператора и звена1 задающего органа и с другой - силовой нагрузке объекта манипулирования на звено 9 исполнительного органа. Электропривод 12 осуществляет слежение звена 1 задающ го органа за звеном 9 исполнительного органа, по сигналу с выхода второго cy 1мaтopa 11, который сравнивает сигналы датчика 10 угла звена исполнительного органа и датчика 13 угла звена задающего органа. Разностный сигнал поступает на электропривод 12 через блок 14 умножения, коэффициент углножения которого отличен от нуля.
Угол закрутки упругого элемен та 2 совпадает по направлению с направлением желаемой угловой скорости перемещения звеньев 9 и 1 исполнительного и задающего органов при перемещении их от руки оператора, т.е. звено 1 задающего органа опережает выходной вал электропривода 12, угол поворота которого измеряется датчиком 13 угла задающего органа. По принципу действия следящих приводов выходной вал электропривода 12 отстает от выходного вала гидропривода 7 и непосредственно соединенного с ним звена 9 исполнительного органа угол поворота которых измеряется датчиком 10 угла исполнительного органа Таким образом, си1налы, поступающие на входы третьего сумматора 17, будут разного знака, а при равенстве их абсолютных значений угловое рассогласование между звеньями 9 и 1 исполнительного 4 и задающего 1 органов равно нулю. Последнее обеспечивается путем организации процесса слежения сигнала угловой ошибки с выхода второго сумматора 11 за сигналом с датчика 3 момента, т.е. сигналом угловой просадки упругого элемента 2. Это обеспечивается блоком 14 умножения, так как при изменении его коэффициента передачи по абсолютной величине по второму входу и зависимости от напряжения постоянного знака на первом входе с выхода блока 15 выделения модуля меняется добротность следящего провода и, как следствие, величина ошибки на выходе второго сумматора 11.
Изменение добротности происходит до тех пор пока выходное напряжение интегратора 16 не перестает изменяться, а это происходит только тогда, когда выходное напряжение с выхода третьего сумг 1атора 17 не станет равныл нулю, т.е. не станет равной нулю ошибка рассогласования между звеньями 1 и 9 задающего и исполнительного органов.
Применение предлагаемого изобретения позволяет улучшить динамические характеристики устройства.
Формула изобретения
Устройство для управления дистанционным манипулятором по авт.св. № 582960, отличающееся тем, что,- с целью улучшения динамических характеристик устройства,оно содержит последовательно соединенные третий сумматор, интегратор,блок вьщеления модуля и блок умножения, . через который выход второго сумматор подключен ко входу электропривода, причем первый вход третьего сумматор соединен с выходом датчика момЪнта, а второй вход - с выходом второго сумматора.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 582960, кл. В 25 J 11/00, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |