(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДИСТАНПИОННЫМ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU824130A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU448950A1 |
| Устройство для управления звеном очувствленного манипулятора | 1974 |
|
SU517483A1 |
| Устройство для управления очувствленным дистанционным копирующим манипулятором | 1978 |
|
SU783750A1 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
t
Изобретение относится к автоматике, а именно к очувствленным дистанционным копирующим манипуляторам , и может быть использовано для создания высокоточных универсальных манипуляторов.
Известен манипулятор, содержащий исполнительный привод, выходной вал которого связан через механические передачи и упругие элементы датчиков нагрузки с валом оператора и валом нагрузки, причем выходы датчиков соединены со входами сумматора, выход которого через усилитель подключен ко входу двигателя 1.
Недостатком этого манипулятора является его неудобство и недостаточная точность из-за неизменности установленного значения масштаба передачи нагрузки на вал оператора. Значение масщтаба обеспечивается соотношением масштаба передаточных чисел и изменение этого масштаба не предусмотрено конструкцией.
Известен также манипулятор, содержащий задающий и исполнительный органы с приводами и датчиками нагрузки, установленными в их суставах, причем выходы датчиков нагрузки соединены со входами соответствующих сумматоров, выходы которых связаны со входами соответствующих приводов задающего органа 2.
Недостатком этого манипулятора также является неудобство пользования и низкая точность из-за отсутствия возможности изменения масштаба отражения усилия. Это означает, что при работе с малыми и предельными нагрузками отношение между отраженным на руке оператора усилием и уси лием, развиваемым исполнительным органом при воздействии на него объекта манипулирования, сохраняется постоянным, что приводит к относительно большим ошибкам очувствления при работе с малыми нагрузками вследствие того, что доля возмущений в суммарном сигнале отражения от носительно увеличивается. При длительной работе с большими нагрузками очевидно неудобство такого манипулятора из-за невозможности согласования физиологических свойств оператора и технических характеристик машины.
Наиболее близким техническим решением к предлагаемому являемся устройство для управления диcтaнциoнным копирующим ма нипулятором, содержащее пульт управления, акселерометр исполнительного органа.
последовательно соединенные датчик положения задающего органа, привод исполнительного органа и датчик нагрузки исполнительного органа, блок уравновешивания и последовательно соединенные сумматор, привод задающего органа и датчик нагрузки задающего органа, выход которого связан с первым входом сумматор 3.
Недостатками этого устройства также являются его неудобство при работе с большими нагрузками и относительно низкая точность очувствления при работе с объектами, воздействующими на исполнительный орган усилиями или моментами, близкими к нижней границе диапазоне очувствления. Если манипулятор работает продолжительное время с нагрузками, близкими к максимальным, оператор вынужден преодолевать также длительное время максимально отраженные нагрузки, что повышает его утомляемость и снижает работоспособность т. е. такой манипулятор становится неудобным. Уровень возмущений в очувствленном манипуляторе почти не зависит от величины нагрузки и его можно считать постоянным. К таким возмущениям можно отнести неточности уравновешивания системы акселерометров, ошибки, вызванные сухим трением в суставах, и т. п. Если нагрузка невелика, то ее относительная доля в отраженном на руку оператора усилии хуже ощущается оператором, и точность очувствления падает.
Цель изобретения - увеличение точности устройства.
Эта цель достигается тем, что устройство содержит блок переключения коэффициента, первый вход которого соединен с выходом пульта управления, второй вход - с выходом датчика нагрузки исполнительного органа, а выход - со вторым входом сумматора.
Кроме того, оно содержит второй и третий блоки переключения коэффициента, первые входы которых подключены к выходу пульта управления, вторые входы - соответственно к выходам блока уравновешивания и акселерометра исполнительного органа, а выходы - к третьему и четвертому входам сумматора.
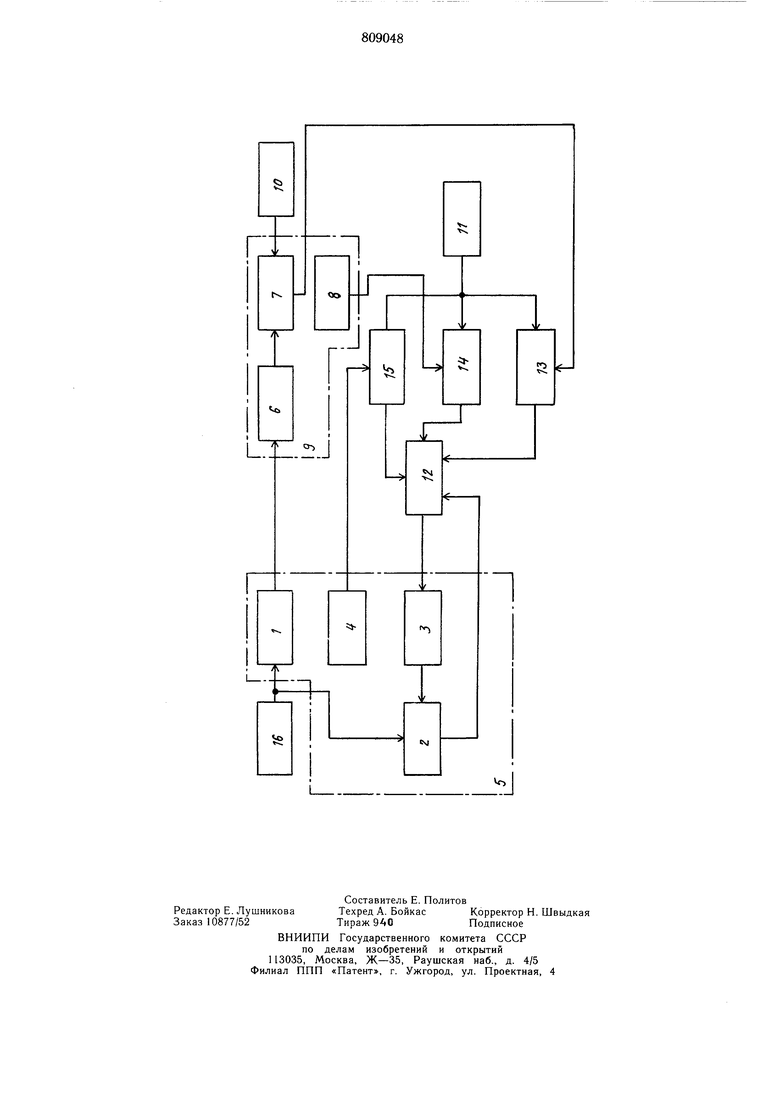
На чертеже изображена функциональная схема устройства для управления дистан ционным копируюшим м.анипулятором.
Устройство содержит датчик 1 положения задающего органа, датчик 2 нагрузки задающего органа, привод 3 задающего органа, блок 4 уравновешивания, установленные на задающем органе 5, привод 6 исполнительного органа, датчик 7 нагрузки исполнительного органа, акселерометр 8 исполнительного органа, установленные на исполнительном органе 9, объект 10 манипулирования, пульт 11 управления, сумматор 12, блоки 13-15 переключения коэффициента и оператора 16.
Устройство работает следующим образом Оператор 16 перемещает задающий орган 5, изменяя его положение в пространстве. Перемещение 30 преобразуется датчиком 1 положения задающего органа в сигнал управления. Привод исполнительного органа 6 отрабатывает заданное перемещение и исполнительный орган 9 взаимодействует с объектом 10 манипулирования. Усилия (моменты), возникающие от этого взаимодействия, измеряются датчиком 7
нагрузки исполнительного органа и сигнал нагрузки через блок 13 переключения коэффициента и сумматор 12 поступает на при вод 3 задающего органа, воздействующий через упругий элемент в датчике 2 нагрузки задающего органа на оператора 16 и вызывающий у него ощущения сопротивления, гтропорциональные прилаженной нагрузке со стороны исполнительного органа 9. Такое соответствие обеспечивается сравнением сигнала управления по нагрузке от блока
13 переключения коэффициента с сигналом обратной связи по нагрузке с датчика 2 нагрузки задающего органа в сумматоре 12. Исходя из опыта и оценки объекта 10 манипулирования, например, его массы, или из величины ощущаемого оператором усиЛИЯ, оператор 16 выбирает масштаб отражения усилия нагрузки и устанавливает выбранное значение на пульте 11 управления Если оператор ощущает незначительное отраженное усилие на 30, он переключает на
0 пульте 11 управления масштаб отражения, при этом по сигналу пульта 11 управления блок 13 переключения коэффициента изменяет коэффициент усиления на входе сумматора таким образом, что при том же сигнале от датчика 7 нагрузки исполнительного
5 органа привод 3 задающего органа развивает большее отраженное усилие на руке оператора 16. Если оператор ощущает чрезмерное увеличение нагрузки, действия с пуль том 11 управления производятся в обратном порядке. При этом оператор имеет воз° можность выбирать для себя оптимальный масщтаб отражения нагрузки, исходя из ожидаемой длительности работы и величины нагрузки.
Таким образом, манипулятор становится
5 удобным для работы оператора в составе биотехнической системы человек-машина.
В манипуляторах, оснащенных акселерометрической системой уравновешивания, необходимо одновременно производить переключение коэффициента по каналам уравновешивания, что также увеличивает точность очувствления. Сигнал акселерометра исполнительного органа 8 алгебраически суммируется в сумматоре 12 с сигналом датчика 7 нагрузки исполнительного органа. Одновременность изменения коэффициентов в блоках 13 и 14 переключения коэффициента обеспечивает равенство по модулю сигнала акселерометра исполнительного органа 8 и весовой составляющей сигнала датчика 7 нагрузки исполнительного органа на входах сумматора 12. Заметим, что акселерометры в этом случае играют роль измерителей составляющей ускорения свободного падения, создающей весовую нагрузку на исполнительный орган. Ту же задачу выполняет блок 15 переключения коэффициентов, если уравновещивание исполнительного органа 9 производится полностью или частично компенсационным методом с помощью блока 4 уравновешивания, установленного на задающем органе 5. Функция блока уравновещивания, имеющего в своем составе акселерометры и вычислитель, состоит в выработке компенсирующего сигнала с такой же функциональной зависимостью от положения 30, как весовая нагрузка собственно конструкции исполнительного органа от его положения. Таким образом, оператор манипулятора выбирает по своему усмотрению наиболее удобный диапазон работы системы очувст вления, обеспечивающий относительное снижение уровня помех и повышение точности манипулятора с одной стороны, и повышение удобства работы, снижение утомляемости оператора - с другой. Формула изобретения 1. Устройство для управления дистанционным копирующим манипулятором, содержащее пульт управления, акселерометр исполнительного органа, последовательно соединенные датчик положения задающего органа, привод исполнительного органа и датчик нагрузки исполнительного органа, блок уравновещивания и последовательно соединенные сумматор, привод задающего органа и датчик нагрузки задающего органа, выход которого связан с первым входом сумматора, отличающееся тем, что, с целью увеличения точности устройства, оно содержит блок переключения коэффициента, первый вход которого соединен с выходом пульта упрарления, второй вход - с выходом датчика нагрузки исполнительного органа а выход - со вторым входом сумматора 2. Устройство по п. 1, отлычаюы ееся тем, что оно содержит второй и третий блоки переключения коэффициента, первые входы которых подключены к выходу пульта управления, вторые входы - соответственно к выходам блока уравновешивания и акселерометра исполнительного органа, а выходы - к третьему и четвертому входам сумматора. Источники информации, принятые во внимание при экспертизе 1.Кубарев Е. И., Кулещов В. С., Пакин А. А. Системы моментной разгрузки и моментного масщтабирования в копирующих манипуляторах. Сборник «Теория и устройство манипуляторов, М., «Наука, 1973, с. 72, рис. 1. 2.Кулешов В. С., Лакота Н. А. Динамика систем управления манипуляторами М., «Энергия 1971, с. 244 рис 514 3. Авторское свидетельство СССР № 275680,кл. В 25 J 3/04, 31.03. 69 (прототип).
Л
v
.±j
L.
