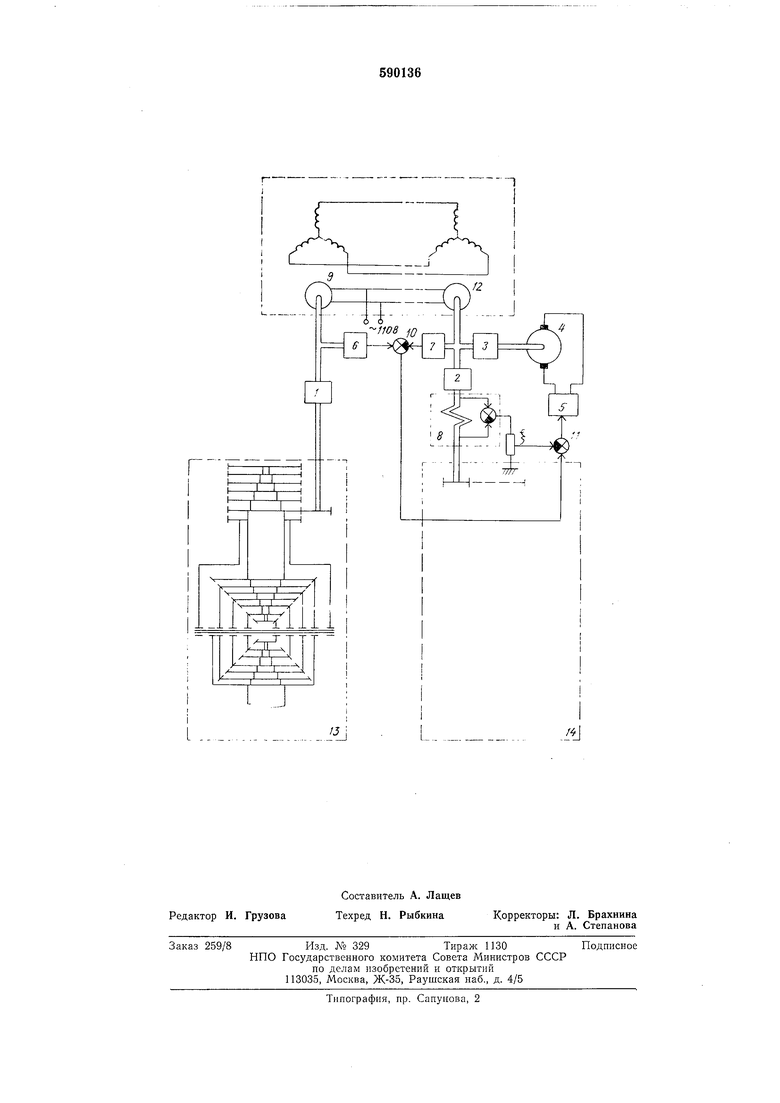
щие сийхрониеирующие , пропорциональные углам рассогласования роторов силовых сельсинов, которые через редукторы 2 прикладываются к соответствующим зубчатым колесам исполнительного органа 14 манипулятора. Одновременно с этим появляется сигнал управления -на выходе сумматора 10, образованный сравнением сигналов датчиков 6 и 7 по,лол ;ения.
Этот сигнал управления после усиления усилителем 5 воздействует на якорь исполнительного двигателя 4, заставляя последний помогать осуществлять двинссние оператору. При появлении момента нагрузки на исполнительном органе 14 манипулятора на входных зубчатых колесах исполнительного органа имеют место соотв етствующи1е моменты, которые вызывают появление сигнала датчика 8, направленного npiOTHB сигнала управления сумматора 10.
Таким образом, в любой момент времени момент нагрузки на каждой степени свободы манипулятора уравновешивается суммой моментов оператора, переданного через сельсины 9, 12 и двигателя 4, управляемого усиленным сигналом разности датчиков моментов..
Применение изобретения позволит значительно (в 10-20 раз) повысить грузоподъемность манипуляторов серии МЭМ.
Формула йзобретедия
Дистанционный копирующий манипулятор, содержащий для каждого сустава последователвно соединенные ред уктор задающего органа, сельсин-датчик, сельсин-приемник, редуктор исполнительного органа и датчик момента исполнительного органа, отличающийся тем, что, с целью повыщения грузоподъемности манипулятора, он содержит для каждого сустава первый датчик положения и последовательно соединенные второй датчик положения, первый сумматор, второй сум матор, усилитель, двигатель и согласующий редуктор, выход которого соединен с входами редуктора испюлнительного органа и второго датчика положения, выход датчика момента исполнительного органа подключен к второму входу второго суММатора, вход первого
датчика положения соединен с выходом редуктора задающего орга«а, а выход - с вторым входом первого сумматора.
Источники информации, принятые во внимание при экспертизе
1. Каталог-справочник «Манипуляторы. Л., 1968, с. 90.
2. Каталог-справочник «Манипуляторы. Л., 1968, с. 93.
| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимая следящая система управления манипулятором | 1978 |
|
SU748342A1 |
| Обратимая следящая система | 1980 |
|
SU903800A1 |
| Система управления дистанционным манипулятором | 1975 |
|
SU582090A1 |
| Устройство для управления манипулятором | 1980 |
|
SU885968A1 |
| Привод для сустава задающего органа копирующего манипулятора | 1974 |
|
SU511201A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Система управления копирующим манипулятором | 1977 |
|
SU614939A1 |
| Привод манипулятора | 1972 |
|
SU436733A1 |
| Система управления копирующим манипулятором | 1978 |
|
SU697966A1 |