Изобретение относится к системам дистанционного управления многомаши ными агрегатами, преимущественно су довыми, состоящими из нескольких двигателей, кинематически соединенных с общим валом. Известны системы дистанционного управления судовыми и транспортными двигателями l . Наиболее близким по технической сущности к предлагаемому изобретению является устройство для дистанционного управления двигателем внут реннего сгорания 2 , содержащее датчики частоты вращения двигателей многомашинного агрегата, соединенные через регулирующий орган с валом отбора мощности, на котором размещен 1 кулачки с соответствующими концевыми выключателями/ соединенными с выходами логического блок задатчик частоты вращения, выход ко торого подключен ко входам двух суммирующих элементов, выходы kotoрых через функциональный преобразователь соединены со входом сервомеханизма, выходные каналы которого подключены ко входам регулирующего органа. Недостатком известного устройства является сложность дистанционного поста управления, который включает в себя раздельные задатчики для каждого двига±еля, взаимодействующие каждый со своим датчиком частоты вращения дв1игателя, переключатель задатчиков в зависимости эт того/какой двигатель подключен к валу отбора мощности (может быть подключен любой один двигатель или все сразу), большие габариты такого поста, на котором кроме задатчиков размещаются .также все измерители частоты вращения двигателей агрегата, сложность получения достаточной точности системы. Целью изобретения является повышение точности работы при управлении агрегатом. Поставленная цель достигается тем, что устройствосодержит первый и второй элементы ИЛИ, масштабный элемент и первый и второй элементы И, один вход первого элемента И соединен с выходом Частоты вращения одного двйгателя,ДРУГОЙ вход - с одним выходом логического блока, два поугих выхода которого соединены со
вхбд мипервого .элемента ИЛИ, выход itoToporO подключен к Одному бходу второго элемента И, другим входом соединенного через масштабный элемент с выходом датчика частоты вращения другого двигателя, а выходом с одним входом второго элемента ИЛИ, другой ВХОД которого сЪеДиНён с выходом первого элемента И, а выход С/соответствующими входами суммирующих элементов.
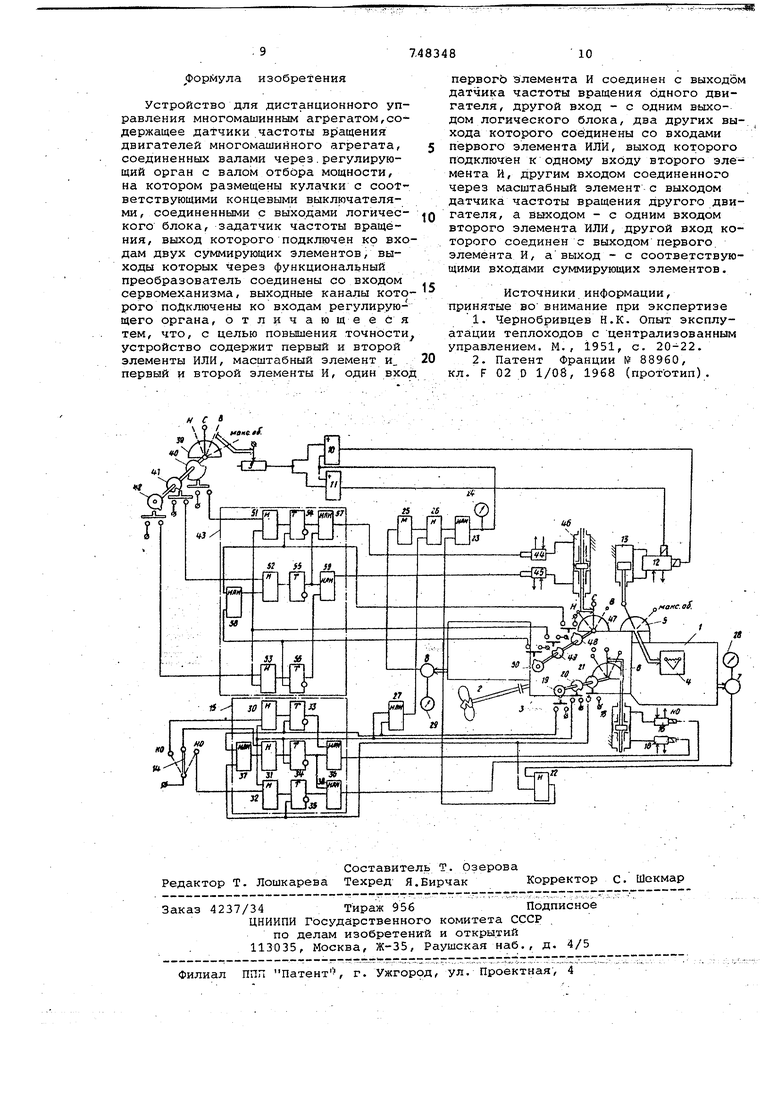
На чертеже изображена функциональная схема устройства. Двигатели носового 1 и кормового 2 отсеков, входящие в многомашинный агрегат, соединены между собой редукторной передачей 3, выходной фланец которой соединен с общим валом отбора мощности.
На редукторной передаче 3 размещены главный регулирующий орган4 агрегата в целом, кинематически связанный с местным постом 5 управления частотой вращения агрегата. Регулирующий орган 4 связан зубчатой рейкой с топливорегулирующей аппаратурой двигателей всех отсеков, когда они подключены к главной редукторной передаче, -а также имеет гГривод от главной редукторной передачи. .
При работе любого двигателя, отключенного от главной редукторной перёдачи, его .частота вращения придерживается вспомогательным (отсечным) |Уё1гуля Ором,, кинематйЧескй связанным с топляворегулйрующёй аппаратурой данного двигателя и имеющим привод от коленвала этого двигателя.
При этом топливорегулируюЩая аппаратура каждого двиГателя, отключенного от главной редукторной передачи, от главного регулирующего органа 4
отключена. .- ; . - -
На главной редукторной передаче расположен местный пост б управления, подключающий двигатели 1 и 2 к общему валу через передачу .3.
К двигателям 1 и . 2 подключеМь соответственно датчики 7 и 8 частоты вращения двигателей. Датчик 7 принят за эталонный. ;
Задатчик 9 прИ помощи суммиру ющих элеме нтов 10 и 11 подключен к обмоткам меньше и больше функционального преобразователя 12.
Преобразователь Г2п6Й1 Ш Ш :й: источнику силовой рабочей среды (на чертеже не показан) подводящим и отводящим каналами, а выходными канала|ли - к сервомеханизму 13, кинематически связанному через рычаг местного поста управления 5 с регулирующим органом 4.
Командный орган 14 дистанционного управления подключением отдельных двйг атёлёй к агрёгату, имеющий три .положения - НО - отключениеносового двигателя, 5 подключение обоих двигателей к валу и КО - отключение кормового двигателя от вала, - при
:помощи логического блока 15 и преобраэователей 16 и 17 подключен к приводу 18, кинематически связанному с рукояткой поста б и кулачками, взаимодействующими с Концевыми выключателями сигнализации фиксированных положений рукоятки поста б, при помощи которых к логическому блоку 15 подключен источник питания (на чертеже показан клеммой).
Концевой выключатель кулачка 21 и датчик 7 подключены через.логические элементы И 22 и ИЛИ 23 ко входам суммирующих элементов 10 и 11 и к измерителю 24 частоты вращения всего агрегата,- размещенному в районе дистанционного поста управления.
К другому входу логического элемента. ИЛИ 23 При помощи маС.йтабного элемента 25 и логического элемента И 26 подключен датчик 8, к другому входу И 26 при помощи ИЛИ 27 подключен источник питания через кулачки 19 и 20. К датчикам 7 и 8 подключены соответственно измерители 28 и 29 частоты вращения двигателей, размещенные вблизи местных постов управления. . Логический блок 15 содержит три пары логических элементов, соответствующих каждому положению органа 14. Каждая пара состоит из логического, элемента И (30, 31, 32)- и элементов памяти (33,34,35). .
Ко входу элемента И 30 подключен командный орган 14 в положении КО (отключение кормового отсека) и источник питания через концевой выключатель Z (оба двигателя подключены). Выход элемента 33 памяти через элемент ИЛИ 36 подключен к обмотке преобразователя 17 (отключение кормового отсека), а вход сброса элемента 33 подключен К источнику питания через кулачок 19 (кормовой отсеке Отключен) .
Ко входу элемента И 31 подключен командный орган 14 в положении 1 (подключение обоих двигателей к передаче) и через элемент ИЛИ 37 к концевым выключателям кулачков 19 и 21. Выход И 31 Через элемент 34 памяти подключёнчерез элементы ИЛИ 36 и 38 к преобразователям 17 и.16 сОотвё тственно. .Вход сброса элемента 34 памяти подключен к концевому выключателю кулачка 21.
Ко входу элемента И 32 подключен командный орган 14 в положении НО (отключение носового двигателя от передачи) и концевой выключатель (оба двигателя подключены к передаче) . Выход элемента И 32 .через, элемент 35 памяти и ИЛИ 38 подключен к г1реобра;зователю 16.Вход сброса, элемента 35 памяти подключен к концевому выключателю кулачка 21,
Для управления переключением редукторной передачи при изменении направления вращения вала отбора мощности дистанционный пост 39 оборудован кулачками 40, 41 и 42, кинематически связанными с рукояткой поста 39 и взаимодействующими с соответствующими концевыми вьаключателями. Кон- 5 цевые выключатели при помощи логического блока 43 управления переключением передачи 3 агрегата подключены к преобразователям 44 (вперед) и 45 (назад), связанным напорной и JQ сливной магистралями с источником силового питания (на чертеже не показан) , а выходным каналом - с ме ханйзмом 46 управления переключени. ем передачи, кинематически связанным ,с с местным постом 47 управления.
Механ-изм 46 снабжен кулачками 48, 49 и 50, взаимодействующими с соответствующими концевыми выключателями, подключенными к логическому блоку 43.20
Логический блок 43 содержит три пары логических элементов соответствующих каждому положению рукоятки поста 39 при управлении переключением передачи (замыкание концевых выключателей кулачков 40 ,41,42).Каждая; пара состоит из логического элемента И (51,52,53) и элемента памяти (54, 55, 56),.
Ко входу элемента И 51 подключен 30 источник питания через концевой выKJtючaтeль кулачка 40 и через концевой выключатель кулачка 41 (агрегат отключен от вала). Выход элемента 54 памяти через элемент ИЛИ 57 под- 35 ключен к обмотке преобразователя 44. Вход сброса элемента 54 подключен к источнику питания через концевой выключатель кулачка 48 (агрегат подключен к валу в положении впе- 0 ред).
Ко входу элемента И 52 подключен ИСТОЧНИК питания через концевой выключатель кулачка 41 (отключение агрегата от вала) И через элемент ИЛИ 5 58 и концевые выключатели кулачков 48 (агрегат подключен к валу в положении вперед) и 50 (агрегат подключен к валу в положении .назад) . Выход элемента 52 памяти через эле- ... менты ИЛИ 57 и 59 подключен к обмотке преобразователей 44 и 45 одновременно. Вход сброса элемента 52 подключен к источнику питания через концевой выключатель кулачка 49.
Ко входу элемента И 53 подключен 55 источник питания через концевой выключатель кулачка 42 (подключение агрегата к валу в положении назад) и через концевой выключатель кулачка 49. Выход элемента 56 памяти че- 60 рез элемент ИЛИ 59 подключен к обмотке преобразователя 45. Вход сброса элемента 56 подключен к источнику .питания через концевой выключатель кулачка 50.65
748348
Сервомеханизм 13. управления изменением частоты вращения агрегата представляет собой поршневой гидроцилиндр двустороннего действия, поршень которого кинематически связан с рычагомместного поста управления 5.
Привод 18 управления подключением и отключением двигателей к главной передаче представляет собой поршневой гидроцилиндр, в котором между основным поршнем и корпусом размещенй плавающие втулки, взаимодействующие с выступами поршня и корпуса.
Механизм 46 управления переключением редукторной передачи конструктивно выполнен аналогично приводу 18
Устройство работает следующим образом.
При управлении переключением редукторной передачи перемещают рукоятку дистанционного поста 39, устанавливая ее в фиксированные положения В , С , Н, соответствующие включенному положению концевых выключателей кулачков 40, 41 и 42.
При установке рукоятки из положения С в положение В или Н кулачком 40(42) замыкается соответствующий выключатель, подающий сигнал от источника питания в блок 43 к элементу И 51(53), к другому входу которого также подключен источник питания от концевого выключателя кулачка 49. С выхода элемента И 51(53) сигна поступает на вход элемента 54(56) памяти и запоминается для последующей отработки (для предотвращения сбоев при случайном перемещении рукоятки поста 39 из фиксированного положения) . С выхода элемента 54(56) сигнал через элемент ИЛИ 57(59) поступает на обмотку преобразователя 44 (45), который подает силовое питание в соответствующую полость механизMai 46. Поршень механизма 46 перемещается в крайнее положение, перемещая вместе с собой плавающую втулку (другая втулка упирается в выступ корпуса механизма и остается на месте) . Одновременно переключается рукоятка местного поста 47 в положение Ш (Н), и замыкается выключатель кулачка 48(50) , с помощью которого подключается источник питания ко входу сброса элемента 54(56), снимая сигнал с выхода элемента. Обмотка преобразователя 44(45) обесточивается, при этом полосги механизма 46 соединяются.со сливом, а напорная магистраль от источника силового питания отключается от механизма.
При установке руко.ятки песта 39 и положения Н или Б в положение С кулачок 41 замыкает свой выключатель подающий сигн.ал от источника питания в блок 43 к элементу И 52, к дру.гому входу которого также подключен
источник питания от концевого выключателя кулачка 50(48) через элемент ИЛИ 58. С выхода элемента И 52 сигнал поступает на БХОД элемента 55 памяти и запоминается.
С выхода элемента 55 сигнал через элементы ИЛИ 57 и 59 поступает одновременно на обмотки преобразователей 44 и 45. Преобразователи подают силовое „питание в обе полости механизма 46. Поршень механизма 46 устанавливается в среднее положение за счет плаёающих втулок, одновременно упирающихся с двух сторон в выступы поршня и корпуса механизма. Одновремен-но переключается рукоятка Местного поста 47 в положение С и замыкается выключатель кулачка 49, подключая ко входу сброса элемента 54 источник питания. Это снижает сигнал с выхода элемента 55, обмотки преобразователей 44 и 45 обесточиваются. Полости механизма 46 соединяются со сливом.
При управлении частотой вращения агрегата при перемещении рукоятки поста 39 из положения В в сторону увеличения частоты вращения агрегата (вплоть до положения макс.об) рукоятка кинематически воздействует на задатчик (потенциометр) 9. При этом на входах суммирующих элементов. 10 и 11 возникает, разность величины сигнала от задатчика 9 и датчиков частоты вращения агрегата (7 или 8) (в.зависимости от того, в каком -составе двигателей работает агрегат) В зависимости от полярности разности сигналов с выхода элемента 10 или 11 поступает сигнал на. обМотку
(больше - при увеличении частоты вращения или .меньше - при уменьшении частоты вращения в пределах
зоны перемещения рукоятки поста 39 из положения В в положение макс, об. и обратно) преобразователя 12.
-Преобразователь 12 подает силовую среду от источника в соответствующую полЬсть сервомеханизма 13, пр1И этом другая полость сервомеханизма через преобразователь 12 соединена со сливом. Шток сервомеханизма перемещает главный регулируквдий орган 4 агрегата, при этом регулирующий орган изменяет подачу топлива в двигатели, подключенные к передаче агpelaTa. Изменяется частота вращения агрегата, пока сигнал от датчика 7() на входах элементов 10 и 11 не сравнивается с сигналом от задатчика 9. При Этом сигнал с выхода элементов 10(11) снимается, обмотки
преобразователя 12 обесточиваются. Полости сервомеханизма 13 отключаются от напорной и сливной магистралей источника силового питания и .запираются .в установленном положении
. закрытыми полостями преобразователя
12, который фиксирует положение сервомеханизма 13, не давая ему перемещаться под воздействием пружины регулятора.
При упр авлении подключением и отключением двигателей-отсеков от пё редачи командный орган 14 устанавливается в однЬ из положений НО, 1 или КО.
0 При установке командного органа 14 в положение НО или КО из положения TI сигнал поступает к элементу И 32(30), к другому входу которого подключен источник питания через
с концевой выключатель кулачка 20. С выхода элемента И 32(30) сигнал поступает на вход элемента 35(33) памяти, выход которого через элемент. ИЛИ 38(36) подключен к обмотке .преобразователя 16(17). Преобразователь
16(17) подает силовое питание в соответствующую полость привода 18. Поршень привода 18 перемещается в крайнее положение, переключая рукоятку местного поста 6 в положение НО
5 (ко), одновременно замыкая концевой Выключатель кулачка 21(19) и подключая источник питания ко входу сброса элемента 35(33). Обмотка преобразователя 16(17) обесточивается,при
0 этом полости привода 18 соединяются со сливом.
При установке командного органа 14 в положение Z из положения НО или КО сигна,л поступает к элементу
5 И 31, к дрзгому ходу которого подключен источник питания чер.ез элемент ИЛИ 37 и концевые выключатели кулачков 19 и 21. С выхода элемента И 31 сигнал через элементы ИЛИ 36
0 и 38 поступает, на обмотки преобразователей. Преобразователи подают силовое питание в обе полости привода 18. Поршень привода 18 устанавливается в среднее положение, переклюг чая рукоятку местногопоста 6 в положение 5. , одновременно замыкая кон. цевЪй выключатель куЛачка 20, в результате чего источник питания подключается ко входу сброса элемента 34, снимая си.гнал с его выхода. 06мотки преобразователей 16 и 17 обесточиваются , при этом полости привода 18 соединяются со сливом.
При подключенных к агрегату обоих двигателях или подключенном двигателе 2 сигнал на входы суммирующих элём.ентов 10 и 11 поступает от датчика 8 через масштабный элемент 25, элементы И 26 и ИЛИ 23,
При подключении к агрегату только двигателя 1 (двигатель 2 отключ-ен) сигнал на входы элементов 10 и 11 поступает от датчика 7 через элементы
5 и 22 и ИЛИ 23.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1975 |
|
SU699218A1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU883539A2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1980 |
|
SU960457A2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕЙ | 2003 |
|
RU2262609C2 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Система дистанционного управления двигателем внутреннего сгорания | 1980 |
|
SU866255A1 |
| Силовая установка | 1979 |
|
SU802573A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU878993A2 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1979 |
|
SU855238A2 |
