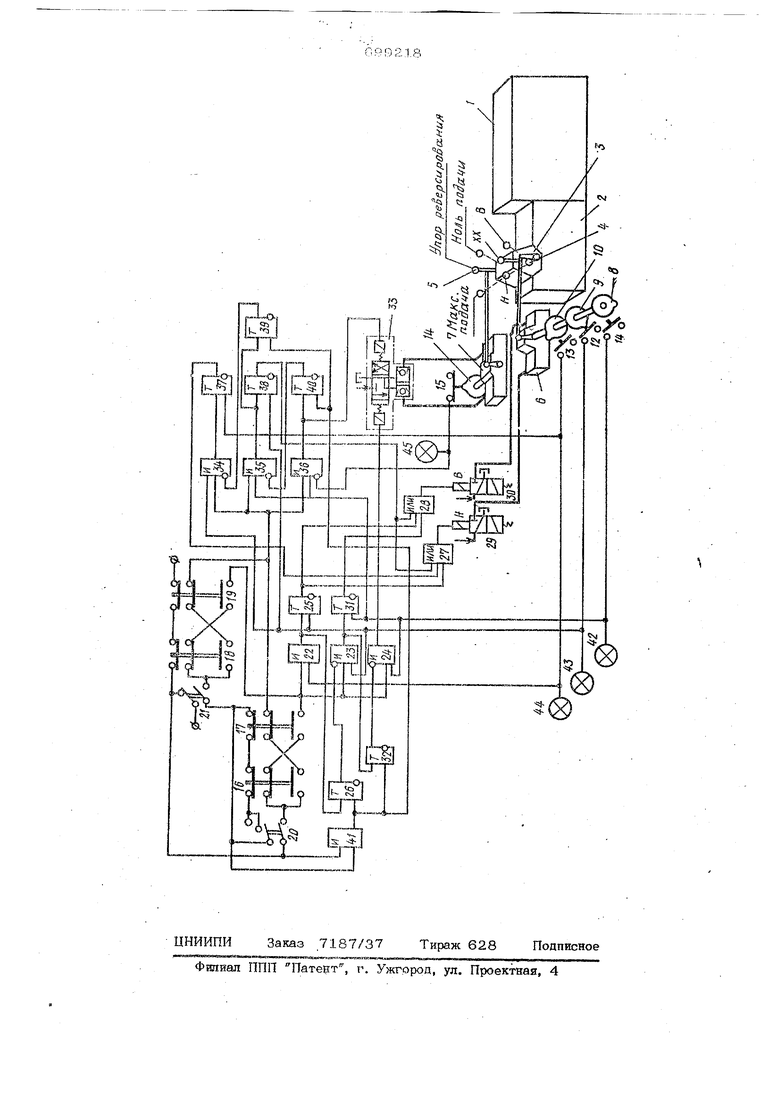
.Изобретение относится к обпасти машиностроения, преимущественно к двигателям внутреннего сгорания, в частности, к системам 0х управления. Иввестны системы дистанционного управления двигателем внутреннего сгорания с реверс-редукторной передачей, содержащие местный пост с рукоятками раздельного управления реверс-редукторной передачей и частотой вращения двигателя и к Ж1андные органы дистанционного поста управления, лодключенные при помощи преобразователей к сервомеханизмам, кинематически связанным с руко ятками местного поста и снабженным кон цевыми выключателями фиксированных по ложений сервомеханизмов l . При управлении установкой из двух и более двигателей известная система бует повышенного внимания при управлеБгии, особенно при переключении реверс- редукторной передачи, в результате чего возможны ошибки оператора. Управление с нескольких дистанционных постов при помощи известной системы осуществить весьма сложно. Целью настоящего изобретения является исключение недостатков известной системы, облегчение работы оператора и исключение его ошибочных действий при управлении. Поставленная цель достигается тем, что командные органы с преобразователями при помощи пар из последовательно соединенных логического элемента И и запоминающего устройства, число которых равно числу режимов переключения передачи и входы которых соединены с концевыми выключателями фиксированных положений сервомеханизмов. Система также может быть снабжена дополнительными запоминающими устройствами, имеющими входы сброса, подключенные к каждому командному органу, и связывающими входы и выходы элементов И попарно. На, чертеже изображена принципиальная схема системы. На двигателе 1 с реверс -ред кторной передачей 2 установлен местньй пост 3 с рукоятками раздельного управления 4 реверс-редукторной передачей (имеет фиксированные положения Н - назад, XX - передача отключена и В - вперед) и 5 - частотой вращения двигателя (имеет фиксированные положения ноль, подачи, упор реверсирования и максимальная -подача). Рукоятка 4 управления передачей кинематически связана с сервомеханизмом 6, а рукоятка 5 управления частотой вращения ™ ,с сервомеханизмом 7. Сервомеханизм б снабжен кулачками 8,9 и 10 и взаимодействуюяш ми соответственно с ними концевыми вык лючателями ll, 12 и 13 его фиксирован ных положений В , XX и Н, Сервомеха ниэм 7 снабжен кулачком 14 и взаимодействующим с ним концевым вы1шючате- лем 15 его фиксированного .положения упор реверсирования. Система содержит командные органы 16, и 19 дистан ционных постов управления и переключатели 20 и 21 также расположенные на дистанционных постах управления и предназначенные для снятия, питания с команд ных органов 16, 17 и 18, 19-соответственно при передаче управления с одного поста На другой. Нормально открытый (но) контакт, командного органа 17 подключает питание через нормально закрытые (НЗ) контакты командных органов 16, 18, 19 и переключатель 20 ко аходам логических элементо.в И 22, 23 и 2 Логический элемент И 22- составляет па™ ру с последовательно соединенным с ним запоминающим устройством 25. Кроме то го, логический элемент И 22 связан при помоци дополнительного запоминающего устройства 2й с логическим элементом И 23, Выход запоминающего устройства 25 при помоци элементов ИЛИ 27 и 28 под ключей к преобразователям 29 и 30, свя занным силовыми каналами с сервомеха. нивмом 6. Логический элемент И 23 составляет пару с последовательно соединенным с ним аапоминаюшйл устройством 31. Кроме того, элемент И 23 связан при помощи дополните тьного запоминающего устройства 32: с логическим элемен том И 24. Выход логического элемента И 24 подключен к обхютке Б (больше) преобразователя 33, связанного силовыми каналами с сервомеханизмом 7. НО контакт командного органа 16 получает пит1эние черев НЗ контшсты команд пых органов 17, 18 и 19 и переключатель 20 ко входам логических элементов И 34, 35, 36. Логический элемент И 34 составляет пару с последовательно соединенным с ним запоминающим устройством 37. Логический элемент И 35 составляет пару с последовательно соединенным с ним запоминающим устройством 38. Кроме того, элемент И 35 связан при помощи дополнительного запоминающего устро.йства 38 с логическим элементом 34. Логический элемент И 36 связан при помощи дополнительного запоминающего устройства 40 с логическим элементом 35. Выход запоминб. .ощего устройства 37 подключен :при помощи логического элемента ИЛИ 27 к преобразователю 29 Н. Выход запоминающего устройства 38 подключен при помощи элемента ИЛИ 27 и 28 к преобразователям 29 и 30, а Выход элемента И 36 - к обмотке М (меньше) преобразователя 33. Входы сброса, которыми снабжены дополнительные запоминающие устройства 26, Зй, 39 и 40, подключены через НЗ контакты каждого командного органа к источнику питания при i помощи логичеСК9ГО элемента И 41. Входы сброса запоминающих устройств 25, 31 и 37, 38 под1слюченык концевым выключателям 11, 12, 13.Кконцевым выключателям 11, 1.2,, 13 и 15 подключены также лампы сигнализации 42, 43, 44, 45 фиксированных положений сервомеханизмов. Система работает следующим образом. Например, двигатель 1 находится в исходном положении, когда на местном посту рукоятка 5 управления частотой вращения находится в положении упор реверсирования1 а рукоятка 4 управления передачей - в положении XX. При нажатии на дистанционном посту командного органа 17 (больще) замыкается его НО контакт,, и через элемент И 23 и запоминающее устройство 31 сигнал поступает через элемент ИЛИ 28 на преобразователь 30 В, подающий силовое питание в полость сервомеханизма 6 Сервомеханизм 6 перемещает ру1соятку 4 управления переключением передачи 2 на местном посту 3 в. положение В и одновременно кулачком 8 зажимает концевой выключатель 11, подающий сигнал на вход сброса устройства 31. На время нажатия органа 17 устройство 3,2 блокирует элемент И 24 от выключения последующей комяэды. Гаснет лампа 43 и зажигается лампа 42.
При отпускании и повторном нажатии органа 17 через элемент И 24 поступает сигнал на обмотку Б преобразователя 33, подающего силовое питание на сервомеханизм. Сервомеханизм 7 перемещает рукоятку 5 управления частотой вращения на местном посту 3, пока нажат командный орган 17. При отпускаНИИ органа 17 преобразователь 33 фикси рует сервомеханизм 7 в установленном положении при помощи встроенного в пре образователь гидроаамка. При нажатии командного органа 16 (меньше) замыкается его НО контакт, и через элемент И 36 сигнал поступает на обмотку М преобразователя 33, подаfomero силовое питание на сервомеханизм 7, Сервомеханизм 7 перемещает рукоятку управления частотой вращения, пока нажат орган 16 или пока сервомеханизм 7 не придет в положение упор реверсирования, В этом случае замыкается кон цевой выключатель 15, загорается лампа 45, На время нажатия органа 16 устройство 40 блокирует элемент И- 35 от выполнения последующей команды. При отпускании и повторном нажатии органа 16 через элемент И 35 и запоминающее устройство 38 сигнал поступает через элемент ИЛИ 27 и 28 на преобразователи 29 и 30, подающие питание в обе полости сервомеханизма 6. Сервомеханизм 6 перемещает рукоятку 4 управления переключением передачи в положение XX- и одновременно кулачком 9 .замыкает выключатель 12, подающий сигнет на вход сброса устройства 38. Гаснет лампа 42, загорается лампа 43. На время нажатия органа 16 устройство блокирует элемент И 34 от выполнения ,последующей команды. При отпускании и поворотном нажатии органа 16 через элемент И 34 и запоми нающее устройство 37 сигнал поступает через элемент ИЛИ 27 на преобразователь 29 Н, подающий силовое питание в полость сервомехани зма 6. Сервомеханиз 6 перемещает рукоятку 4 управления передачей в положение М и одновременно кулачком 10 замыкает выключатель 13, подбцбщий сигнал на вход сброса устройства 37, Гаснет лампа 43, загорается лампа 44,
При одновременном нажатии двух командных органов на любом дистанционном посту управления они взаимно блокируются и команды не проходят.
Таким обравом, обеспечивается облегчение работы оператора при управлении многодвигательной установкой с несколь- ких дистанционных постов управления и исключаются ощибки оператора при управлении. Формула изобретения 1.Система дистанционного управления двигателем с реверс-редукторной передачей, содержащая местный пост с рукоятками .раздельного управления реверс-редукторной передачей и частотой вращения двигателя и командные органы, дистанционного поста управления, подключенные. при помощи преобразователей к сервомеханизмам, кинематически связанным с рукоятками местного поста и снабженным KOHneBbiNW выключателями фиксированных положений сервомеханизмов, отличающаяся тем, что, с целью облегчения работы оператора и исключения его ощибочных действий при управлении, командные органы связаны с преобразователями при помощи пар из последовате/ ьно соединенных логического элемента И и запоминающего устройства, число которых равно числу режимов переключения передачи и входы которых соединены с концевыми выключателями фиксирсжанных положений сервомеханизмов, 2.Система поп, 1, отличающая с я тем, что она снабжена дополнительными запоминающими устройствами, имеющими входы сброса, подключенные к каждому командному органу, и связывающими входы и выходы элементов И попарно. Источники информации, принятые во внимание при экспертизе г ;1. Минеев Ю, И. и др. Гидравлические системы и приводы судов на подводных крыльях. Л., Судостроение, 1972, 123129.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU883539A2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU878993A2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1978 |
|
SU740969A1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1980 |
|
SU960457A2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕЙ | 2003 |
|
RU2262609C2 |
| Устройство для дистанционного управления многомашинным агрегатом | 1978 |
|
SU748348A1 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Дистанционный привод управления главным судовым двигателем /варианты/ | 1983 |
|
SU1191357A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1975 |
|
SU580338A1 |