(54) СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1975 |
|
SU580338A1 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1980 |
|
SU889880A2 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Система дистанционного и автоматического управления двигателем внутреннего сгорания | 1982 |
|
SU1059237A1 |
| Устройство для дистанционного управления многомашинным агрегатом | 1978 |
|
SU748348A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕЙ | 2003 |
|
RU2262609C2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1975 |
|
SU699218A1 |
| Система дистанционного управления двигателем внутреннего сгорания | 1980 |
|
SU866255A1 |
1
Изобретение относится к автоматическому регулированию двигателей внутреннего сгорания, а именно к системам дистанционного управления для двигателей внутреннего сгорания. По основному авт. св. № 580338 известны системы дистанционного управления для двигателя внутреннего сгорания, содержащие эадатчик с логическим блоком управления, связанным каналами с преобразователем, подключенным к сервомеханизму органа управления оборотами, соединенного при помощи датчика положения с логическим блоком, и снабженная двумя парами последовательно установленных логических элементов И и ИЛИ включенных соответственно в каналы связи логического блока и преобразователя и связанных с датчиком положения. В системе датчик может быть выполнен в виде кулачкового механизма и взаимодействующего с ним переключателя 1 .
Недостатком этой системы является невозможность дистанционного управления оборотами двигателей ниже упора реверсирования, что сужает функциональные возможности системы.
Цель изобретения - расширение функциональных возможностей известной системы.
Поставленная цель достигается тем, что система дополнительно снабжена указателем минимально устойчивой частоты вращения двигателя и переключа ацим устройством, причем входы логических элементсэ И подключены к выходам переключакицего устройства, а|лходы датчика положения и указания подключены каждый к одной из пар входов переключающего устройства и выход датчика положения дополнительно связан с логическим блоком управления.
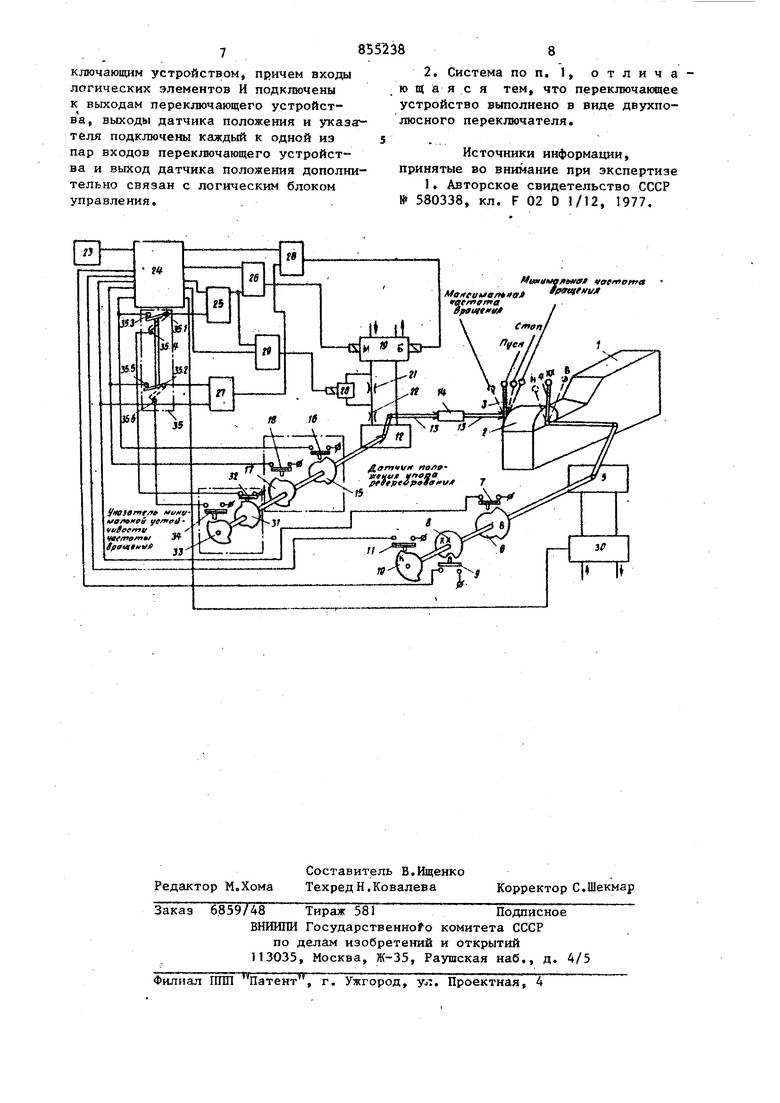
При этом переключающее устройство выполнено в виде двухполг .ного переключателя. 3 чертеже приведена схема систеДвигатель I снабжен местнымпост управления 2 с органом 3 управления оборотами и органом 4 управления переключением реверсмуфты. С органом 4 кинематически соединен сервомеханизм 5, выходной валик которого снаб жен кулачковым механизмом, содержащим кулачок 6, взаимодействующий в положени й Вперед (в) с переключателем 7, кулачок 8 - в пЪложении Хо лостой ход (XX) с переключателем 9 и кулачок10 - в положении Назад (Н) с переключателем И. С органом 3 соединен сервомеханизм 12 при помощи кинематической связи 13, снабженной упругим звеном 14 переменной длины. Сервомеханизм 12 снабжен датчиком положения упора реверсирования, вьтолненным в виде кулачкового механизма, взаимодействующего в положении Пуск (Упор реверсирования с переключателями: кулачок 15 с пер ключателем 16 и . кулачок. 1 7 с переключателем 18. Сервомеханизм 12 подключен гидравлическими каналами Больше (В) и Меньше (м) к преобразователям 19 и 20. Для регулирования скорости отработки сервомеханизма 12 в одном из гидравлических каналов встроены дро сели 21 и 22. Задатчик 23 подключен к преобраз вателям при помощи логического блока управления 24, связанного Двумя каналами (Больше и Меньше) с преобразователем 19 и одним каналом с преобразователем 20, В каналы свя логического блока 24 с преобразователем 19 включены две пары последовательно установленных логических элементов И и ИЛИ (элемент И 25 и элемент. ИЛИ 26 включены в канал М, элемент И 27 и элемент ИЛИ 28 вклю ны в канал Б соответственно). В канал связи логического блока с преобразователем 20 включены логи ческие элементы И 25 и ИЛИ 29. Выход датчика положения упора реверсирования сервомеханизма 12 дополнительно через переключатель 16 связан с логическим блоком управ ления 24. Сервомеханизм 5 подключен гидравлическими каналами к блоку преобразователей:30, связанному с логическим блоком 24. Для обеспечения работы двигателя упора реверсирования до положения минимально устойчивой частоты вращения сервомеханизм 12 снабжен указателем минимальной устойчивой частоты вращения, содержащим кулачок 31, взаимодействующий с выключателем 32, и кулачок 33 - с выключателем 34. Указатель минимально устойчивой частоты вращения подключен своими выключателями к логическим элементам И: выключателем 32 к элементу 27, выключателем 34 к элементу 25. Для исключения взаимного влияния указателя и датчика положения сервомеханизма 12 они подключены к элементам И 25 и 27 через переключающее устройство 35, выполненное в виде двухполюсного переключателя с выходами 35.1, 35.2., 35.3, 35.4, 35.5 и 35.6, KOTOjMje подключены ко входам различных элементов И (выход 35,1 к элементу И 25, а 35.2 - к И 27), а к одной из пар входом подключены выходы датчика положения (ЗЗ.З через переключатель 16, 35.4 через выключатель 32, 35.5 через переключатель 18 и 35.6 через выключатель 34 соответственно) и указателя (35.3 через выключатель 32, 35.6 через выключатель 34). Система работает следующим образом. при получении команды от задатчика 23 логический блок преобразует ее в сигналы для блока преобразователей 30 и для преобразователей 19 и 20. При помощи блока преобразователей 30, соединенных гидравлическими каналами с сервомеханизмом 5, последний устанавливает орган 4 местного поста 2 двигателя 1 в одно из положений (Н, XX или В). В положении В разрешается управление органом 3 управления частотой вращения . При подаче от задатчика 23 через , логический блок 24 и элемент ИЛИ 28 сигнала по каналу Б на преобразователь 19, последний подает рабочую жидкость в сервомеханизм 12, перемещая его выходной орган, и через кинематическую связь 13 орган 3 местногО поста 2 двигателя 1 на увеличение частоты вращения. При подаче сигнала через блок 24 и элемент ИЛИ 26 по каналуИ на преобразователь 19 орган 3 перемещается на ум шение частоты вращения. При плавном уменьшении частоты вращения двигателя (сигнал на преобразователь 20 от блока 24 не поступает и рабочая жидкость в сервомеханизм 12 поступает через два дро селя 21 и 22), прекращение перемещения органа 3 в положении Пуск (Упор реверсирования) достигается при отпускании переключателей J 6 и 18, взаимодействующих в этой точке с кулачками 15 и 17 соответственно Поскольку взаимная фиксация органа 3 и А местного поста жесткая, при неточной остановке сервомеханиз ма 12 может произойти заклинивание блокировочного механизма поста 2 или повышенные механические напряжения в сервомеханизме 12, кинематической связи 13 или посту 2. Для исключения этого в кинематической связи предусмотрено упругое звено 14 переменной длины. Оно позволяет изменить длину кинематической связи 13, не создавая нагрузок на пост 2 или механизм 12. При быстром уменьшении частоты вращения двигателя сигнал на преобразователь 20 поступает от блока 24 через элемент И 25 только при на жатом переключателе 16. Рабочая жидкость подается в механизм через дроссель 22, а дроссель 21 шунтируется открытым преобразователем 20. При этом возможен излишний выбег сервомеханизма 12, в результате устанавливаются малая частота вращения двигателя, при которых двигатель при реверсировании может заглохнуть. Во избежание-этого, при замыкании переключателя 18, подается сигнал через И 27 (при наличии на его втором входе сигнала от пере ключателя 7 в), через ИЛИ 28 по каналу Б на преобразователь 19. Сиг нал с преобразователя 20 при этом снимается и происходит медленное ув личение числа оборотов до размыкания переключателя 18. Большинство двигателей обеспечивает возможность работы при включенной муфте в положе нии Б при частоте вращения ниже упора реверсирования, вплоть до упора минимальной устойчивой частоты вращения. Хо 1тя при этом переключение передачи не производится, режим работы на ми нимально устойчивой частоте вращения двигателя требуется при работе с поисковыми аппаратами, которые буксируются вблизи дна (специальные телекамеры и т.п.), и в ряде других случаев, и такой режим работы двигателей может поддерживаться длительное время. Для обеспечения возможности дистанционного управления двигателями при чаете ге вращения меньте упора реверсирования и исключения при этом ошибок оператора переключающее устройство 35 переводят в положение, когда размыкаются его входы 35.3 и 35.5 и замыкаются входы 35.4 и 35.6. При этом от элементов И 25 и,27 отключаются соответственно переключателями 16 и 18 датчика положения упора реверсирования и подключаются выключатели 32 и 34 указателя минимальной устойчивой частоты вращения, а подключение переключателей 16 и 18 к блоку 24 сохраняется.Выключатели 32 и 34 принимают на себя управляющие функции переключателей 16 и 18, а блокировочные функции переключателей 16 и 18 в блоке 24 сохраняются, препятствуя переключению передачи при нажатом переключателе 18 (частота вращения двигателя меньше частоты вращения упора ревер сирования). При необходимости переключения передачи двигателя переключающее устройство 35 переводится в исходное положение. При этом сервомеханизм 12 автоматически переводится в положение На упоре реверсирования. Введение в систему указателя минимальноустойчивой частоты вращения переключающего устройства расширят функциональные возможности систеы путем управления двигателем на частке от частоты вращения упора еверсирования до минимально устойивой частоты вращения. Формула изобретения 1. Система дистанционного управлеия для двигателя внутреннего сгораия по авт., св. № 580338, отлиающаяся тем, что, с целью асширения функциональных возможнотей, система: дополнительно снабжена казателем минимально устойчивой астоты вращения двигателя и пере- .
ключающим устройством, причем входы логических элементов И подключены к выходам переключающего устройства, выходы датчика положения и yкaзa теля подключены каждый к одной из пар входов переключающего устройства и выход датчика положения дополнительно связан с логическим блоком управления.
2, Система по п. 1, отлича ю ц а я с я тем, что переключающее устройство выполнено в виде двухполюсного переключателя.
Источники информации, принятые во внимание при экспертизе
Мояикюняне «асяюнга
Mofreuoafrtfaf veitntema fffauteftf/f
