(54) П РБОБРАЭОВАТЕЛЬ П ЕРЕМЕИБНИЙ В КОЛ
образования кода программной скорости в напряжение и суммирующий усилитель, выход блока выбора знака соединен с тдним иэ входов первого блока преобразования частоты в код,другой вход котрого соединен с выходом блока выбора дискретности, а выход через блок преобразования кода фактической скорости в напряжение подключен к первому вхоДУ суммирующего усилителя, выход реверсивного счетчика через блок преобразования кода рассогласования в напряжение соединен со вторым входом сум1-1Ирующего усилителя и через блок преобра.зования кода в опорное напряжение подключен к одному из входов блока преобразования кода программной скорости в напряжение, входы реверсивного счетчика и второго бло1са преобразования частоты в код объединены и соединены С входными клеглма№1, выход второго блока преобразования частоты в код соединен с другим входом блока преобразования кода програт ной скорости в напряжение, выход которого соединен с третьим входом суммирующего усилителя.
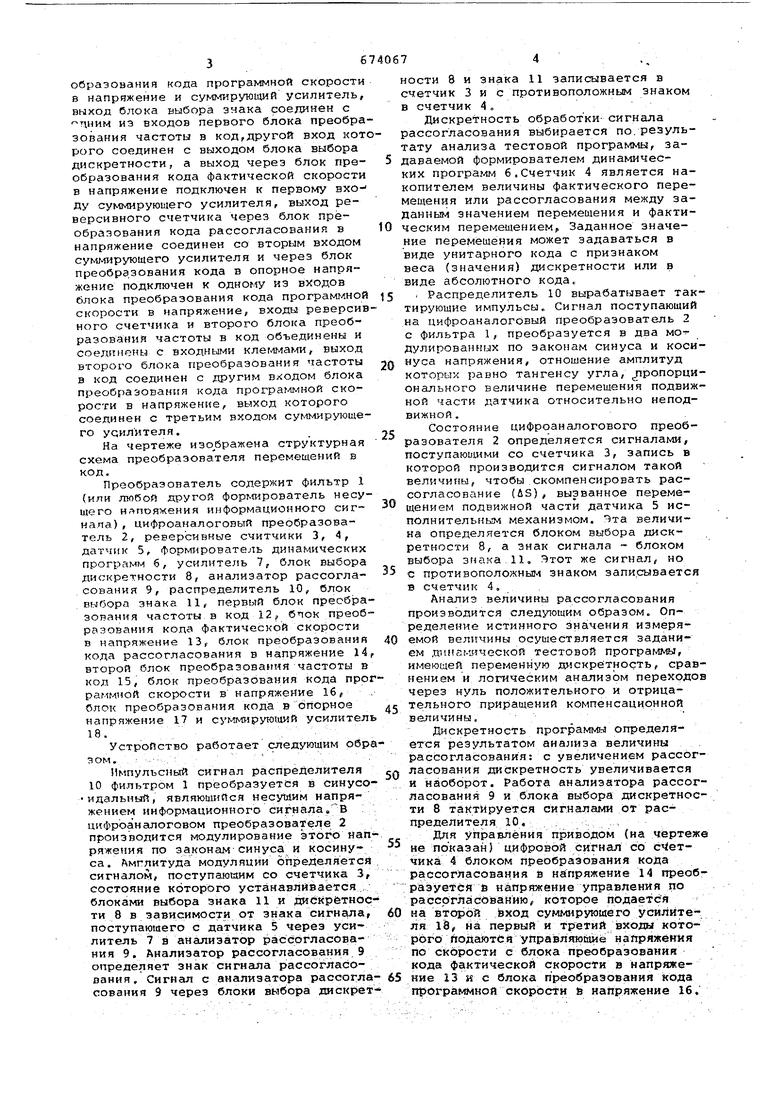
На чертеже изо бражена структурная схема преобразователя перемещений в код.
Преобразователь содержит фильтр 1 (или любой другой формирователь несущего нлпояжения информационного сигнала), циФроаналоговый преобразователь 2, реверсивные считчики 3, 4, датчик 5, формирователь динамических программ б, усилитель 7, блок выбора дискретности 8, анализатор рассогла.сования 9, распределитель 10, блок выбора знака 11, первый блок преобразования частоты в код 12, бпок преобразования кода фактической скорости в напряжение 13, блок преобразования кода рассогласования в напряжение 14 второй блок преобразования частоты в код 15, блок преобразования кода программной скорости в напряжение 16, блок преобразования кода в опорное напряжение 17 и су отруююий усилитель 18. ,,/.
Устройство работает следующим обрзом. -- . : ,
Импульсный сигнал распределителя 10 фильтром 1 преобразуется в синусоидальный, являющийся несутдим напряжением информационного сигнала.В : цифрЬаналоговом преобразовате е 2 производится модулирование этого напряжения по законс1м синуса и косинуса. ймглитуда модуляции определяется сигналом, поступающим со счетчика 3, состояние которого устанавливается блоками выбора знака 11 и дискретности 8 в зависимости от знака сигнала, поступаиэщего с датчика 5 через усилитель 7 в ансшиэатор рассогласования 9. Анализатор рассогласования 9 определяет знак сигнала рассогласования. Сигнал с анализатора рассогла сования 9 через блоки выбора дискрет
ности 8 и знака 11 записывается в счетчик 3 и с противоположным знаком в счетчик 4.
Дискретность обработки- сигнала рассогласования выбирается по,результату анализа тестовой программы, задаваемой формирователем динамических программ 6.Счетчик 4 является накопителем величины фактического перемещения или рассогласования между заданным значением перемещения и фактическим перемещением. Заданное значение перемещения может задаваться в виде унитарного кода с признаком веса (значения) дискретности или в виде абсолютного кода.
I Распределитель 10 вырабатывает тактирующие импульсы. Сигнал поступающий .на циФроаналоговый преобразователь 2 с фильтра 1, преобразуется в два мо- дулированиых по законам синуса и косинуса напряжения, отношение амплитуд которых равно тангенсу угла, тропорционального величине перемещения подвижной части датчика относительно неподвижной .
Состояние цифроаналогового преобразователя 2 определяется сигналами, поступаюидами со счетчика 3, запись в которой производится сигналом такой величины, чтобы .скомпенсировать рассогласование (US), вызванное перемещением подвижной части датчика 5 исполнительным механизмом, та величина определяется блоком выбора дискретности 8, а знак сигнала - блоком выбора .11, Этот же сигнеип, но с противоположным знаком запи,сывается в счетчик 4, .
Анализ величины рассогласования производится следующим образом. Определение истинного значения измеряемой величины осуществляется заданием динамической тестовой программы, имеющей переменную дискретность, сравнением и логическим анализом переходо через нуль положительного и отрицательного приращений компенсационной величины.
Дискретность программы определяется результатом анализа величины рассогласования: с увеличением рассогласования дискретность увеличивается и наоборот. Работа анализатора рассогласования 9 и блока выбора дискретности 8 тактируется сигналами от распределителя 10.
Для управления приводом (на чертеж не показан) цифровой сигнал со сЧеччика 4 блоком преобразования кода рассогласования в напряжение 14 преобразуется и напряжение упра1вления по рассогласованию; которое подается на второй вход суммирующего усилителя 13, на первый и третий входы котордгО йодаютС я управляюйдаё напряжения По скбрости с блока преобразовании кода фактической скорости в напряжение 13 и с блока преобраэоваиия кода программной скорости 6 иапряжение 16. 5 Определение кодового эквивалента фактической скорости перемещения про изводится путем преобразования частоты следования импульсных сигналов компенсации рассогласования с учетом величины их дискретности блоком преобразования частоты в код 12, Управляющее напряжение фактическо скорости перемещения компенсирует управляющее напряжение программной скорости и поэтому подается на вход суммирующего усилителя с обратным знаком. Получение управляющего напряжения пропорционально программируемому (за данному) значению скорости производи ся с помощью блока преобразования 4ac тоты (унитарного кода) в код 15 и пос ледующему преобразованию кода скорост блоком 16. Задание программной скорос ти может Производиться заданием частоты унитарного кода с признаком веса (значения) дискретности или в виде абсолютного значения кода скорости При задании программной сокрбсти в ви де абсолютного значения кода скорости /отпадает необходимость в применении блока 15, т.к. код скорости может быть подан непосредственно на вход блока преобразования 16. Для уменьшения динамических noi- решностей преобразователя вызванных переходными npoueccaNm управления и привода производится измерение коэфФпцнепта передачи (коутиэны) блока преобразования кода программной скоро сти в яапряжеине 16 в зависимости от величины рассогласования, сформированной в с ютчике 4. Изменение коэффициента передачи в канале скорости возможно благодаря / изменению опорного напряжения блока преобразования 16. Изменение опорно го напряжения пpo звoдитcя блоком преобразования кода в опорное напряжение 17 в зависимости от величины и знака кода рассогласования. . При величи 1е рассогласования равной нулю блок преобразования 17 формирует номинальную величину опорного напряжения, положительное рассогласование приводят к уменьшению опорного напряжения и уменьшению коэффициента передачи блока преобразования 16, что способствует более быстрой обработке рассогласования. Отрицательное рассог ласование приводит к увеличению опорного напряжения и увеличению коэффициента передачи блока преобразования 16, что приводит к более быстрой обработке рассогласования , Аналогичное изменение коэффициента передачи за счет изменения опорного напряжения возможно Производить и блоком прёЬ15разования 13, Ввежекие дополнительных блоков позволяет П1 Ьв6дить Дополнительное 7 управление приводом по каналу скорости, rto существенно расширяет возможность преобразователя, кроме того, применение блоков получения и преобразования фактического значения скорости перемеиения и изменения коэффициента преобразования управляющего напряжения rfo каналу скорости в зависимости от величины рассогласования, значительно повышает точность преобразования и уменьшает динамическую погрешность преобразователя. Экономический эффект от внедрения предполагаемого изобретения может быть получен за счет получения более высоких точностных показателей при контурном режиме управления, что даст воэмож юсть повысить как производительность/ так и качество управления объектом и составит экономик) не менее 400 руб. на одно устройство. Формула изобретения Преобразователь перемещений в код по авт.св. № 51974G, отличающийся тем, что, с целью повыше- . ни я точности устройства и расширения его функциональных возможностей, в преобразователь введены блоки преобразования частоты в код, преобразования кода фактической скорости в напряжение, преобразования.кода рассогласованля в напряжение, преобразования кода а опорное напряжение, преобразования кода программной скорое-: ти в напряжение и суммирующий усилитель, выход блока выбора знака соединен с одним из входов первого блока преобразования частоты в код, другой вход которого соединен с выходом бло«а выбора дискретности,а выход через блок преобразования кода фактической скорости в напряжение подключен к первому входу суммирующего усилителя,выход реверсивного счетчика через блок преобразования кода рассогласования в напряжение соединен со вторым входом суммирующего усилителя и Через блок преобразования кода в опорное напряжение подключен к одному из входов блока преобразования кода программной скорости в напряжение, входы реверсивного счетчика и второго блока преобразования частоты в код объединены и соединены с входными , выход второго блока преобразования частоты в код соединен с другим входом блока преобразования кода nporpaNO Hod скорости в йапрялкёние, выход которогб соединен с третьим входом о мируюшегО Усилителя..-:-:---ч;.-::: Источники информации, npHHetijte во внимание приэкспертизе . 1 а Авторское свидетельство СССР 519746, кл. G 08 С 9/00, 1974
&JS
t l
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений в код | 1977 |
|
SU620999A2 |
| Устройство для преобразования перемещений в код | 1978 |
|
SU742999A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Преобразователь перемещений в код | 1975 |
|
SU543978A2 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1272507A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| Устройство для преобразования "перемещение-код-фаза" | 1977 |
|
SU670956A1 |
| Цифровой следящий привод | 1978 |
|
SU734607A1 |
| Преобразователь перемещений в код | 1974 |
|
SU519746A1 |

re
JS
«
и
7J
