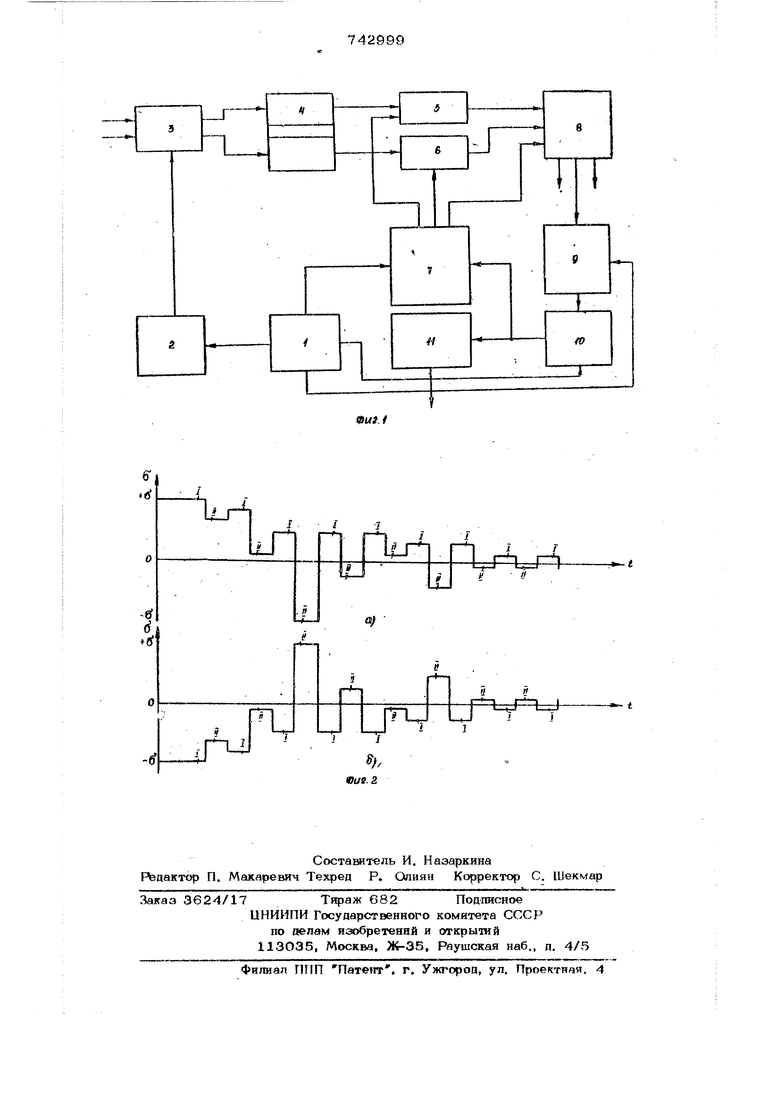
Изобретение относится к системам ав томатического управления для цифровой индикации положения элементов управляемого объекта, а именно, к преобразователям перемещений в код. Известно устройство для преобразования угловых перемещений в код, содержаихее синусно-косинусный преобразователь, соединенный через усилитель и коммутатор с реверсивным счетчиком, в котрром гстанОвлен цифроаналоговый преобразователь, соединенный с синуснб-кос нусным преобразователем jjl . Недостаток этого устройства состоит в сравнительно низкой точности. Наиболее близким по техническому решению к данному устройству является устройство для преобразования перемещений в код, содержащее датчик, выход которого через блок усилителей соединен с первым входом цифроаналогового преобразователя, выход которого соединен с первым входом блока, выбора знака. распределитель сигналов, первый выход которого через фильтр соединен с входом датчика, второй выход - с первым входом анализатора рассогласования, к второму входу которого подключен выход блока выбора знака, третий выход распределителя сигналов соединен о первым входом блока выбора дискретности, к второму входу которого подключен выход анализатора рассогласования, а к выходу вход реверсивного счетчика 2 . Недостаток этого устройства состоит в сравнительно низком быстродействии и помехоустойчивости иэ-за искажений информационных сигналов несущей частоты запитки датчика, вызываемыми ступенчатым воздействием сигналов по цепи обратной связи. Цель изобретения - повьтшение быстродействия и помехоустойчивости устройства для преобразования цереметений в код. Поставленная цель достигается тем, что в устройство введены синусно-косниусный шфровой 1 реобразователь и доиолиит-ельный 1шфроаналоговь1Й преобрайоватепь, первый вход которого через блок усилителей соединен со вторым выходом датчика, а выход - с вторым дом блока выбора знака, третий вход которого и вторые вхопы цифроаналоговых Преобразоватепей соединены с выходами синусно-косинусного цифрового греобразователя, первый вход которого соепинен (J выходом блока выбора дискретности, ф-орой вход - с четвертым выходом расфеделителя сигналов. rta фиг. 1 изображена структурная схе иа устройства для преобразователя перемещений в код| на фиг. 2 - диаграммы распределения сигналов рассогласования, Устройство для нреобразования перемещений в код содержит распределитель 1 сигналов, фильтр 2, датчик 3, блок 4 усилителей, ци(})роаналоговый преобразоЕ атель (11АП) 5, дополнительный шфроаналоговый преобразователь (ЦАП) б, синусно-косинусный цифровой преобразователь 7, блок 8 Bbi6opa знака, анализатор 9 рассогласования, блок 10 выбора дискретности, реверсивный счетчик 1 Выходы датчика 3 через блок 4 усилителей соединены с входами пифроанало ровых преобразователей 5 и 6, вьгхопы Горых соединены соответственно с перйым и вторым входами блока 8 выбора знака. Первр гй, второй, третий и .четвертый выходы рас преде пите ля 1 сигналов соединены соответственно с входом филь ра 2, с первыми входами анализатора 9 рассогласования и блока 10 выбора писк ретности, со вторым входом синуско-кос пусного преобразователя 7. Выход блока Ю выбора дискретности соединен с входом реверсивного счетчика 11. Перйьгй, второй и третий выходы синусна-ко синусного преобразователя 7 соединены сооТветственно с вторыми входами цифр аналоговых гфеобразователей 5 и 6 и с Третьим входом блока 8 выбора знака. Вькод блока 8 выбора знака соединен G вторым входом анализатора 9 рассог Лаоования. Выход анализатора рассогласования 9 соединен с вторым входом бл ka 10 выбора дискретности, выход кото рого соединен с первым входом синусно кос.инусного преобразователя 7, второй йхоц которого соединен с входом датчик 3. Рассмотрим работу устройства на гримере работы с датчиком типа кругоrjoro индуктосина, . Импульсный распределителя 1 фпльтром 2 преобразуется в синусоидальный V|. у.1 Sin Wt, .являющийся сш -налом запитки роторной обмотки- дарчика. С выходных обмоток датчика 3 снимаются информационные сигналы, промоцулированные по амплитуде по законам синуса и косинуса при неремещенкти на угол 0 подвижной и неподвижной частей датчика относительно друг друга. Усиленные блоком 4 зСилителей сигналы со статорной обмотки датчика Urn.St--ne,UtnCo5e в виде опорных напряж.ений поступают в цифроаналоговые преобразователи 5 и 6. Синусно-косинусный цифровой преобразователь 7 вычисляет текущие значения функш й Sin и по значениям Ейлигшны J, , являющейся электрическим эквивалентом механического перемещения 0. Вел.ичинь указанных функ1.и1й, выраженные в двоичном коде, поступают на входы п1п:}роаналоговых преобразователей 5 и 6, на выходах которых образ./;зтс.я напряжения; l/Bbsx 1 Urn 5-1пл &OS 0 . Urn Cosс(. Sine Из цифрового преобразоватеjiH 7 в блоке выбора знака вводится информация о знаках StTtd и 1о5аС;позволяющая судить о ТОК , в какой четв;ерти периода информационного сигнала происходит работа. Ei соответст ии с этим выбираются знаки произведений Sm(Cos9 и Cose( . Анализатор 9 рассогласования решает уравнение (5-Si.n.()-S;itc(CosB-Cosci(Sc.-h.0 и определяет знак величины рассогласования ( или ). В зависимости от знака рассогласоВЗ.Н.НЯ цифровой 1феобразою.тель 7 с дискретностГаЮ, заданной блоком 10 выбора дискретности, производит выравнивание фаз между S iu с и 5tti9, Cosdt и Cos в до тех пор, пока величина рассогласования не будет меньшей одной дискреты. Величины приращений отрабатываемого рассогласова1 ия с блока выбора дискрет ности поступают на синусно-косинусный цифровой преобразователь 7 в двоичном коде со знаком, определяемым знаком рассогласования. При этом в реверсивный счетчик .11 приращения записываются со знаком, противоположным знаку записи .в цифровой преобразователь 7.
Расitpeцелитель 1 вьфабатывает последовательность тактовых импульсов, которые паралпелыю вьгцаются в анализатор рассогласования, блок выбора пискретности и в цифровой синусио-косинусный преобразователь.
Анализатор рассогласования и блок выбора дискретности работают следующим образом.
Определение истинного значения измеряемой величины осуа1ествляется последовательным заданием приратершй компенсационной величине, равных удвоенной величине дискретности и противоположных знаку текущего рассогласования.
Ecmi по опросу 1 (фиг. 2 (Х) величина рассогласования оказывается положительной, то компенсационной величине дается отрицательное приращение, равное удвоенной велич ше дискретности. Если по опросу и (фиг. 2 О.), велишна рассогласования также положительна, то положительное приращение- дается равным половине предыдущего приращения, а следующее отрицательное приращение равным удвоенному отрицательному приращению. Если оказывается, что по опросу 1 рассогласование отрицательно, то следующее положительное приращение равно предыдущему отрицательному, а следующее отрицательное - половине предыдущего положительного.
При отработке отрицательных рассогласований по опросу 1 (фиг. 26) знаки выдаваемых приращений меняются на противоположные относительно тех, что описаны в вышеизложенном алгоритме работ анализатора рассогласования и блока выбора дискретности.
Работа с перекгенной дискретностью увеличивает скорость преобразования. Порешность измерения при этом не превышает выбранной дискретности.
Из описания структурной схемы и -работы функциональных ча9тей преобразователя Ш1ДНО, что динамическая программа, обуславливающая ступенчйтое воздействие на узлы и стгязк системы, не воздействует на входные и выходные сигнал датчика, имеющие достаточно малый уровень информационных сигналов. Такой режим облегчает работу усилителей, имею- цщх в своем составе фил игры несущей частоты для выделения и усиления информационных сигналов с уровнем единиц микровольт.
Исключение ступенчатых воздействий на датчик и усилитель снижает урож-нь
: ..V : -. .leiibijjaeT вре.-(Я успокоепия ,, ci:j:;ireJiaH, что повышает нок ехоустойчивостг: 11 быстродействие всей системы в пелпм,
г;Эконо «ический э44ект от внедрения
может быть получен за счет сокращения оборудов-авшя, так как повышеггае быстродпйствия преобразователя в два раза позволяет использовать один преобразователь 10 для работы с двумя ; датчиками. При стоимости одЕюго преобразоват еля 1, 5 тыс. руб. экономический эффект от применения в устройстве числового программного управления одного преобразо55 вате ля вместо двух состав1гг порядка 1.2 тыс. рублей.
Формула изобретения Устройство для преобразования переме ценнй в код, содержащее датчик, первый 30 выхоа которого через блок усилителей со-зцинеь с nepebiNf входок цифроаналогового преобразовате;1я, выход которого соецинен с пернык входом блока выбора зтшка, распределитель сигналов, первый 5 выход которого через фильтр соединен с входом датчика, второй выход - с первым входом ана.шшатора рассогласования, к второму входу которого подключен блока выбора знака, третий выход 0 распределителя сигналов соединен с пер)- входом блока выбора дискретности, к второму ачоду которого подключен выхоа анализатора рассогласования, а к выхоцу - вход реверсивного счетчика, о т 5 л и ч а ю III е е с я тем, что, с целью Г1овы-ше и1я быстродействия и помехоустойч-гвости устройства, в него введены cmtycHO-косинусный цифровой преобразователь и дополнительный шгфроаналого-С вып npeo6pav3OKiTen.b, первый вход которого через блок усилителей соединен со вторым выходом датчика, а выход - с вторым входом блока выбора знака, третий вход которого и вторые входы дифроS аналоговых преобразователей соединены с выходами синусно-косинусного цифрового преобразователя, первЕ н вход которого соединен с выходом блока выбора дискретности, второй вход - с чет0 вертым выходом распределителя сигналов.
Источники информации, принятые во Енима1ше при .экспертизе
1.Зверев А. Е. и др. Преобразо5 гштели угловых перемещений в цифровой
код, 1974, с. 138.
2.Авторское свидетельство СССР j 519746, кл. & 08 С 21/00, 1974 (прототип).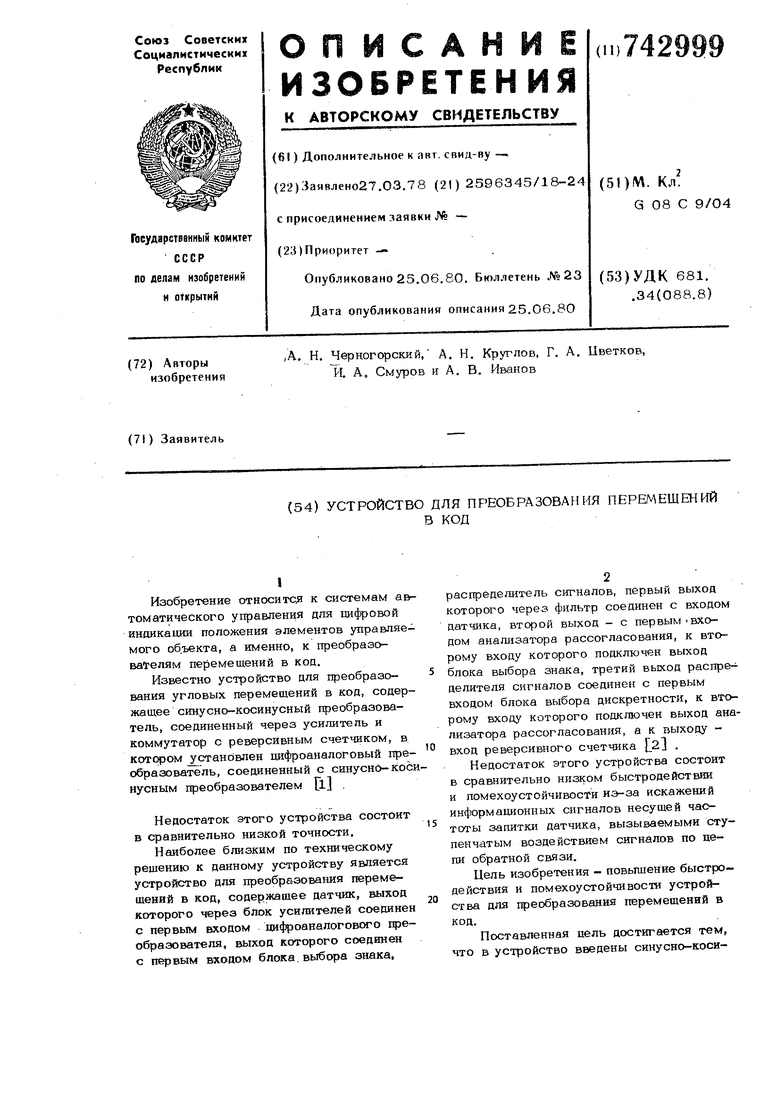
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| Преобразователь перемещений в код | 1977 |
|
SU674067A1 |
| Преобразователь перемещений в код | 1977 |
|
SU620999A2 |
| Преобразователь перемещений в код | 1974 |
|
SU519746A1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Преобразователь перемещений в код | 1975 |
|
SU543978A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| Преобразователь угол-код | 1986 |
|
SU1336242A1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |