1
Изобретение относится к электротехнике, а именно к электроприводу, и может быть использовано в электроприводах лифтовых установок, металлорежущих станков и в других производительных механизмах, где требуется регулирование скорости электродвигателя в торйозном режиме.
Наиболее близким к изобретению по технической сущности и достигав мому результату является электропривод, содержащий асинхронный электродвигатель с высокоскоростной и низкоскоростной обмотками статора, в две фазы каждой из которой включены пары встречно параллельных тиристоров и блоки их управления.
Однако недостатком этого устройства является значительный нагрев электродвигателя и вследствие этого большие потери электроэнергии.
Цель изобретения - уменьшение потерь электроэнергии.
Поставленная цель достигается -введением блока уменьшения угла нагрузки, выполненным, например, в виде активных сопротивлений, и подключенным параллельно низкоскоростной обмотке, которая включена согласно вы-: со коскоростной обмотке, а в третьи.
фазы каждой из указанных обмоток дополнительно включены пары встречно параллельных тиристоров.
. Кроме того, устройство снабжено подключенным к низкоскоростной обмотке, которая соединена в треугольник, датчиком тока, выход крторого подключен ко входу блока управления тиристорами низкоскоростной обмотки
10 статора.
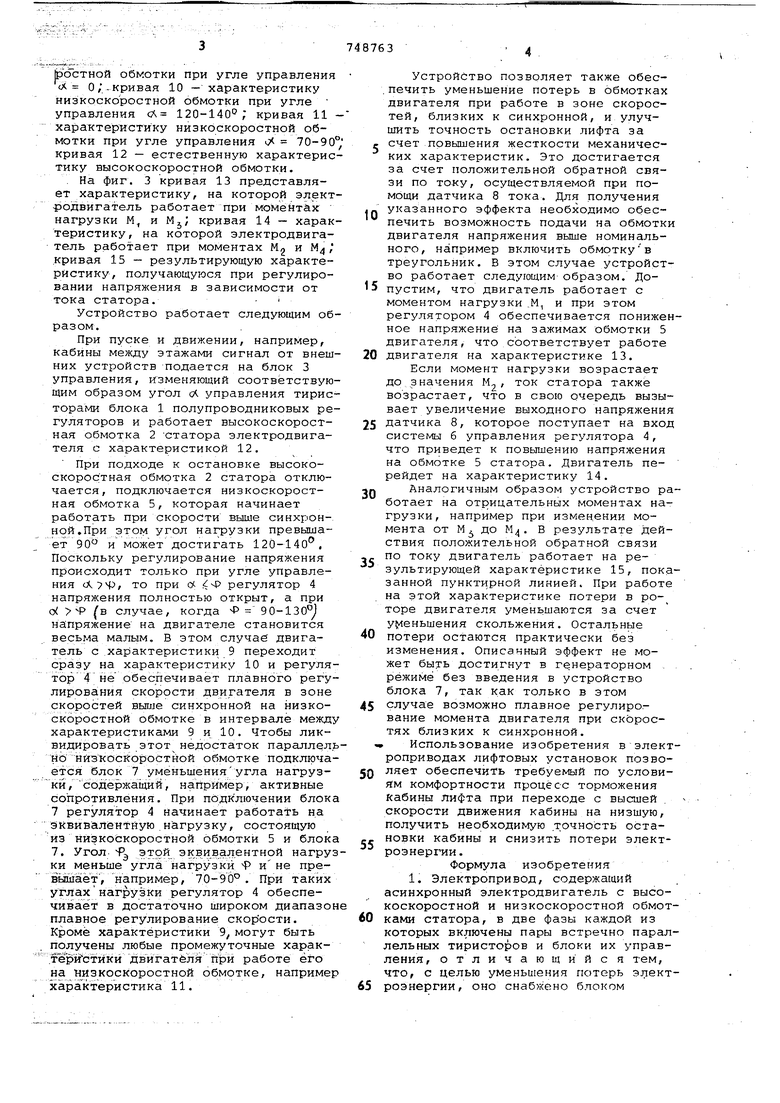
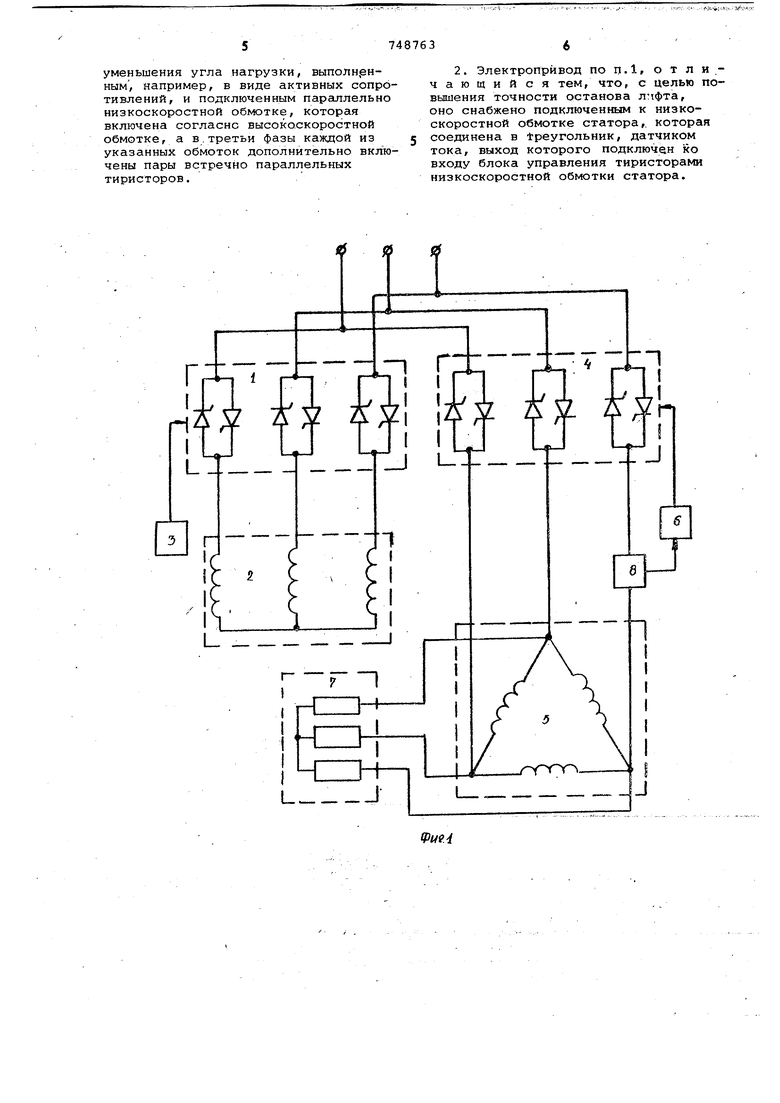
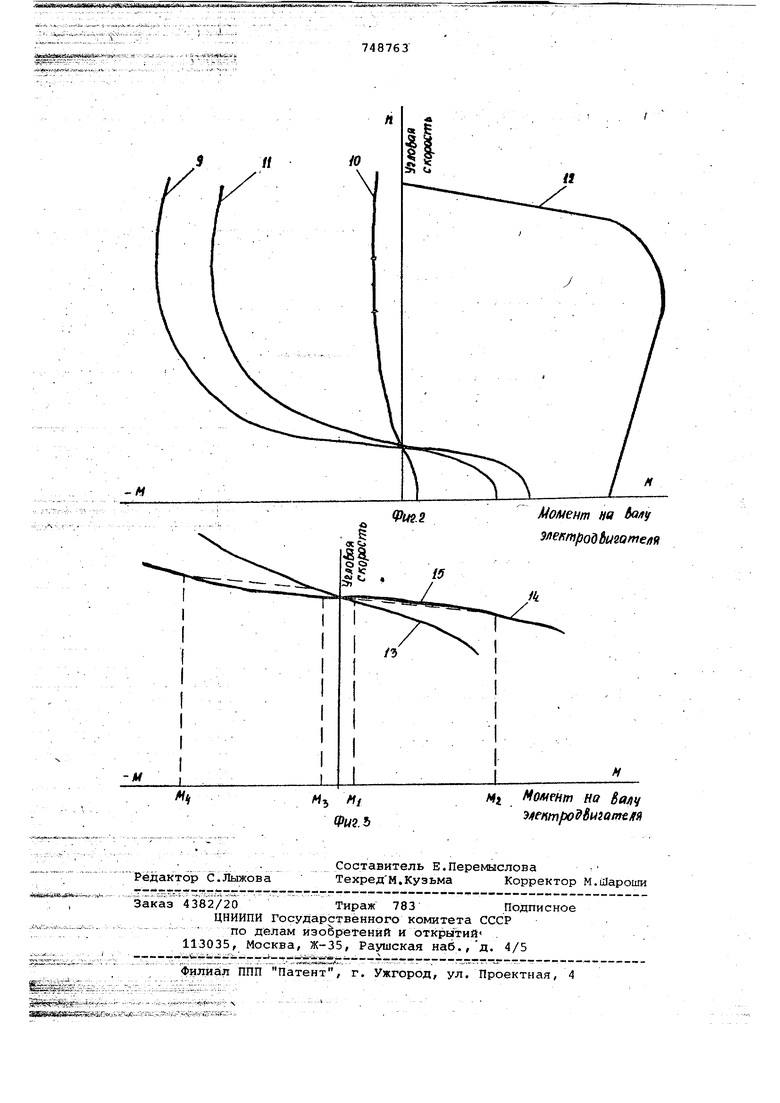
На фиг. 1 представлена схема устройства; на фиг. 2 - механические характеристики асинхронного двухобкоточного электродвигателя; на фиг.З 15 механические характеристики низкоскоростной обмотки электродвигателя;
Устройство содержит блок 1 полупроводниковых регуляторов высокоскоростной обмотки 2 статора с блоком
20 3 управления и блок 4 полупроводниковых регуляторов низкоскоростной сб.мотки 5 со своим блоком б управления.
Параллельно низкоскоростной обмотке 5 включен блок 7 уменьшения угла
25 нагрузки, кроме тогор к низкоскоростной обмотке статора подключен датчик 8 тока, выход которого соединен с блоком б управления. .
На фиг. 2 кривая 9 изображает естественную характеристику низхоско-.
ьЪстной обмотки при угле управления Х О/.кривая 10 - характеристику низкоскоростной обмотки при угле управления сЛ 120-140°; кривая 11 характеристи ку низкоскоростной обмотки при угле управления / 70-90° кривая 12 - естественную характеристику высокоскоростной обмотки.
На фиг. 3 кривая 13 представляет характеристику, на которой электродвигатель работает при моМейтах нагрузки М, и кривая 14 - характеристику, на которой электродвигатель работает при моментах Мд и М , кривая 15 - результирующую характеристику, получающуюся при регулировании напряжения в зависимости от тока статора.. j
Устройство работает следующим образом.
При пуске и движении, например, кабины между этажами сигнал от внешних устройств подается на блок 3 управления, изменяющий соответствующим образом угол сЛ управления тиристорами блока 1 полупроводниковых регуляторов и работает высокоскоростная обмотка 2 статора электродвигателя с характеристикой 12.
При подходе к остановке высокоскоростная обмотка 2 статора отключается, подключается низкоскоростная обмотка 5, которая начинает работать при скорости выше синхрон-, ной,При этом угол нагрузки превышает 90 и может достигать 120-140, Поскольку регулирование напряжения происходит только при угле управления Л7Ч, то при о: .--Р регулятор 4 напряжения полностью открыт, а при о Р fв случае, когда 90-130j напряжение на двигателе становится весьма малым. В этом случае двигатель с .характеристики 9 переходит сразу на характеристику 10 и регулятор 4 не обеспечивает плавного регулирования скорости двигателя в зоне скоростей выше синхронной на низкоскоростной обмотке в интервале между характеристиками 9 и 10. Чтобы ликвидировать этот недостаток параллельно Нйз кос1 оростной обмотке подключается блок 7 уменьшенияугла нагрузки, содержащий, нагтрй мер, активные сопротивления. При подключении блока 7 регулятор 4 начинает работать эквивалентйую .нагрузку, состоящую из низкоскоростной обмотки 5 и блока 7. Угол. -Р этой эк вивал.ентной нагрузки меньше угла нагрузки э ине превышает, например, 70-90°. При таких углахнагрузки регулятор 4 обеспечивает в достаточно широком диапазон плавное регулирование скорости. Кроме характеристики 9 могут быть получены любые промежуточные харак.терЙстикй двигатёлй при работе его на мизкоскоростной обмотке, например характеристика 11.
Устройство позволяет также обес.печить уменьшение потерь в обмотках двигателя при работе в зоне скоростей, близких к синхронной, и улучшить точность остановки лифта за счет повышения жесткости механических характеристик. Это достигается за счет положительной обратной связи по току, осуществляемой при помощи датчика 8 тока. Для получения указанного эффекта необходимо обеспечить возможность подачи на обмотки двигателя напряжения выше номинального, например включить обмотку в треугольник. В этом случае устройство работает следующим образом. Допустим, что двигатель работает с моментом нагрузки .М, и при этом регулятором 4 обеспечивается пониженное напряжение на зажимах обмотки 5 двигателя, что соответствует работе двигателя на характеристике 13.
Если момент нагрузки возрастает до значения М, ток статора также возрастает, что в свою очередь вызывает увеличение выходного напряжения датчика 8, которое поступает на вход системы б управления регулятора 4, что приведет к повышению напряжения на обмотке 5 статора. Двигатель перейдет на характеристику 14.
Аналогичным образом устройство работает на отрицательных моментах нагрузки, например при изменении момента от M., до М . В результате действия положительной обратной связи по току двигатель работает на результирующей характеристике 15, показанной пунктирной линией. При работе на этой характеристике потери в роторе двигателя уменьшаются за счет У еньшения скольжения:. Остальные потери остаются практически без изменения. Описанный эффект не может быть достигнут в генераторном . режиме без введения в устройство блока 7, так как только в этом случае возможно плавное регулирование момента двигателя при скоростях близких к синхронной. Использование изобретения в электроприводах лифтовых установок позволяет обеспечить требуемый по условиям комфортности процесс торможения Кабины лифта при переходе с высшей скорости движения кабины на низшую, получить необходимую точность остановки кабины и снизить потери электроэнергии.
Формула изобретения
1. Электропривод, содержа аий асинхронный электродвигатель с высокоскоростной и низкоскоростной обмотками статора, в две фазы каждой из которых включены пары встречно параллельных тиристоров и блоки их управления, отличающейся тем, что, с целью уменьшения потерь электроэнергии, оно снабжено блоком
уменьшения угла нагрузки, выполн,енным, например, в виде активных сопротивлений, и подключенным параллельно низкоскоростной обмотке, которая включена согласно высокоскоростной обмотке, а в.третьи фазы каждой из указанных обмоток дополнительно вклк)чены пары встречно параллельных тиристоров.
2. Электропривод по n.lr о т л и ,чающийся тем, что, с целью повышения точности останова лмфта, оно снабжено подключенным к низкоскоростной обмотке статора,, которая соединена в ±реугольник, датчиком тока, выход которого подключен ко входу блока управления тиристорами низкоскоростной обмотки статора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1983 |
|
SU1099372A1 |
| Устройство для управления асинхронным двигателем с фазным ротором | 1978 |
|
SU775852A1 |
| Электропривод переменного тока | 1983 |
|
SU1128362A1 |
| Асинхронный электропривод | 1986 |
|
SU1334346A1 |
| Электропривод механизма подъема башенного крана с параметрическим управлением | 2017 |
|
RU2666494C1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| Устройство для управления короткозамкнутым асинхронным электродвигателем | 1979 |
|
SU866680A1 |
| Электропривод переменного тока | 1979 |
|
SU817956A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1969 |
|
SU235154A1 |
| Способ пуска асинхронного электродвигателя и устройство для его осуществления | 1990 |
|
SU1774453A1 |
I J
