1
Изобретение относится к электротехнике и может быть использовано в системах автоматического регулирования, например, в высокоточных безредукторнык следящих электроприводах. 5
Известен безредукторный электропривод, содержащий исполнительный коллекторный двигатель постояниого тока, установленный на валу нагрузки, усилитель мощности и датчик псхпоже- 10 ния, расположенный на указанном вешу и подключенный к входу усилителя мощности р. .
Данное устройство является наиболее близким по технической сущности 15 и достигаемому результату.
Недостатком данного устройства является наличие коллекторных пульсаций ЭДС двигателя, что снижает 1чэчность и плавность отработки входного 20 воздействия.
Целью данного изобретения является повышение точности отработки входного воздействия.
Цель обеспеч вается тем, что в 25 электропривод вводят второй исполнительный коллекторный двигатель постоянного тока, устанавливая его на валу нагрузки, якорную обмотку дополнительного двигателя соединяют после-30
довательно с якорной обмоткой основного исполнительного двигателя, подкляусая свободные входы якорных обмоток указанных двигателей к выходу згсилителя мощности, а статор одного из двигателей выполняют с возможностью поворота на угол |,где К - число коллекторн пластин якоря двигателя.
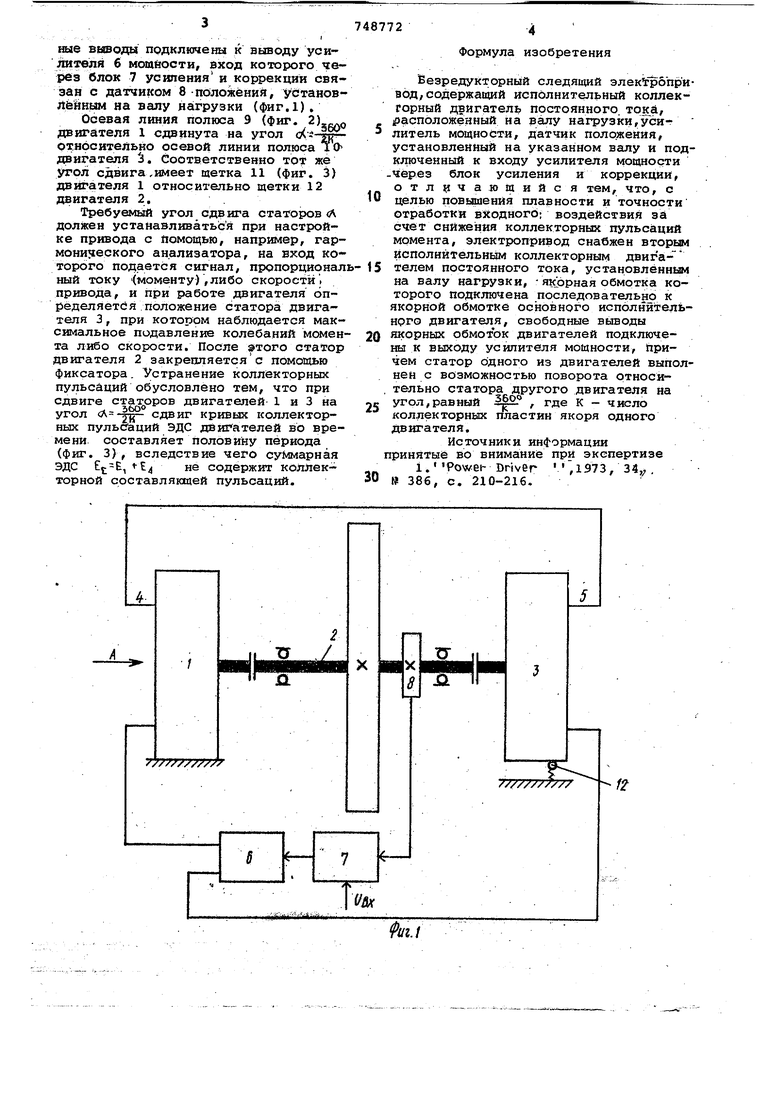
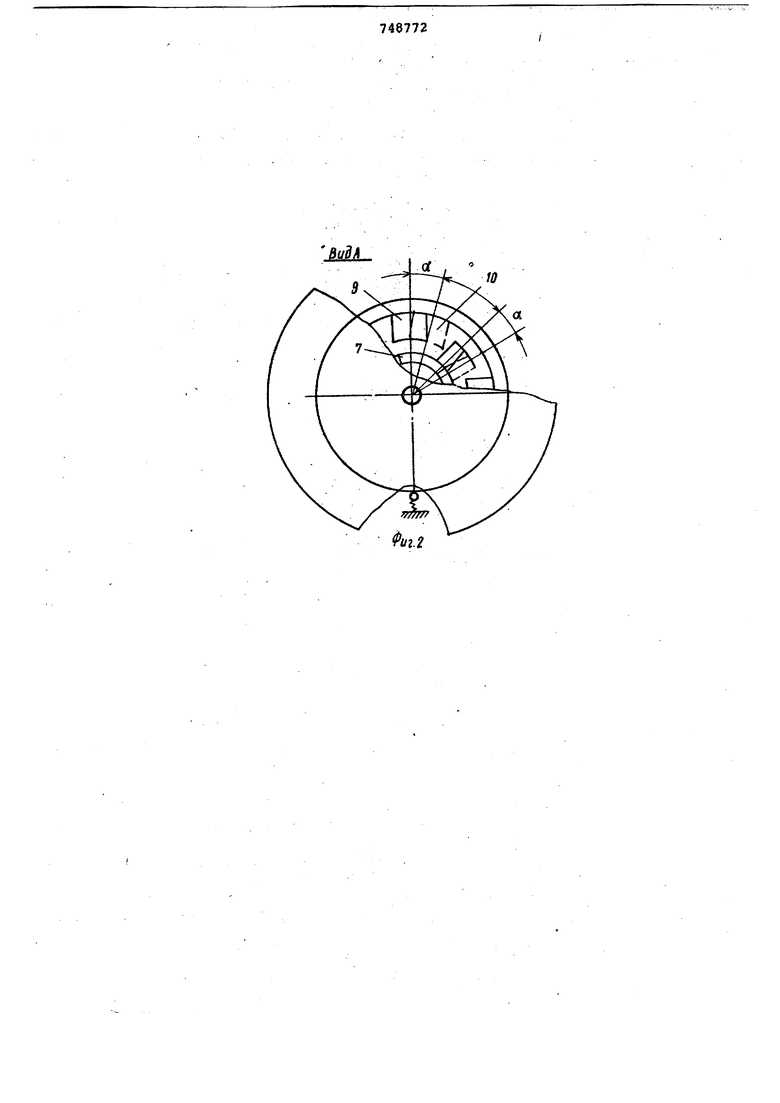
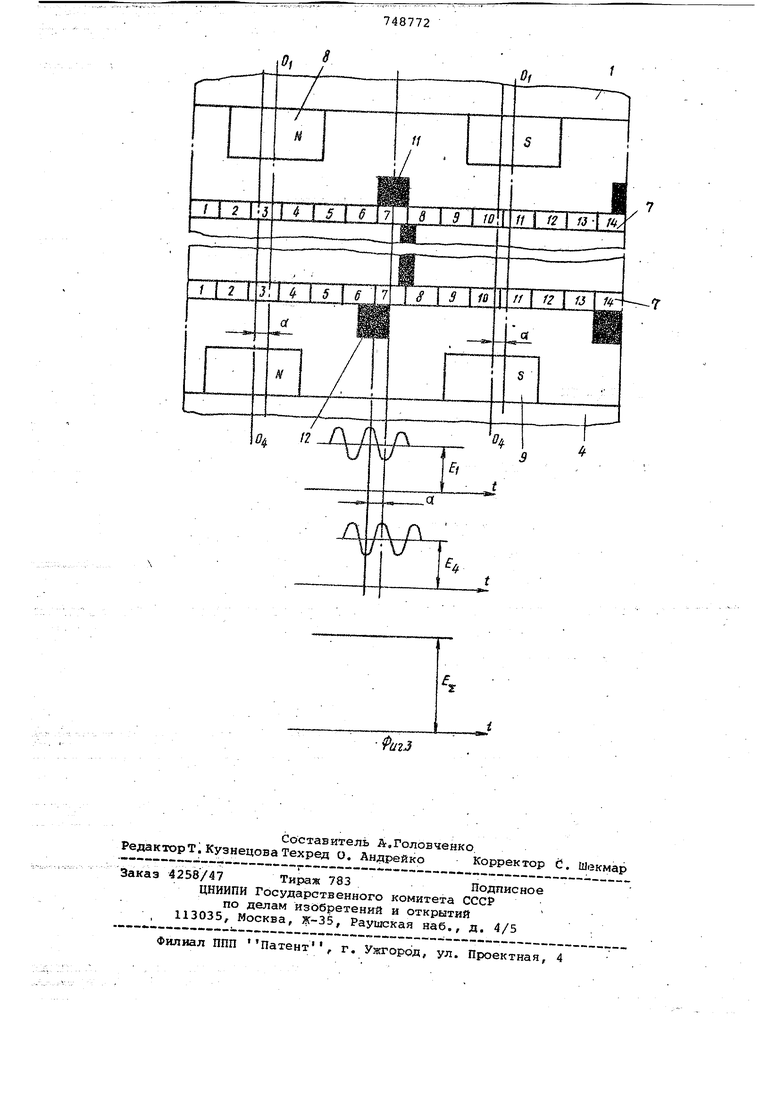
На фиг. 1 -предлагаемый электропривод, блок-схема на фиг. 2 - совмещенное изображение двигателей при сдвиге их статоров на угол / ; на фиг. 3 - развернутая схема двух статоров и коллекторов и кривые коллекторных пульсаций ЭДС двигателей.
безредукторный следящий электропривод содержит исполнительный коллек торЕшй двигатель 1,статор которого жестко установлен на неподвижной части приводимого устройства, а якорь установлен на валу 2 нагрузки. Статор второго исполнительного коллекторного двигателя 3 выполнен подвижным и 1меет возможность поворачиваться относительно статора двигателя 1 на угол где К - число коллекторных пластин якоря второго двигателя. Якорные обмотки 4 и 5 двигателей соединены последовательно, а их свободные в|ЁШода подключены к выводу усилителя б момйости, вход которого через блок 7 усиления и коррекции связан с датчиком 8-положения, убтановЛёйнЕЛМ на валу нагрузки (фиг.1) . Осевая линия полюса 9 (фиг. 2)g-o двигателя 1 сдвинута на угол Х--то относительно осевой линии полюса 10 двигателя 3. Соответственно тот жб угол сдвига,имеет щетка 11 (фиг. 3) двигателя 1 относительно щетки 12 двигателя 2. Требуемый угол сдв ига статоров Л должен устанавливаться при настройке привода с помощью, например, гармониугеского анализатора, на вход которого подается сигнал, пропорционал ный току (моменту),либо скорости; привода, и при работе двигателя 6прёделяетйя.положение статора двигателя 3, при котором наблюдается максимальное подавление колебаний момен та либо скорости. После этого статор двигателя 2 закрепляетсяс помощью фиксатора. Устранение коллекторных пульсаций обусловлено тем, что при сдвиге статоров двигателей 1 и 3 на угол Л 1 сдвиг кривых коллекторных пульсаций ЭДС двигателей во времени составляет половину периода (фиг. 3), вследствие чего суммарная ЭДС 4 н® содержит коллекторной составляющей пульсаций. Формула изобретения Безредукторный следящий электропривод/содержащий исполнительный коллекгорный двигатель постоянного, тока, расположённый на валу нагрузки,уси-г литель мощности, датчик положения, установленный на указанном валу и подключенный к входу усилителя мощности через блок усиления и коррекции, отл 1чающийс я тем, что, с целью повышения плавности и точности отработки ВХОДНОГО; воздействия за счет снижения коллекторных пульсаций момента, электропривод снабжен вторым исполнительным коллекторным двига- телем постоянного тока, установленным на валу нагрузки, як Орная обмотка которого подключена последовательно к якорной обмотке основного исполнительного двигателя, свободные выводы якорных обмоток двигателей подключены к выходу усилителя мощности, причем статор Одного из двигателей выполнен с возможностью поворота относительно статора другого двигателя на угол,равный f , где К - число коллекторных пластин якоря одного двигателя. Источники информации ринятые во внимание при экспертизе l.Poweh Driver ,1973, 34,; . № 386, с. 210-216.
гг
BuM
W
a
Фиг.2 / /
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1990 |
|
SU1737693A1 |
| ИСПОЛНИТЕЛЬНЫЙ АГРЕГАТ ЭЛЕКТРОПРИВОДА | 2017 |
|
RU2656882C1 |
| МАШИНА ПОСТОЯННОГО ТОКА И.Г.СКИБИЦКОГО | 1994 |
|
RU2091966C1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД ПОВОРОТНОЙ ПЛАТФОРМЫ | 2017 |
|
RU2656999C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2019 |
|
RU2724926C1 |
| Электропривод | 1979 |
|
SU1023605A1 |
| МАШИНА ПОСТОЯННОГО ТОКА | 2010 |
|
RU2442271C1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Способ управления электроприводом постоянного тока дебалансного виброисточника и устройство для его осуществления | 1983 |
|
SU1144065A1 |
i
