(54) ПЕРИОДИЧЕСКИЙ ВЕРТИКАЛЬНО-ЗАМКНУТЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Периодический вертикально-замкнутый конвейер | 1974 |
|
SU524748A1 |
| Устройство для перезарядки цилиндрических вулканизаторов | 1969 |
|
SU438549A1 |
| Устройство для изготовления диафрагмы галетного элемента | 1976 |
|
SU574792A1 |
| Грузоведущий штанговый конвейер | 2002 |
|
RU2223904C1 |
| Спосб периодического вертикальнозамкнутого перемещения кареток | 1974 |
|
SU581034A1 |
| БЛОК ДЛЯ СЪЕМА И УКЛАДКИ ГРУЗОВ ЛИТЕЙНЫХ ФОРМ | 1990 |
|
RU2014950C1 |
| Поточная линия формирования колесных пар подвижного состава | 1972 |
|
SU490701A1 |
| ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1972 |
|
SU328038A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1364565A1 |
| ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КИРПИЧЕЙ | 1995 |
|
RU2054354C1 |
Изобретение относится к промышленному транспорту и применяется преимущественно для межоперационной транспортировки деталей при их обработке в поточном производстве и может быть использовано в различных обалстях техники, в частности в эле ментной промышленности для коммутации секции галетных батарей типа Рубин-1. Известен периодический вертикальнозамкнутый конвейер, включаюший верхний и нижний направляющие пути, приводную штангу с толкателями, тележки и амортизаторы. Направляющие пути выполнены из рельс с уклоном, величина которого определяется в зависимости от условий работы. Амортизаторы установлены на раме каждой тележки, а передача тележек с верхнего пути на нижний осуществляется с помощью вертикально перемещающегося стола 1. Недостаток указанного конвейера заключается в том, что применяемые нижние пути с малым наклоном не позволяют увеличить скорость перемещения кареток, что сказывается на производительности конвейера. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является периодический вертикально-замкнутый конвейер, включающий верхний и нижний направляющие пути, приводную штангу с толкателями, тележки, качающийся метатель на одном конце конвейера и амортизатор со стопорами тележек на другом конце 2. Недостаток указанного конвейера заключается в том, что данная конструкция требует большого расстояния между тележками на верхнем пути для возможности их перехода с нижнего пути на верхний, что ведет к увеличению шага штангового толкателя, а следовательно, и длины самого конвейера, в результате чего снижается его производительность. Целью изобретения является увеличение производительности конвейера и уменьшение его габаритов. Это достигается тем, что он снабжен закрепленными на верхнем пути съемника тележек и поворотной рамой с прижимными рычагами, на которой размещены стопоры тележек и амортизатор, выполненный из направляющей втулки, установленной
с возможностью перемещения относительно стопоров тележек, причем внутри направляющей втулки имеется подвижный стержень с пружиной, роликом и регулирующей гайкой.
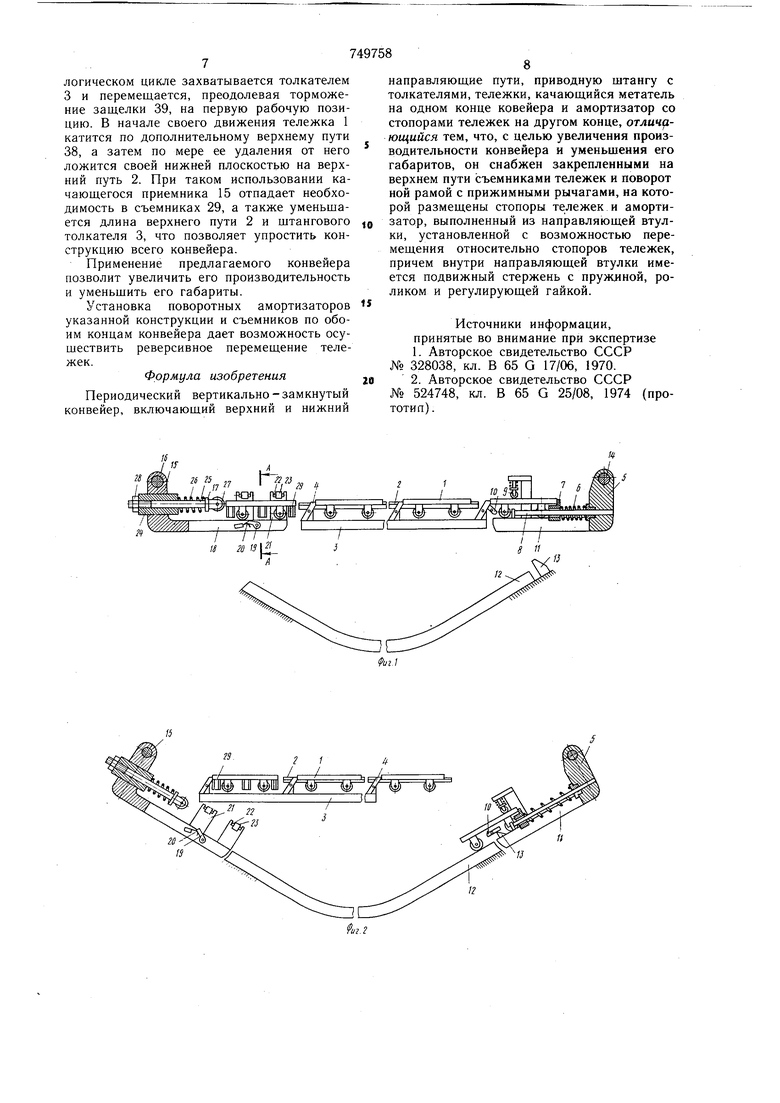
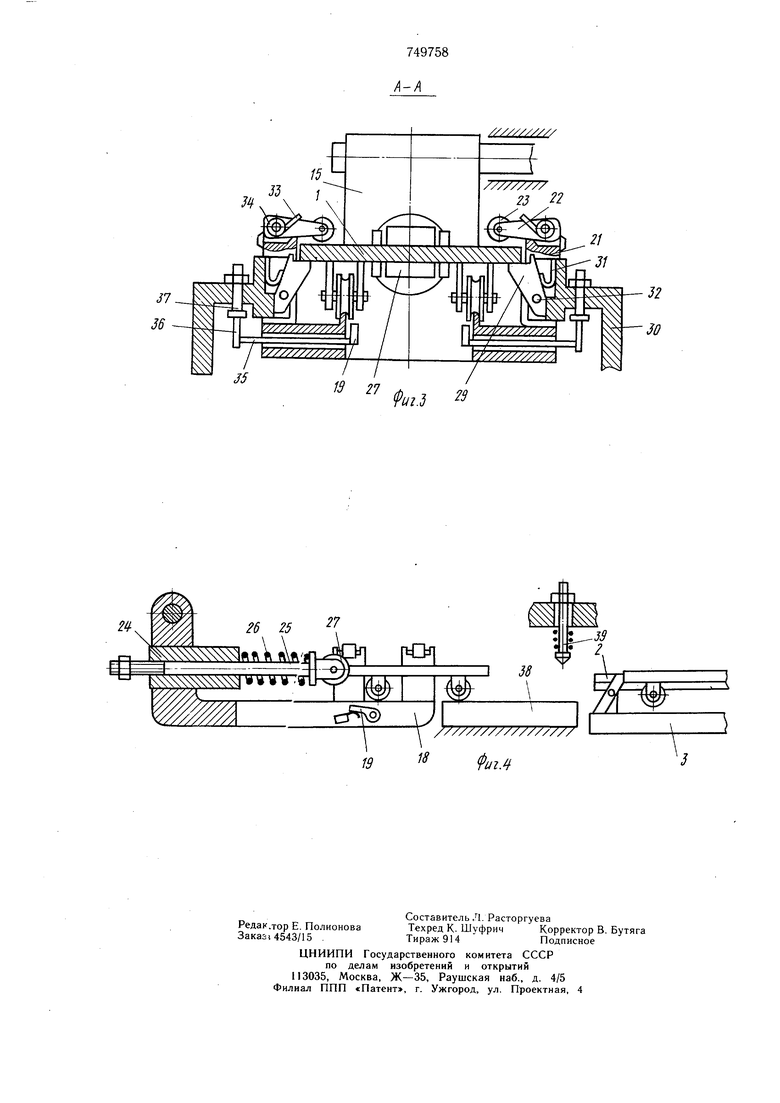
На фиг. 1 изображен предлагаемый конвейер, момент вкладывания тележки в метатель; на фиг. 2 - то же, момент подачи тележки в качающийся приемник; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - вариант применения качающегося приемника тележек.
Конвейер состоит из тележек 1, скользящих своей плоскостью по верхнему пути 2. Перемещение тележек 1 от позиции к позиции осуществляется с помощью штангового толкателя 3 с кулачками 4,расположенного вдоль продольной оси конвейера и совершающего возвратно-поступательное движение от привода (привод и кинематическая связь привода с механизмами конвейера условно не показань). В конце верхнего пути 2 конвейера расположен поворотный метатель 5, состоящий из аккумулирующего энергию щтаигового толкателя 3, пружины 6, втулки 7, перемещающейся по направляющей щтанге 8, удерживающих роликов 9 и фиксаторов 10. Для установки колес тележки 1 поворотный метатель 5 имеет направляющую опору 11. Фиксаторы 10 выполнены так, что свободно пропускают тележку 1 внутрь поворотного метателя 5, а для обратного выхода тележки необходимо их утопить, для чего на нижнем пути 12 установлены упоры 13. Поворот метателя 5 производится с помощью соединенного с ним вала 14. Поворотный метатель 5 предназначен для перевода тележек 1 с верхнего пути 2 на нижний путь 12 и для придания им ускорения для возврата в исходное положение.
Захват возвращающихся тележек 1 и перенос их с нижнего пути 12 на верхний путь 2 осуществляется качающим приемником 15, установленным в начале конвейера. Качающийся приемник 15 тележек 1 выполнен в виде жестко закрепленного на валу 16 регулируемого амортизатора 17 и установленного на поворотной раме 18 со стопорами 19, поджимаемыми пружинами 20 и направляющими ограничительными кронщтейнами 21 с установленными на них прижимными рычагами 22 с роликами 23. Регулируемый амортизатор 17 предназначен для гащения энергии тележки 1, приобретенной за счет поворотного метателя 5, а также для удержания тележки 1 в определенном положении при ее переносе с нижнего пути 12 на верхний путь 2. Регулируемый амортизатор 17 состоит из втулки 24, имеющей возможность перемещения с помощью резьбы в направлении тележки 1, в которой подвижно установлен стержень 25. На стержне 25 имеется пружина 26 и ролик 27. Усилие пружины 26 регулируется гайкой 28. В начале конвейера на верхнем
пути 2 закреплены съемники 29, предназначенные для удержания переведенной с нижнего пути 12 качающимся приемником 15 каретки 1 на верхнем пути 2 до подхода щтангового толкателя 3. Съемники 29 noстоянно отжимаются от основания 30 пружины 31. Они пропускают тележку 1 вверх, поворачиваясь на оси 32, а при опускании качающегося приемника 15 запирают ее, фиксируя на верхнем пути 2.
Ограничительные кронштейны 21 с установленными на них рычагами 22 и роликами 23 служат для удержания тележки 1 на качающемся приемнике 15 при перемещении ее с нижнего пути 12 на верхний путь 2, а также при остановке. Рычаг 22 находится в горизонтальном положении с помощью пружины кручения 33 и не позволяет колесам тележки 1 соскочить с поворотной рамы 18 качающегося приемника 15 как во время его перемещения, так и останова. Усилие пружины кручения 33 выбрано таким, что не позволяет рычагу 22 отклониться от горизонтального положения под воздействием каретки 1, но при более сильном воздействии на него рычаг 22 может поворачиваться относительно оси 34, отклоняя пружину кручения 33. Стопора 19, закрепленные на поворотной раме 18, служат для удержания тележек 1 на качающемся приемнике l5. Они могут пропустить тележку 1 только в сторону регулируемого амортизатора 17. Для утапливания 0 их и освобождения тележки 1 валики 35 стопоров имеют рычаги 36, взаимодействующие с упорами 37 установленных в основаниях 30 на верхнем пути 2 конвейера.
Работает конвейер следующим образом.
По окончании технологического цикла
на рабочих позициях штанговый толкатель 3 посредством своих кулачков 4 захватывает тележку 1 со съемников 29 и перемещает ее на позицию загрузки, загруженную тележку l на первую рабочую позицию, с первой рабочей позиции на следующую и т. д., а с последней рабочей позиции штанговый толкатель 3 вкладывает тележку 1 в поворотный метатель 5, сжимая пружину 6 за счет перемещения втулки 7 тележкой 1 по направляющей щтанге 8. Тележка 1 заходит в поворотный метатель 5, контактируя своими колесами с направляющими опорами 11 до tex пор, пока фиксаторы 10 не запрут тележку 1 в метатеJP ле и штанговый толкатель 3 не остановится. В это время к освободившимся от предыдущей тележки 1 съемником 29 поднимается качающийся приемник 15 с находящейся в нем следующей возвратившейся тележкой 1. Проходя съемники 29, он боковыми сторонами тележки 1 раздвигает их, сжимая пружины 31.. После того, как корпус тележки 1 поднимится чуть выше съемников 29, они возвращаются в исходное положение, перекрывая обратный путь тележки 1. Рычаги 36 взаимодействуют с упорами 37, валики 35 поворачиваются и утопляют стопора 19, освобождая тележку 1. Качающийся приемник 15 начинает обратное свое перемещение вниз, корпус тележки 1 своей нижней частью ложится на съемники 29, ролики 23 при дальнейшем опускании качающегося прнемника 15 касаются корпуса тележки и начинают поворачивать рычаги 22 относительно оси 34, отклоняя пружины кручения 33. Затем ролики 23, обкатываясь вокруг боковых сторон тележки 1, соскальзывают с нее и рычаги 22 вновь занимают свое первоначальное положение. Одновременно с опусканием качающегося приемника 15 поворотный метатель 5 также начинает свой наклон вниз к нижнему пути 12 под воздействием поворота вала 14. Наклон поворотного метателя 5 происходит до тех пор, пока направляющие опоры 11 не будут находится на одной линии с нижним путем 12. В этот момент поворотный метатель 5 останавливается, а упоры 13 утапливают фиксаторы 10. Освобожденная тележка 1 под действием пружины 6 втулкой 7 выстреливается на нижний путь 12 в сторону качающегося приемника 15. Удерживающие ролики 9, которые во время опускания и останова поворотного метателя 5 не давали возможность колесам тележки 1 соскочить с направляющих опор 11 в момент выстреливания, также удерживают тележку 1 от соскакивания на стыке нижнего пути 12 и направляющий опор 11. После отстреливания тележки 1 поворотный метатель 5 поднимается в исходное положение на верхнем пути 2, где щтанговый толкатель 3 по окончании технологического цикла на рабочих позициях вкладывает в него новую тележку 1, одновременно перемещая к позиции загрузки переведенную с нижнего пути 12 тележку 1, освобождая зону съемников 29.
Выпущенная метателем 5 тележка 1, пройдя по нижнему пути 12, входит в качающийся приемник 15, находящийся в наклонном положении с установленной на одном уровне с нижним путем 12 поворотной рамой 18. Контактируя с поворотной рамой 18, , тележка 1 колесами утапливает стопоры 19 и приходит к амортизатору 17, нажимает на ролик 27 и, сжимая пружину 26, гасит свою энергию. Стержень 25, возвращаясь в исходное положение; перемещает тележку 1 назад до стопора 19, занявщего после прохода колес тележки 1 под действием пружины 20 свое первоначальное положение. Втулка 24 амортизатора 17 установлена так, что когда тележка 1. при обратном перемещении касается своими колесами стопора 19, между роликом 27 .и корпусом тележки 1 имеется зазор 0,5-1 мм, т. е. амортизатор полностью поглощает энергию тележки 1.
Тележка 1 находится в качающемся приемнике 15 в зафиксированном положении: с одной стороны перемещение тележки 1 по раме 18 ограничивает стопор 19, с другой - ролик 27 с пружиной 26 амортизатора 17, от бокового смещения имеются направляющие ограничительные кронщтейны 21, а сверху от возможности схода колес тележки 1 с рамы 18, как во время гащения ее энергии, так и во время ее подъема
д качающимся приемником 15, установлены рычаги 22 с роликами 23. Как только толкатель 3 вложит тележку 1 в находящийся на верхнем пути 2 метатель 5, одновременно освободив зону съемников 29 от установленной в ней тележки 1, он перемещает ее на позицию загрузки. Качающийся приемник 15 поднимается, переводя тележку 1 с нижнего пути 12 на верхний путь 2, и цикл повторяется.
На конвейере может быть установлен и
использован качающийся приемник 15, который не полностью погащает энергию поступающей в него тележки 1, т. е. в момент фиксации тележки 1 в качающемся приемнике 15 ролик 27 находится в контакте с тележкой 1 и прижимает ее к стопору 19 с помощью пружины 26, происходит частичное аккумулирование энергии. Это достигается тем, что втулка 24 амортизатора 17 перемещается в-сторону стопора 19 так, чтобы расстояние между ро° ликом 27 и стопором 19 на качающемся приемнике 15 было меньще, чем расстояние на тележке 1 между точкой контакта ее с роликом 27 и точкой соприкосновения со стопором 19. Чем больще разность этих
J расстояний, тем больще будет аккумулировано энергии, причем разность расстояний не должна превышать максимальную величину сжатия пружины 26 в момент воздействия на нее тележки 1, иначе не произойдет фиксация ее стопорами 19.
о В момент подвода тележки 1 к верхнему пути 2 рама 18 качающегося приемника 15 занимает горизонтальное положение и устанавливается на одном уровне с дополнительным верхним путем 38, одновременно упоры 37 воздействуют на рыча5ги 36 и поворачивают стопоры 19, освобождая тележку 1, которая роликами 27 под действием пружины 26, выталкивается на дополнительный верхний путь 38. Дополнительный верхний путь 38 расположен
0 под позицией загрузки и представляет собой две направляющие планки, между которыми имеется свободное пространство для захода штангового толкателя 3 с кулачками 4. Качение тележки 1 осуществляется до защелки 39, предназначенной для фиксации
5 тележки, в которой для этого имеется гнездо, и установленной в конце дополнительного верхнего пути 38. После выталкивания тележки 1 качающийся приемник 15 опускается, а тележка 1 при дальнейщем техно-:логическом цикле захватывается толкателем 3 и перемещается, преодолевая торможение защелки 39, на первую рабочую позицию. В начале своего движения тележка 1 катится по дополнительному верхнему пути 38, а затем по мере ее удаления от него ложится своей нижней плоскостью на верхний путь 2. При таком использовании качающегося приемника 15 отпадает необходимость в съемниках 29, а также уменьщается длина верхнего пути 2 и щтангового толкателя 3, что позволяет упростить конструкцию всего конвейера. Применение предлагаемого конвейера позволит увеличить его производительность и уменьщить его габариты. Установка поворотных амортизаторов указанной конструкции и съемников по обоим концам конвейера дает возможность осуществить реверсивное перемещение тележек. Формула изобретения Периодический вертикально - замкнутый конвейер, включающий верхний и нижний 7 направляющие пути, приводную штангу с толкателями, тележки, качающийся метатель на одном конце ковейера и амортизатор со стопорами тележек на другом конце, отличд,ющийся тем, что, с целью увеличения производительности конвейера и уменьшения его габаритов, он снабжен закрепленными на верхнем пути съемниками тележек и поворот ной рамой с прижимными рычагами, на которой размещены стопоры тележек и амортизатор, выполненный из направляющей втулки, установленной с возможностью перемещения относительно стопоров тележек, причем внутри направляющей втулки имеется подвижный стержень с пружиной, роликом и регулирующей гайкой. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 328038, кл. В 65 G 17/06, 1970. 2. Авторское свидетельство СССР № 524748, кл. В 65 G 25/08, 1974 (прототип). У/ - //////77Л1 1д П /1-Л иг. 3 ///////////
