(54) ПОЗИЦИОННЫЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный привод | 1978 |
|
SU750145A1 |
| Эластовискозиметр | 1979 |
|
SU993102A2 |
| Эластовискозиметр | 1979 |
|
SU828020A1 |
| Вибрационный эластовискозиметр | 1976 |
|
SU567119A1 |
| Демпфируемый позиционный привод | 1979 |
|
SU853203A1 |
| Позиционный следящий привод | 1986 |
|
SU1399522A1 |
| Модульный привод поворота | 1978 |
|
SU768632A1 |
| Позиционный пневматический привод | 1988 |
|
SU1508015A1 |
| Эластовискозиметр | 1980 |
|
SU890151A1 |
| Вентильный электродвигатель | 1982 |
|
SU1095322A1 |
1
Изобретение относится к машиностроению, а именно к электрогидравлическим приводам и может быть использовано, например, в металлорежущих станках, в сборочных, обрабатывающих и других автоматах с программным управлением.
Известен позиционный привод, содержащий демпфирующее устройство, выполненное с возможностью взанмодействия со штоком исполнительного гидропневмоцилнндра и датчик обратной связи 1.
Недостатком известного устройства является отсутствие возможности изменять закон перемещения щтока исполнительного гидропневмоцилиндра в процессе демпфирования, что искажает требуемые динамические характеристики привода при изменении нагрузок на выходе привода, а кроме того, известное устройство имеет сложную конструкцию вследствие наличия дополнительных связующих звеньев между щтоком и демпфирующим устройством.
Цель изобретения - улучшение динамических характеристик и упрощение конструкции привода.
Поставленная цель достигается тем, что демпфирующее устройство выполнено в виде
управляемого от датчика обратной связи порошкового тормоза, якорь которого снабжен равномерно расположенными по длине кольцевыми выступами и жестко связан со штоком исполнительного гидропневмоцилнндра.
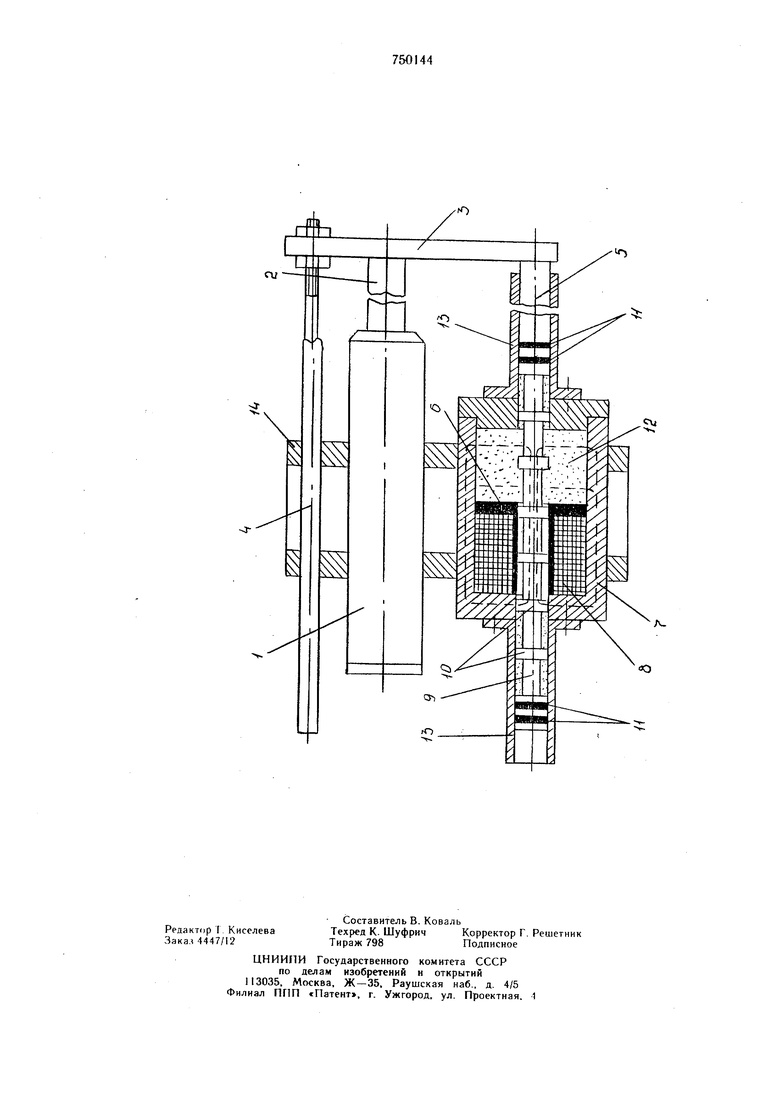
На чертеже представлена принципиальная схема привода с разрезом по демпфирующему устройству.
Позиционный привод содержит исполнительный гидропневмоцилиндр 1, выходной щток 2 которого посредством планки 3 связан с датчиком 4 обратной связи (на чертеже представлено упрощенное изображение) и стержнем 5, демпфирующее устройство, выполненное в виде порощкового тормоза 6. 5 Порощковый тормоз 6 включает статор 7, апектромагнитную катущку 8, якорь 9. Якорь 9 снабжен равномерно расположенными по длине кольцевыми выступами 10, а на концах его установлены уплотнения 11, и JQ жестко связан со стержнем 5. Внутренняя полость 12 порощкового тормоза 6 заполнена смесью ферромагнитного порошка с жидким наполнителем. Кроме того, со статором 7 связаны втулки 13. служащие вместе с уплотнениями I для предотвращения вытекания смеси из полости 12 и опора 14. Привод работает следующим образом. В блок управления (на чертеже не показан) программируется координата познциоиирования и момент начала демпфирования в зависимости от величины перемещения выходного штока 2, нагрузки на нем и давления рабочей жидкости на входе в привод. При подаче рабочей жидкости в исполнительный гидропневмоцилиндр, шток 2 последнего перемещается, например, вправо по чертежу, увлекая за собой датчик 4 обратной связи, стержень 5 и якорь 9, свободно перемещающийся внутри порошкового тормоза 6. При совпадении значения заданной координаты начала демпфирования с текущим значением, поступающим с датчика 4 обратной связи, последний формирует управляющий сигнал на электромагнитную катушку 8 порошкового тормоза 6. Возникаюaiee при этом магнитное поле замыкается через смесь, заполняющую внутреннюю полость 12, вызывает магнитное сцепление частичек ферромагнитного порошка, т. е. увеличение плотности смеси. Взаимодействуя с кольцевыми выступами 10, ферромагнитной порошок препятствует свободному перемещению якоря 9 относительно статора 7, снижая скорость его перемещения, и осуществляется демпфирование всего привода в целом. С увеличением тока в электромагнитной катущке 8 возрастает сопротивление ферромагнитного порошка, препятствующего перемещению стержня 5 и, следовательно, выходного штока 2 исполнительного гидропневмодвигателя 1. Позиционный привод относительно прост в конструктивном отношении, технологичен в изготовлении, позволяет изменять в широких пределах параметры демпфирования в зависимости от скорости перемещения выходного штока, нагрузки на нем и давления на входе. Применение позиционного управляемого демпфирования в сочетании с предложенной конструкцией демпфера позволяет устранить инерционные перебеги щтока в конце хода, получать требуемые динамические характеристики и существенно расширить за счет этого технологические возможности привода, давая возможность применять его для выполнения высокоточных технологических процессов, таких, например, как сборка микромодульных схем. Появляется возможность использовать данный привод в самонастраивающихся технологических системах, в которых заданы лишь конечные параметры производственного процесса и в зависимости от условий их реализации автоматически изыскиваются и поддерживаются заданные режимы работы технологического оборудования. Формула изобретения Позиционный привод, содержащий демпфирующее устройство, выполненное с возможностью взаимодействия со штокам исполнительного гидропневмоцилиндра и датчик обратной связи, отличающийся тем, что, с целью у 1учшения динамических характеристик и упрощения конструкции, де.мпфирующее устройство выполнено в виде управляемого от датчика обратной связи порошкового тормоза, якорь которого снабжен равномерно расположенными по длине кольцевыми выступами и жестко связан со щтоком исполнительного гидропневмоцилиндра. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 595703, кл. F 15 В 9/07, 1976.
cv
О
.
