(54) МОДУЛЬНЫЙ ПРИВОД ПОВОРОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| Позиционный привод | 1978 |
|
SU750144A1 |
| Модульный привод вращения | 1978 |
|
SU745671A1 |
| ОПОРНЫЙ СЕГМЕНТНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2016 |
|
RU2619408C1 |
| Моментный позиционный пневмогидропривод | 1987 |
|
SU1455062A1 |
| ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2289186C2 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1978 |
|
SU1839912A1 |
| ШИБЕРНЫЙ ПОВОРОТНЫЙ ПНЕВМО (ГИДРО) ДВИГАТЕЛЬ С РАЗДЕЛЬНЫМ КОРПУСОМ И СПОСОБ ЕГО СБОРКИ | 2014 |
|
RU2561350C2 |
| ПОГРУЖНАЯ БЕСШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2018 |
|
RU2695163C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |

Изобретение относится к машиностроению, в частности к созданию универсальных промышленных роботов.
, Известен модульный привод поворота мавипулятора, содержащий смонтированные друг над другой в разъемном корпусе , мр,ментн.ь1е.. силовьте , цилиндры, выходные .валы коррых- кинематически связайь друг,. с друпомР. - :. Недостатком известного привода является нестабильность динамических характер-истак. V
Целью изобретения является улучшение динамических характеристик привода ма,нипулятора. , .
. Цельдостигается тем, что привод снаб-, Жен демпфирующим устройством, выпол. ненным ввиде размеш;енной внутри разъ-. емного корпуса катушки элё ктромагнит;а и ротора, установленного на выходном валу 1, крайнего СИ.ПОВОГО цилинАра и имеюшепо кольцевые пазы, в которых расположены вкладыши, жестко закрепленные в корпусе, причем зазоры между ротором, корпу сом и вкладышами заполнены смесью ферромагнитного порошка с наполнителем, который является MauiHHHoe масло.
а датчи1| обратной связи расположен на выходном валу силового цилиндра.
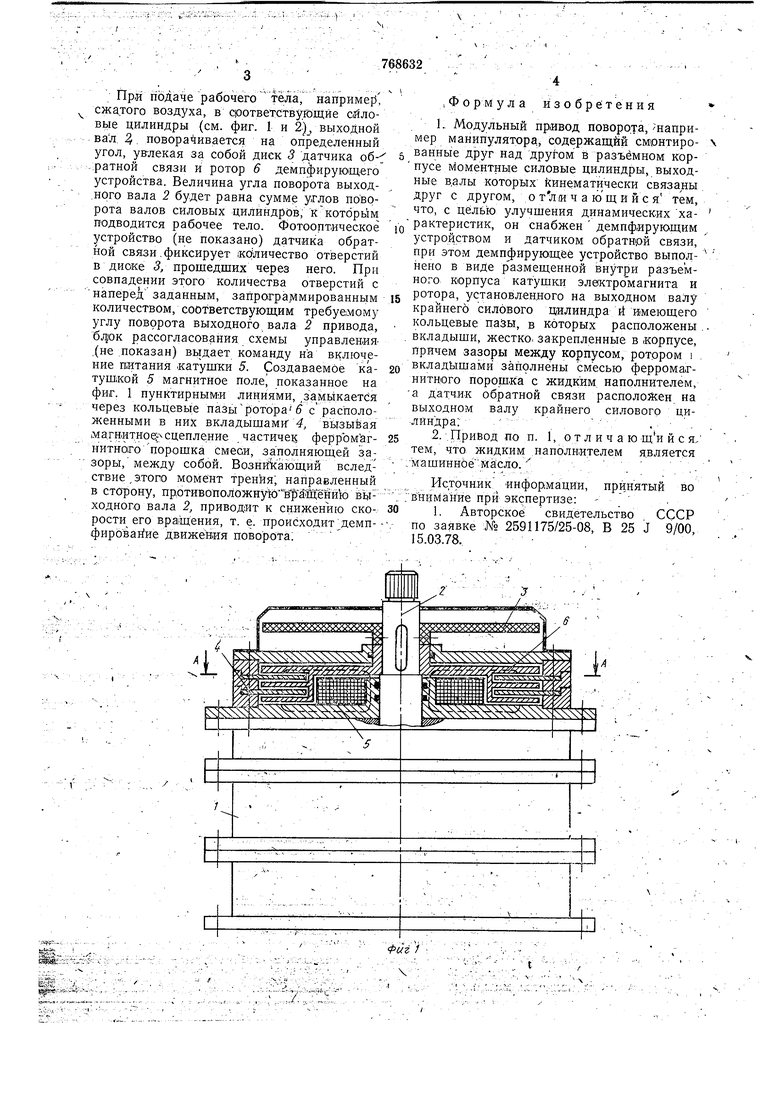
На фиг. 1 показан общий вид привода
5 манипулятора с разрезом тто демпфируюш.ему устройству; на фи;г. 2 - разрез А-А фиг. 1.
- Привод содержит смонтированные . в разъемном корпусе / моментные силовые
10 цилиндры (не показаны), выходные, валы которых кинематичебки связаны друг с другом. На выходнО(М валу 2 крайнего силовогоцидиндр а смонтирован на шпонке диск 3, датчика обратной связи. Демпфирующее
15 устройство содержит неподвижно установ, ленные в корпусе сегментные вкладыши 4,
катущку 5 соленоидного типа и ротор 6,
установленный спомонхью шпоики нава-,
лу 2. Ротор 6 имеет на наружной поверхности ряд кольцевых пазов, в которых ,с зазором размещены сегментные вкладыши..
Внутренняя полость, демпфирук щего устрой.ства, образованная между ротором 5, корпусом 1 с вкладь1шами 4, заполнена
.25 смесью ферромагнитного порошка с жид-ким наполнителем, например машинным маслом.
Модульный привод lioBopOTa работает 30 следующим образом. При подаче рабочего тёла, например сжатого воздуха, в срответствуйщйе силовые цилиндры (см. фиг. 1 и 2), выходной вал . поворачивается на определенный угол, ув-лекая за собой диск 3 датчика об-f ратной связи и ротор 6 демпфирующего устройства. Величина угла поворота выход.ного вала 2 будет равна сумме углов поворота валов силовых цилиндров, К которым подводится рабочее тело. Фотооптическое устройство (не показано) датчика обратной связи.фиксирует количество от1верстий в диске 3, прошедших через него. При совпадении этого количества отверстий с наперед заданным, запрограммированным количеством, соответствующим требуемому углу поворота выходного вала 2 привода, блок рассогласования схемы управления,(не показан) выдает команду на включение питания катушки 5. Создаваемое катушжой 5 магнитное поле показанное на фиг. 1 пунктирными линиями, за мыкается через кольцевые пазыротора5 срасположенными в них вкладышами 4, вызывая магнитное; сцепление .частиче ферромагнитного порошка смеси, заполняюшей зэ; зоры, между собой. Возникающий вслед.ствие , этого момент трения; направленный в стотэону, противоположну1о вращенйю выходного вала 2, приводит к снижению скорости его вращения, т. е. происходит демпфирование движения поворота: , Ф о р м ула изобретения 1.Модульный привод поворота,Например манипулятора., содержащий смюнтированные друг над другом в разъёмном корпусе моментные силовые цилиндры, выходные в.алы которых йинематически связаны друг с другом, отлмчающийся тем, что, с целью улучшения динамических характеристик, он снабжен демпфирующим устройством и датчиком обратврй связи, при этом демпфирую1щеё устройство выполнено в виде размещенной внутри разъемного корпуса катушки электромагнита и ротора, установлендого на выходном валу крайнего силового цилиндра и ИМеюшего кольцевые паЗы, в которых расположены . вкладыши, жестко, закрепленные в корпусе, причем зазоры между корпусом, ротором i вкладЬтшами заполнены смесью ферромагнитного порош.ка с жидким наполнителем, а датчик обратной связи расположен на выходном валу крайнего силового цилинДра; . .. 2.Привод по п. 1, отличаю щи и с я/ тем, что жидким .наполнителем является машинное масло., .. Источник информации, принятый во внимание при экспертизе: 1. Авторское свидетельство СССР по заявке № 2591175/25-08, В 25 J 9/00, 15.03.78.
Ейе-.:А.
N..
o
