(54) ПОЗИЦИОННЫЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный привод | 1978 |
|
SU750144A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН ДЛЯ ГИДРОУПРАВЛЯЕМОЙ ТОПЛИВНОЙ ФОРСУНКИ | 2011 |
|
RU2541483C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПРЯДЕЙ КАНАТА | 2003 |
|
RU2233361C1 |
| Позиционный следящий привод | 1986 |
|
SU1399522A1 |
| Демпфируемый позиционный привод | 1979 |
|
SU853203A1 |
| Устройство для принудительного изгиба прокатных валков | 1984 |
|
SU1202654A1 |
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| Гидропривод стрелы погрузчика | 2021 |
|
RU2769209C1 |
| Электромагнит | 1980 |
|
SU951421A2 |
| Датчик крена крутосклонной машины | 1989 |
|
SU1703499A1 |
1
Изобретение относится к автоматическому управлению машинами и может быть применено в системах программного управления различным технологическим оборудованием, в частности металлорежупди.ми станками, роботами-манипуляторами и т. д.
Известен позиционный привод, содержащий демпфирующее- устройство, связанное через деформируемый и недеформируемый элементы со штоком исполнительного гидропневмодвигателя, приводное устройство, выполненное в виде управляемого от датчика обратной связи электромагнита 1.
Недостатком известного привода является то, что в качестве демпфирующего устройства используются механические пружины с нерегулируемой жесткостью, а в качестве связующего элемента - гидромуфта, что в значительной мере влияет на динамические характеристики, а кроме того, при изменении нагрузок невозможно обеспечить заданный закон торможения, что ограничивает технологические возможности привода.
Цель изобретения - улучшение динамических характеристик и расширение технологических возможностей привода.
Указанная 1ель достигается тем, что демпфирующее устройство выполнено в виде зеркально расположенных относительно недеформируемого элемента сильфонов, полости которых сообщены между собой через
, установленный в недеформируемом элементе регулируемый гндролроссель, а статор и якорь электромагнита связаны соответственно с недеформнруемым и деформируемым эле.ментами.
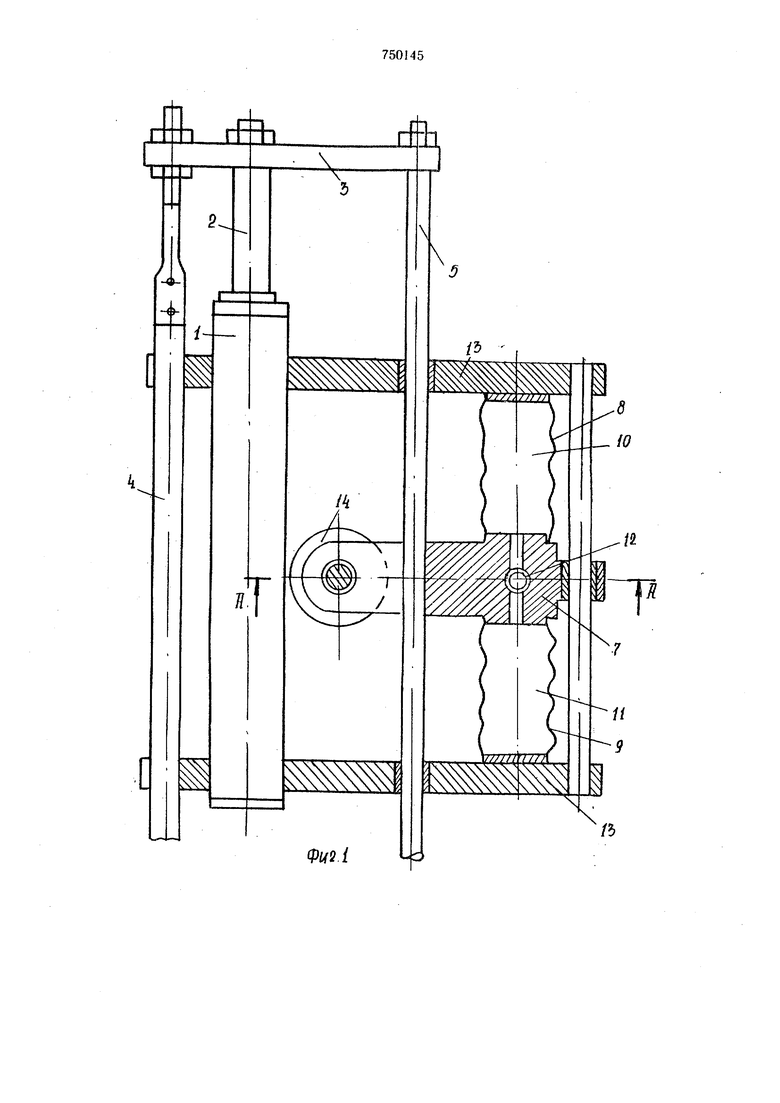
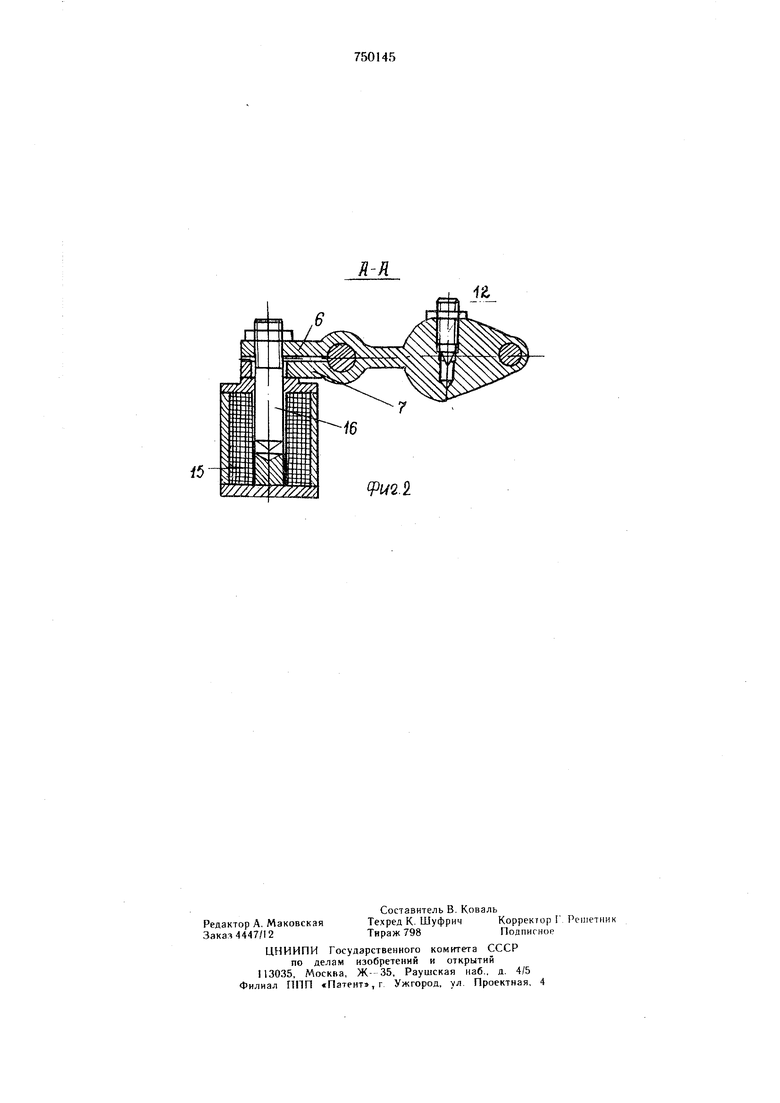
На фиг. 1 представлен позиционный привод, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Позиционный привод содержит исполнительный гндропневмодвигатель 1, выходной шток 2 которого посредством планки 3 связан с датчиком 4 обратной связи (на
15 чертеже показана кодовая линейка) и штангой 5, связанной через деформируемый 6 и недеформируемый 7 элементы с демпфирующим устройством, выполненным в виде зеркально расположенных относительно
20 недеформнруемого элемента 7 сильфонов 8 и 9, полости 10 и 11 которых сообщены между собой через регулируемый гидродроссель 12. Регулируемый гидродроссель 12 установлен в недеформируемом элементе 7,
а сильфоны 8 и 9 - в корпусе 13. Кроме того, устройство включает управляемое от датчика 4 обратной связи приводно ; устройство, выполненное в виде электромагнита 14, статор 15 и якорь 16 которого связаны соответственно с недеформируемым 7 и деформируемым 6 элементами. Датчик 4 обратной связи имеет дискретность, не превышающую минимально необходимую величину тормозного пути.
Позиционный привод работает следующим образом.
В блоке управления (на чертеже не показан) программируются координаты позиционирования и моменты начала демпфирования, в зависимости от величины перемещения и нагрузки на выходном штоке 2. При перемещении выходного щтока 2 исполнительного гидропневмодвигателя 1, например, вверх по чертежу вместе с ним перемещается датчик 4 обратной связи и щтанга 5, свободно перемещающаяся в зазоре между деформируемым 6 и недеформируемым 7 элементами. При совпадении значения заданной коордннаты начала демпфирования со значением координаты, поступивщей с датчика 4 обратной связи, с последнего формируется управляющий сигнал на запитывание . электромагнита 14, якорь 6 которого перемещается в статоре 15 и осуществляет обжим щтакги 5 деформируемым элементом 6. Продолжая перемещаться, щтанга 5 увлекает за собой недеформируемый элемент 7, вследствие чего происходит сжатие сильфона 8 и перетечка рабочей жидкости из полости 10 через регулируемый гидродроссель 12 в полость 11 сильфона 9. Скорость истечения рабочей жидкости зависит от настройки регулируемого гндродросселя 12 и определяет скорость перемещения выходного штока 2 исполнительного гидропневмодвигателя 1 в стадии его торможения.
При перемещении выходного щтока 2 (например, вниз по чертежу) в определенный момент времени наблюдается срабатывание электромагнита и последующее сжатие сильфона 9 с перетечкой рабочей жидкости из полости I в полость 10.
После окончания демпфирования происходит обесточивание электромагнита 14 и освобождение деформируемого элемента 6,
при этом связь штанги 5 с недеформируемым элементом 7 нарушается. Демпфирующее устройство возвращается в исходное положение за счет энергии упругих сил деформации, накопленной в оболочках сильфона 8 или 9.
0 Применение управляемого демпфирования позволяет устранить инерционные перебои штока в конце хода, получить требуемые динамические характеристики и обеспчить закон перемещения выходного штока, существенно расширяя за счет этого технологические возможности привода и давая возможность применять его для выполнения высокоточных технологических процессов, таких, например, как сборка микромодульных схем.
Формула изобретения
Позиционный привод, содержащий демпфирующее устройство, связанное через деформируемый и недеформируемый элементы со штокОм исполнительного гидропневмоДБИгателя, приводное устройство, выполненное в виде управляемого от датчика обратной связи электромагнита, отличающийся тем, что, с целью улучшения динамических
0 характеристик и расширения технологических возможностей, демпфирующее устройство выполнено в виде зеркально расположенных относительно р{едеформируемого элемента сильфонов, полости которых сообщены между собой через установленный в недеформируемом элементе регулируемый гидродроссель, а статор и якорь электромагнита связаны соответственно с недеформируемым и деформируемым элементами. Источники информации,
принятые во внимание при экспертизе
rrti
