(54) OICTEMA УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКЯМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электрогидравлическим манипулятором | 1976 |
|
SU640841A1 |
| Система управления электрогидравлическими манипуляторами | 1977 |
|
SU750425A1 |
| Следящий гидропривод дроссельного регулирования | 1974 |
|
SU585320A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2162551C2 |
| Система управления электрогидравлическим манипулятором | 1976 |
|
SU596432A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2836312C1 |
| Устройство для управления пылесисте-МОй C шАРОВыМи бАРАбАННыМи МЕльНицАМи | 1979 |
|
SU841686A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2002 |
|
RU2209967C1 |
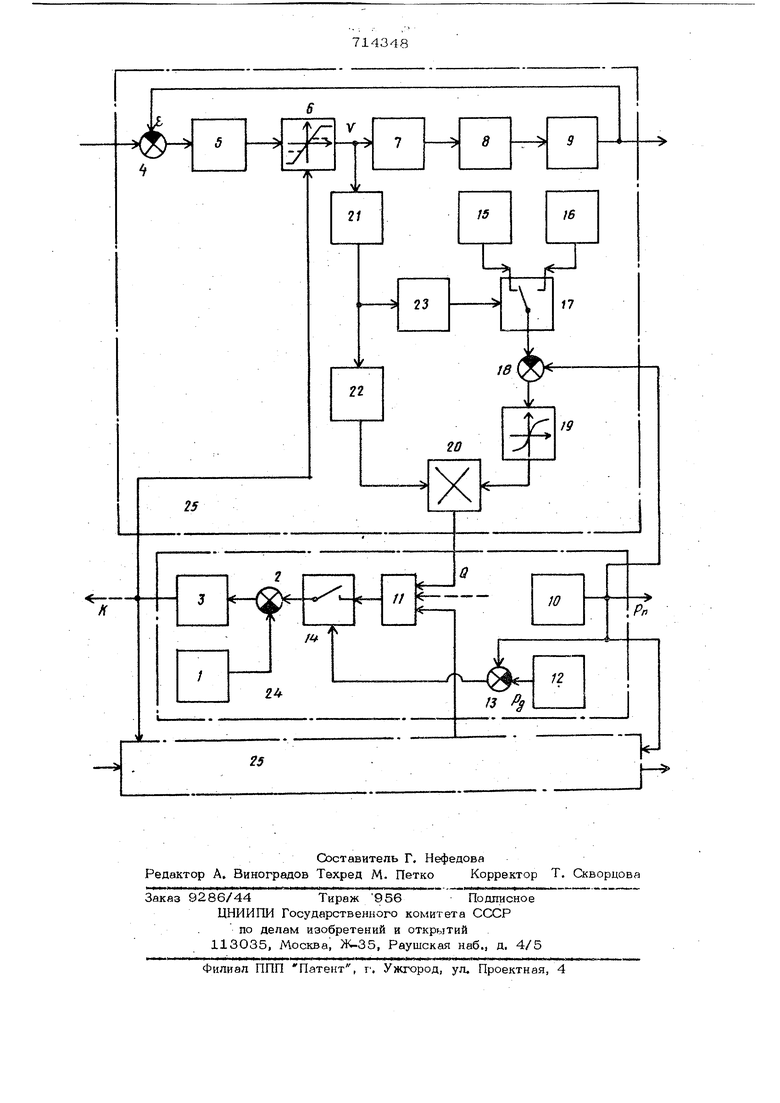
Изобретение относится к области мани пуляторостроения и может быть использовано при создании электрогидравлических манипуляторов, работающих от одного источника питания ограниченной мощности. Известна система управления электретгидравлическим манипулятором содержащая покаждой регулируемой координате гидродвигаталь, золотниковый гидрораспределитель с электрогидравлическим управлением, датчик положения задающего органа, датчик положения исполяителъяого органа, сумматор и усилитель ll. Однако в этой системе не исключены функциональные отказы.приводов, вызван- ньте значительным падением давления патания при перегрузке источника энерЪии. Наиболее близким по технической сущности к данному изобретению является система, содержащая нсследовательно сое- диненные первый источник эталонного сигнала, первый сумматор и первый пороговый элемент, и по каждой регулируемой координате последовательно соединенные второй сумматор, усилитель управляемый органичитель, золотниковый гидрораспрё- делитель, гидродвигатель и датчик обратной связи, выход которого подключен ко второму входу второго сумматора, причем выход первого порогового элемента соеди нен со вторым входом управляемьтх ограничителей 2, Однако для этой системы характерны большие амплитуды пульсаций давления в гвдравлических элементах и интенсивные колебания охвата манипулятора, возникающие низкого бьгстродействия датчика расхода и приводящие к повышенному износу гидроэлементов и ухудшению условий работы человека - оператора, Цель изобретения - повышение надежности, улучшение эксплуатационных характеристик системы. Это достигается тем, что система содержит первый датчик Дгзвления, третий сумматор, последовательно соединенные второй источник эталонного сигнала, четвертый сумматор и первый ключ, и по каждои регулируемой координате второй датчик давления, второй пороговый элемент, последовательно соединенные третий датчик давления, второй ключ, пятый сумматор, функциональный преобразователь и блок умножения, и последовательно соединенные корректирующее устройство и блок выделения модуля, выход которого подключен ко второму входу блока умножения. Выход второго датчика давления подключен ко второму входу второго ключа, тре тий вход которого через второй пороговый элемент соединен с выходом корректирующего устройства, вход которого подключен к выходу управляемого ограничителя, выход первого датчика давления соединен со вторым входом четвертого сумматора и со вторыми входами пятых сумматоров, выходы блоков умножения подключен к со ответствукщим входу третьего сумматора, выход которого подключен ко второму вхо ду первого ключа, выход которого соеди- иен со вторым входом первого сумматора На фигуре представлена функциональная схема системы. Система содержит: 1 - первый источник эталонногнэ сигнала, 2 - первый сумматор, 3 - первый пороговый элемент, 4 - второй сумматор, 5 - усилитель, 6 управляемый ограничитель, 7 - гидрораспределитель, 8 - гидродвигатель, 9 - дат чик обратной связи, Ю - первый датчик давления, 11 - третий сумматор, 12 второй источник эталонного сигнала, 13четвертый сумматор, 14 - первый ключ, 15 - второй датчик давления, 16 - третий датчик давления, 17 - второй ключ, 18 - пятый сумматор, 19 - функциональный преобразователь, 2О - блок умножения, 21 - корректирующее устройство, 22 - блок выделения модуля, 23 - второ пороговый элемент, 24 - общее командное устройство, 25 - следящие электрогидравлаческие привода. При этом К сигнал, переключения. М- входной сигнал гидрораспределителя 7, . - сигнал ошибки, Q - сигнал расхода, потребляемого одним приводом, Q YY1 сигнал допустимо го уровня потребляемого расхода, п сигнал давления питания, Р - сигнал до пустимого давления. Система управления электрогидравличе ким манипулятором работает следукацим образом. До тех пор, пока не исчерпан запас энергии, запасенный в гидроаккумуляторе и давление питания не упало ниже допустимой величины, сигнал Рп превышает сигнал PA д. Конакты первого ключа 14 разомкнуты, поэтому выходной сигнал треэтьего сумматора 11 не поступает на вход первого сумматора 2, и но выходе первого порогового элемента 3 отсутствует, сигнал переключения К, прнводшдий к переключению уровня ограничения управляемого ограничителя 6. При этих условиях следящие приводы работают обычным образом. Так же приводы работают и в том случае, когда сигнал Р, становится меньше РЛ,НО сумма сигналов Q. которая несет информацию о -суммарном потребляемом расходе, оказывается меньше сигнала Р.При этом расход, создаваемый насосом источника питанкя, превышает суммарный потребляемый расход, и запасы энергии в гидроаккумуляторе пополняются. Если же при Pf- Рд сумма сигналов Q окажется больше сигнала Оум, то первый порог вый элемент 3 выдает сигнал К переключения уровней ограничения управляемых ограничителей 6 во всех следящих приводах системы управления. Это вызывает ограничение входных сигналов V гидрораспределителей У с электрогидравлическим управпекием и уменьшетче расходов, потребляемых отдельными приводами, а следовательно, и суммарного потребляемого расхода, что препятствует падению давления питания. Как только сумма сигналов Q станет меньше Q, восстанавливается прежняя величина сигнала , Колебания сигналов V прекратятся, когда в результате отработки сигналов ошибок приводов б суммарный потребляемый расход станет и будет оставаться меньше допустимого уровня. Вычисление сигнала Q производится в соответствии с зависи-, мостью f Q , („-pTl Slgf где Z - смещение золотника; P, и P2 давления в полостях гидрораспределителя; Pj, - давление питания; с| постоянный функциональный множитель, определяемый значениями параметров гидрораспределителя. Функциональный преобразователь 19 воспроизводит зависимость f--/WSigh X, где X. - входной сигнал блока 19, а f выходной сигнал блока 14. Корре1стирующее устройство 21 представляет собой электрическую цепь, являющуюся упрощенной моделью гидрорасп еделителя 7 с электрогидравлическим управлением и опись1ваемую,например, апериодическим звеном. Значение выходного сигнала блока 21- с до статочной точностью пропорнионяльно ана чению смещения золотника. При появлении на выходе блока 21 сигнала одного знака второй пороговый элемент Zci выдает сиг .кал, при котором вторюй ключ 17 подклю чает к своему выходу сигнЪл первого датчика давления 15, а при появлении сигнала другогчэ знака - подключает сигнал второго датчика давления 16. После прохождения этого Сигнала через пятый сумматор 18 и функ циональный преобразователь 19 образуется сигнел, гфопорционельный либо величи -(VV 5igrH(,), ,g ,„„-е ijPr,-P2si (W- уменьшения 20 этот сигнал перемножается с модулем выходного сигнпла корректирующего устройства 21 и образует сигаал расхода Q , потребляемого одним приводомо Соответствукишй выбор типа датчиков давления 10, 15 и 16 и параметров корректирующего устройства 21 обеспечивает выработку сигнала Q со эна- чптель«о большим быстродействием, чем может быть достигнуто при использовании датчиков расхода. Поэтому в системе возникают колебания сигналов V с высокими частотами, которые практически полностью отфильтровываются СИЛОЕЬК-ЛИ частями приводов. Применение иаобретенЕЯ позволяет исключить колебания cxa&i-a манипулятора, что позволит ПОВЫСИТЬ проивводительность труда ориентировочно на 1О-20%. Формула изобретения Система управления злектрогидравли- ческим манипулятором, содержащая последовательно соединенные первый источник эталонного сигнала, первый сумматор и первый пороговый элемент, и по каждой регулируемой координате последовательно 7 48 соединенные второй сумматор, усилитель, управляемый огран11чит0ль, (зряспроде литель, гндродвигптель и датчик обратной связи, выход которого подключен ко второму входу второго суммпторя, причем выход первого порогового элемента соединен со вторыми входами управляемых ограничителей, отличают аяся тем, что, с целью повышения надежности системы, она содержит первый датчик давления, третий сумматор, последовательно соединенные второй источник эталонного с гнала, четвертый сумматор и первый ключ, и по каждой регулируемой координате второй датчик давления, второй пороговый элемент, последовательно соединенные третий датчик давления, второй ключ, пятый сумматор футснионалытый преобразователь и блок умножения, и последовательно соединенные корректйрукяцее устройство и блок выделения модуля, выход которого подключен ко второму входу блока умножения, вмход второго датчика давления подключен ко второму входу второго ключа, третий вход которого через второй пороговьгй элемент соединен с выходом корректируюtoeix) устройства, вход которого подключен к выходу управляемого ограничителя, выход первого датчика давления соединен со вторым входом четвертого сумматора и со вторыми входами пятьтх сумматоров, выходы блоков умножения подключены к соответствующим входам третьего сумматора, выход которого подключен ко второму входу первого ключа, выход которого соединен со вторьтм входом первого сумматора. Источники информации, принятьте во внимание при экспертизе 1.Жавнер В. Л., Крамской Э. И. Погрузочные манипуляторы, Машиностроение, Л,, 1975, с. 26-27.2 2,Заявка М 2364258/25-24, МКИ В 25 J 13/00, 1976, по которой щтнято решение о выдаче авторского свидеельства (прототип).
