датч1{ка эталонного сигнала подключен ко второму входу второго сумматора.
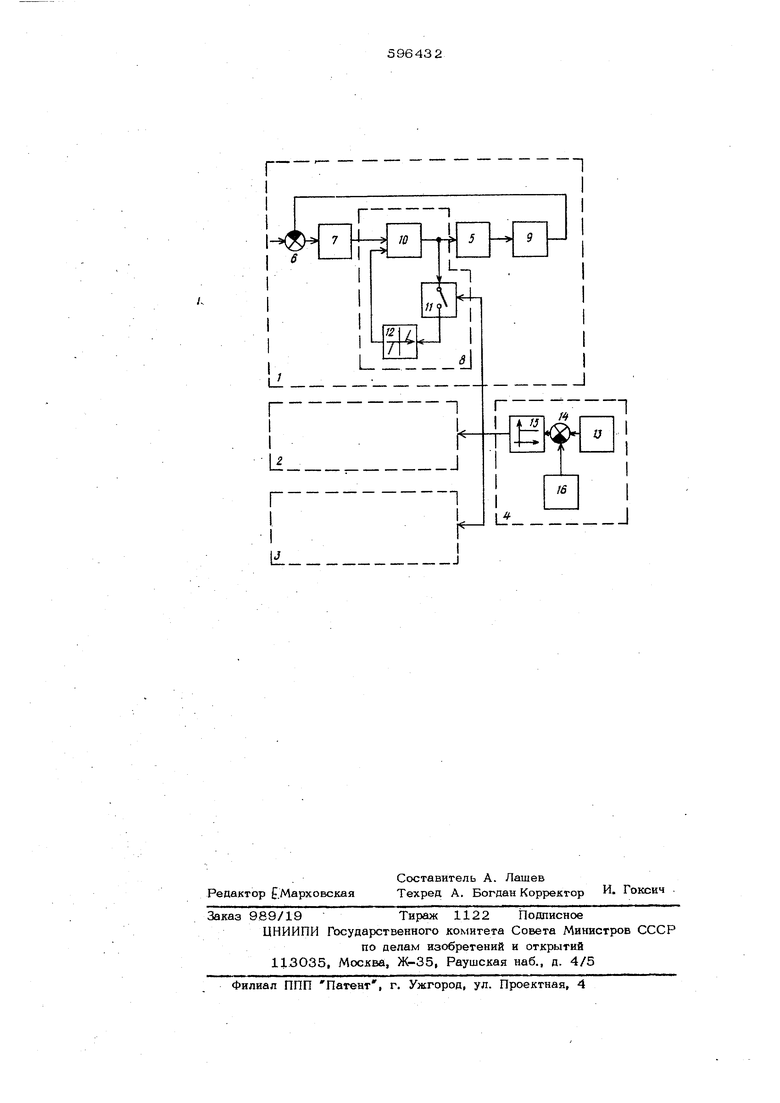
На чертеже поедстаБлена . функциональная схема системы управления электрогидралическим манипулятором,
Система содержит приводы и команное устройство 4 управления системой этих npiiBoaoB, Каждый следующий пр1тод состоит из гидропривода. 5, сумматора 6j усилителя 7, ограничителя 8 управляющего сиг- нала V и датчика обратной связи 9,, Управляемый ограничитель 8 состоит из вспомогательного усилителя 10, охваченного отрицательной обратной связью, в которую входят контакты элемента включения 11 и нелинейный элемент типа зоны нечувствительности 12, Команш ое устройство 4 состоит из последовательно соединенных датчнка 13 суммарного расхода рабочей жидкости j Второго сумматора 14 и пороговог ycIpoECTBa 15 и из датчика эталонного сигнала 16, подключенног- о своим выходом ко Второму входу второго сумматора 14,
Система управления электрогидравличес- КИМ манипулятором работает следующим образома
Если сигнал Q, датчика 13 суммарного расхода превысит, сигнал Отдатчика эталонного сигнала 16, то на выходе второго сумматора 14 появляе1х;я положителыгый
сигнал, срабатывает пороговое устройство 15, и замыкаются конта.сты элементов включения 11 ограничителей 8 всех следящих приводов 1-3„
Если управляющие сигналы V превышают уровни ограничения сигналы мна входа;с гидроприводов 5 ограничиваются. Разрешенные величины сигналов V в режиме ограничения достаточно малы, по&тому золотники движутся к не11тральному пеложенпюг а расхогдЫц потребляемые каждым из гидроприводов 5s уменьшаются,, УменылаетсЯг cлeдojзaтeльнo. и суммарный расход.
Как только Q станет меньше О щкон-
такты элементов включения размыкаются, к ограничители:8 работают в режиме усн.леция, не вызывая ограничения сигналов V. Если затем рост суммарного расхода вызовет превышение разрешенного сигнала , вновь происходит ограничение входных сЕГ- галов гидроприводов S,
Таким образтэм, на входах гидропршзодов 5 нг,5люцаются колебания входныхсигналов V 3 средние составляюш.ие которых соответствуют допустимой величине суммарного расхода. Колебания гфекратятся, когда в .результате обработки рассогласований 2 следящие приводы бупут иметь сигналы V
не вызывающие превышения разрешенного уровня суммарного расхода, заданного сиг нaлoмQ. датчика эталонного сигнала 16. В этом случае контакты элементов включения постоянно разомкнуты, и приводы рабо тают обычным образом. При другом числе приводов принцип действия устройства не
меняется.
Система управления электрогидраилическим манипулятором при работе от гидравлической станции питания ограниченной мощности позволяет исключить перегрузки источника питания и функциональные отказы системы, что повысит ее надежность, расширит область применения и увеличит ее ресурс работы. Кроме того повышается эффективность использования энергетических возможностей источника питания, так как он более длительное время работает на максимальных расходах, потребляемых системой приводов. Повышается производительность труда оператора, так как все приводы непрерывно выполняют задачи слежения и обеспечивают более согласованное движение исполнительного органа манипулятора.
Формула
зобретения
Система управления электрогидравлнчес- КИМ манипулятором, содержащая по каждой регулируемой координате последовательно соединенные сумматор и усилитель и гидропривод, выход которого через датчик обратной связи соединен с одним из входов сумматора, о т л и ч а ю, щ а я с я . тем что, с целью расширения области применени и повышения надежности системы, она содержит ограничитель управляющего сигнала по каждой регулируемой координате, датчик эталонного сигнала и последовательно соединенные датчик суммарного расхода рабочей жидкости, второй сумматор, и пороговое
устройство, выход которого подключен к первому входу ограничителей управляющего сигнала, второй вход которых соединен с Выходом усилителей, а выход со бходом гидроприводов, выход датчика эталонного сигнала подключен ко второму входу второго сумматора.
Источники информации, принятые во внимание при экспертизе:
1,Авторское свидетельство СССР № 298299, кл. А OlQ 3/О8, 04,12.
2.Авторское свидетельство СССР
№ 446256, кл. А 01 G 23/08,05.03.73,
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электрогидравлическим манипулятором | 1977 |
|
SU714348A1 |
| Система управления электрогидравлическими манипуляторами | 1977 |
|
SU750425A1 |
| Система управления электрогидравлическим манипулятором | 1976 |
|
SU640841A1 |
| Система управления копирующим манипулятором | 1976 |
|
SU574320A1 |
| Способ регулирования силовых электрогидравлических следящих приводов и устройство для его осуществления | 1975 |
|
SU705418A1 |
| Система управления электрогидравлическим приводом | 1976 |
|
SU643831A1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| Устройство для оценки профессиональной пригодности оператора ручной системы управления | 1982 |
|
SU1061171A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
LJ
r
