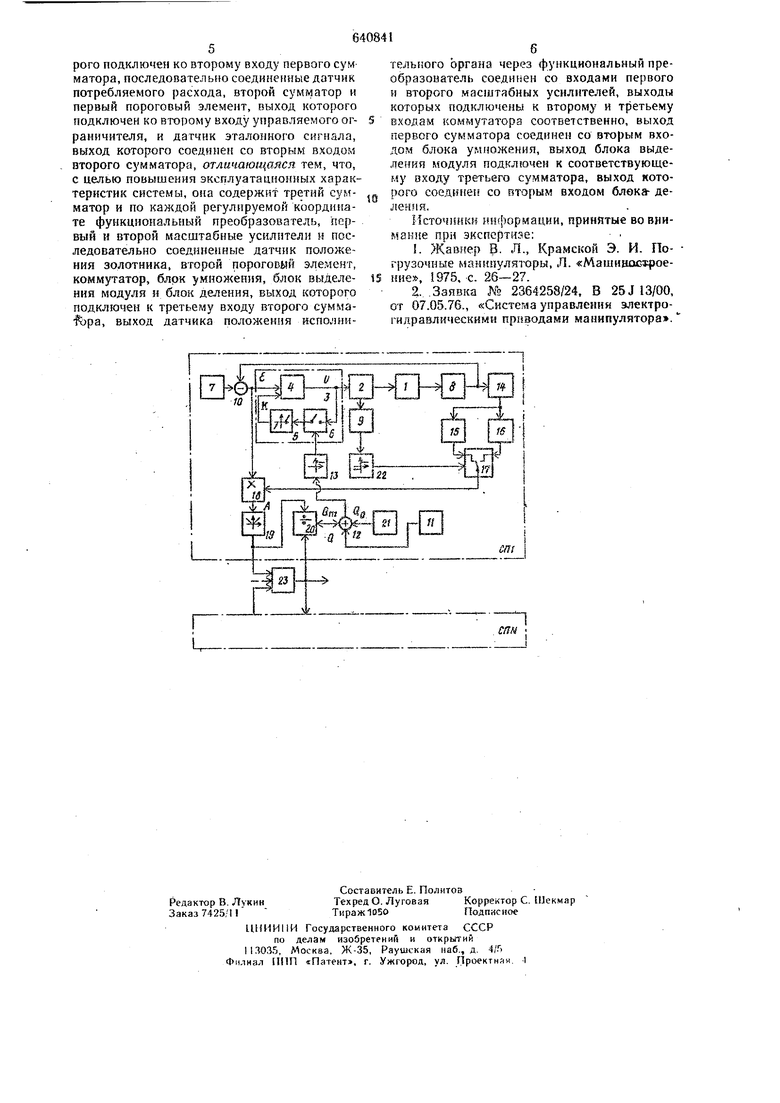
рой масштабные усн; ители н последовательно соединенные датчик гголоженин золотника, агорой nopoj-овый элемент, коммутатор, блок умножения, блок выделения модуля и блок делеиня, выход которого подкльзчен к третьему входу сук матора, выход датчика положенкя нсполкительного органа через функциональный преобразователь соединен со входа н первого у, второго масштабных, уенл ггелей, выходы которых подкл Оче5-вы к второму н третьему входам коммутатора соответетБенно, выход первого сумиатора соединен со Г5торым входом блока умножения, выход блока выделения модуля йодклю гея к еоответстйуюш.ему входу, третьего сумматора, выход которого соединён соBTOpfcSM входом блока деления. На чертеже «оказана блок-схеыа системы, на которой указа и hi: 1 - гидродвигатеоТь; 2 - золотк 4Г овый- гйдрораспределитель; 3,- управляемый ограничитель; 4 - ус1 литель; 5 - нел.инейн.;.1Й элемент тпа «Зона «ечувствительностн ; 6 - ключ;- 7 -- датчик положенгш задающего органа, 8 - датчик положення исйолнительного органа, 9 - датчик положений золотника; 50 - первый сумматор; i I - датчик потребляемого расхода; 12 - второй сумй/ атор; 1.3 первый порогоЕый элемент; 14 - функциональный преобразователь; 15 к i6 - масштабные усилители; 17 - коммутатор; 18 - блок умножения; 19 - блок вьщеленйя модуля-; 20 - блок деления; 21 датчик эталонного сигнала; 22 - второй пороговый .элемент; 23 - третий сумматор. Блоки системы образуют N следящих приводов Cni,.,.CrfN, каждый из которых огравичеи пунктирной линкей. Кроме того, на чертеже обозначено: К - Сигнал переключения; U - входной сигнал золотвйкового гндрораспреДелителя 2; S° - Сигнал ошибки; Q - сигнал датчика потребляемого расхода 1 i; Q-mirQo - сигналы допустимых уровней потребляемого расхода; А -.выходной сигнал блока умножения 18. /« Система управления манипулятором работает следующим образом. Если сигнал Q датчика потребляемого расхода 11 превысит .сумму сигналов QaH Qg на выходах блока деления 20 н датчика эталонного сигнала 21. то первый пороговый элемент 13 выдаст сигнал К переключения 1июча 6. Эювызовет ограничение входного сигнала U золотникового гидрораспределителя 2 с электрогндравлическим управлением и уменьшение расхода, потребляемого следящим приводом от источника энергии. Как только сигнал Q станет, меньше Qsn+Qe, восстанавливается прежняя величина сигнала U. Функциональный преобразователь 14 воепроизводит зависимость плеча действия силы R, развиваемой гидродвигателем 1 (относительно соответствующего шарнира исполнительного органа манипулятора) от сигнала на вы.чоде датчика положения исполнительного органа 8. Значения коэффициентов пе}5едачи касштабпык усилителей 15 .и 16 пропорциональны характерным размерам гидродвигателя 1, например, эффективным площадя 4 поршня гидроцилиидра F .. нР„ в случае гидродвнгателя I поступательного действия. При смещении золотника в одну сторону относительно его нейтрального положения б.лагодаря срабатыванию второго порогового элемента 22 от сигнала датчика положения золотийка 9, к выходу коймутатора подсоедкияется один из масштабных усилителей, ггапример 15,.а при смещении, золотника в другую сторону - другой масштабный усилитель - 16. Выходной сигнал А блока умножения 18 пропорционален произведению сигнала ошибки 2 (плеча действия силы гидродвигателя I R) н характерного размера гидродзигателя f Рд или FJJ (в зависимости от направления смещения -золотника золотникового гидрораспределителн 2 относительно нейтрального положения). На выходе блока деления 20 образуется сигнал Q,.. прямо пропорциональный модулю сигнала А данного привода и обратно пропорциональный сигналу на выходе третьего сумматора 23, равному сумме модулей сигналов А всех приводов системы. Сигнал Q,n .является сигналом, пропорциональным одной составляющей допусТ.ЙМОГО уровня потребляемого расхода, потребляемого данным приводом, и ог ределяет скорость, развиваемую соответствующим звеном исполнительного органа манипулятора. Вторая составляющая допустимого уровня потребляемого расхода задана сигналом QJ, датчика эталонного сигнала 21. и обеспечивает компенсацию потерь энергии в приводе, обусловленных его негерметкчностыо. применение изобретения позволит по сравнению с прототипом повысить ориентировочно в 1,2 раза производительность труда и существенно снизить утомляемость оператора при использовании источников энергии существенно ограниченной мощности благодаря достижению нового технического эффекта: обеспечению высокой степени соответствия движения охвата манипулятора заданному движению. Формула изобретения Система управления электрогидравлическим манипулятором, содержащая по каждой регулируемой координате последовате; ьно соединенные датчик положения задающего органа, первый сумматор, управляемый ограничитель, золотниковый гидрораспределитель, гидродвигатель и датчик положения исполнительного органа, выход которого подключен ко второму входу первого сумматора, последовательно coeAHHeFiHbie датчик потребляемого расхода, второй сумматор и первый пороговый элемент, выход которого подключен ко второму входу управляемого ограничителя, и датчик эталонного сигнала, выход которого соединен со вторым входом аторого сумматора, отличающаяся тем, что, с целью повышения эксплуатационных характеристик системы, она содержит третий сумматор и по каждой регулируемой координате функциональный преобразователь, первый и второй масштабные усилители н последовательно соединенные датчик положения золотника, второй пороговый элемент, коммутатор, блок умножения, блок выделения модуля и блок делення, выход которого подключен к третьему входу второго суммаfupa, выход датчика положення исполиительного органа через функциональный преобразователь соединен со входами первого и второго масштабных усилителей, выходы которых подключены к второму и третьему входам коммутатора соответственно, выход первого сумматора соединен со вторым входом блока умножения, выход блока выделения модуля подключен к соответствующему входу третьего сумматора, выход которого соединен со вторым входом блока- деления.
Источники информации, принятые во внимание при экспертизе:
1.Жавнер р. Л., Крамской Э. И. Погрузочные манипуляторы, Л. «Машиностроение, 1975. с. 2Q-27.
2..Заявка М 2364258/24, В 25Л3/00, от 07.05.76., «Система управления электрогидравлическимн приводами манипулятора.
п
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электрогидравлическим манипулятором | 1977 |
|
SU714348A1 |
| Система управления электрогидравлическими манипуляторами | 1977 |
|
SU750425A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Электрогидравлический следящий привод | 1980 |
|
SU928093A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Электрогидравлический следящий привод | 1981 |
|
SU1028903A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ САМОЛЕТА | 1988 |
|
RU2041136C1 |
| Устройство для определения скольжения асинхронного двигателя | 1986 |
|
SU1415399A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
