1
Изобретение относится к области сштоматики, а именно к системам автоматического регулирования химикотехнологическими процессами с помо- j щью регуляторов с переменной структурой .
Известен регулятор, структура которого во время переходного процесса скачком изменяеся с целью улучшения Q качества и повышения динамической точности системы l .
Известный регулятор не обладает высокой надежностью, так как дифференциатор, применяющийся в нем, вы- 15 дает сигнал недостаточной величины при медленном изменении регулируемой величины. При этом система эвтомати- ческого регулирования оказывается нечувствительной к увеличению сигна- 20 ла ошибки.
В этом регуляторе переключение структуры система осуществляется в зависимости от знака суммл производной модуля сигнала ошибки cHCTeNtu и 25 модуля сшибки система, взятого с некоторым коэффициентом.
Из известных устройств для формирования управляющего воздействия, осуществляющего переключение структу-30
ры система .автоматического регулирования, наиболее близким по технической сущности является устройство, содержащее последовательно соединенные выпрямитель сигнала сшибки, первый дифференциатор, первый сумматср и релейный усилитель, выход выпрямителя через первый масштабируюи ий блок соединен со вторым входом первого сумматора, через последовательно соединенные второй дифференциатор и второй сумматор - со вторым входом первого дифференциатора, . через второй масштабирующий блок со вторым входом второго сумматора, а через пороговый блсэк - со вторым в1{одом второго дифференциатора и третьим входом первого дифференциатора 2.
Недостатком известного устройства являются недостаточная точность, надежность устройства. Кроме того, для формирования пропорционёшьно-интегрально-дифференциёшьного алгоритма регулирования необходимо в регуляторе иметь еще один дифференциатор сигнала ошибки сиCTevbi, который; выдает дифференциальную состгшляющую регулирующего воздействия с большой динамической ошибкой.
Цель изобретения - повышения точности, надежности и расширение функ.циональных возможностей устройства.
Это достигается тем, что в известное устройство для формирования управлянлцего воздействия дополнительно введены третий дифференциатор, последовательно соединенные третий масштабирующий блок, третий сумматор и элемент И и последовательно соединенные усилитель и переключатель, второй вход которого соединен с первым входом первого сумматора и через элемент И - с четвертым входом первого дифференциатора, пятый вход которого соединен с выходом третьего сумматора, а первый - со входом третьего масштабирующего блока и через третий дифференциатор - со вторым входом третьего сумматора, вход выпрямителя соединен со входом усилителя , а вход третьего дифференциатора - с выходом порогового блока.
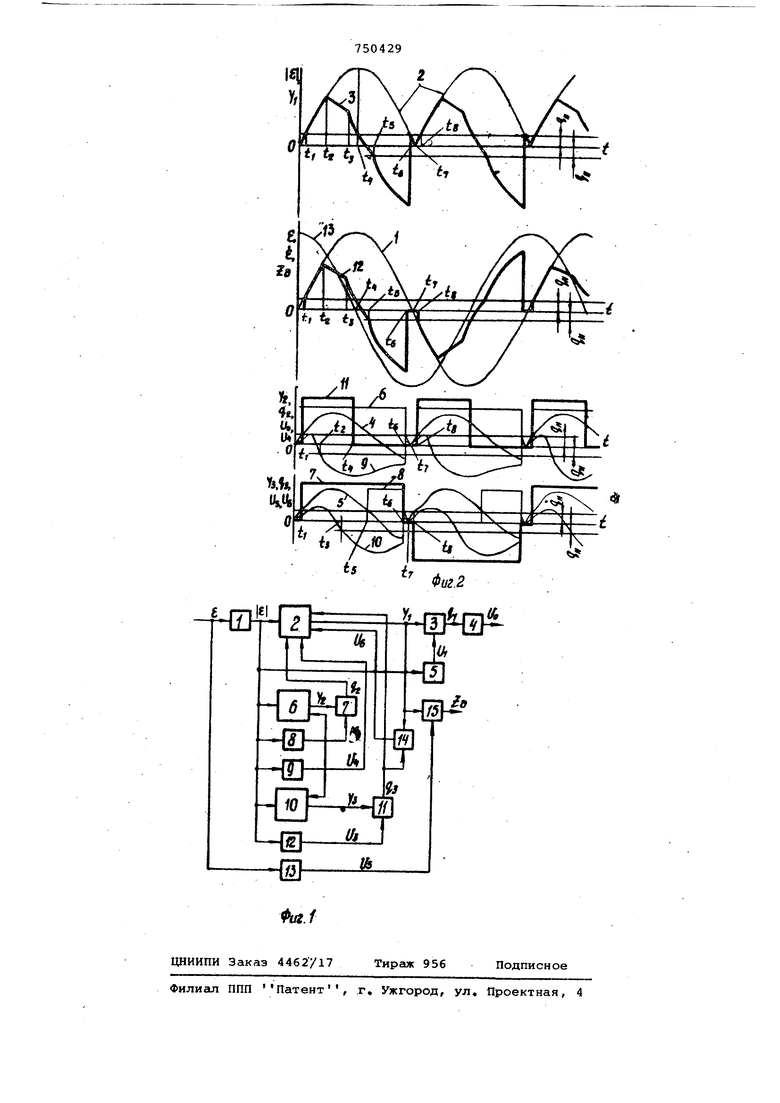
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - графики, иллюстрирующие его работу.
Устройство состоит из выпрямителя 1 сигнала ошибки, первого дифференциатора 2, первого сумматора 3, релейного усилителя 4, первого масштабирующего блока 5, второго дифференциатора б, второго сумматора 7, второго масштабирующего блока 8, порогового блока 9, третьего дифференциатора 10, третьего сумматора 11, третьего масштабирующего блока 12, усилителя 13, элемента 14 И, переключателя 15.
На фиг. 2 по оси обсцисс отлажено время, а по оси ординат:С - сигнал ошибки система (кривая 1) - мо- дуль сигнала сшибки (кривая 2); Y, 2 5 выходные сигналы первого, второго и третьего дифференциаторов соответственно (кривые 3, 4, 5); U4 - выходной сигнал порогового блока (кривая б); Us - выходной сигнал усилителя 13 (кривая 7); U - выходной сигнал элемента 14 И (кривая 8); qj, q - выходные сигналы второго и третьего сумматоров (кривые 9 и 10); UQ - выходной сигнал релейного усилителя 4 (кривая 11); Zg - дифференциальная составляющая регулирующего воздействия (кривая 12); С - идеальная производная сигнала сшибки (кривая 13) .
Устройство работает следующим образом.
На сумматорах 3, 7, 11 реализуются следующие функции переключения
qj 5з
qt + YI; Я2 +
qa Knsiel + 3
где , Кд2 , Кдз - коэффициенты усиления масштабирующих блоков 5, 8 и 12,
Дифференциаторы 2, б и 10 формируют сигналы Yj , Yg , Y в соответстВИИ с уравнениями
YI T,i(f|-, Тл1 Yi +
+ Y, Тд,
ла -fs
T.Yj+Ya
где , Тд1 , Тдг , Тда - постоянные времени дифференциаторов, которые сигналом порогового блока 9 переключаются в соответствии с алгоритмом
Тдг, 00 при , (1)
Тд
Тл1 Тдг 2; Тдз Тз при|е1 „-, 2) Т Т
где порог срабатывания порон
гового блока;
Тд - конечные значения посто гянных времени второго и третьего дифференциаторов , При1С1 ц параметр первого дифференциатора Т переключается сигнаЛ1
И YJ В соответствии с аллами qj/ q горитмом
TM-OO
,с з -Чн1(3) ,
.Яз -Ян- 1
U
п Л1 Т,2
,(5)
А1 .
Р Ч2 -Ч«Чэ-% 1 -Чи
0 где Т
- конечные значения
42
13
И постоянной времени первого дифференциатора ,
Выходные сигналы устройства UQ и Zg формируются под действием сигналов q и в соответствии с алгоритмом
(7) (8) (9-) (10) (11)
Такое переключение структуры дифференциаторов позволяет удовлетворить требованиям, предъявляемым к устройству, что иллюстрируется графиками, показанными на фиг. 2 в частном случае, когда Кд OHqtsYi. При нарастании сшибки система параметры всех дифференциаторов, согласно (1), бесконечно большие величины, поэтому Y Yj Yj б1 , что обеспечивает нешвысшую чувствительность блоков усзтройства. В момент времени ti сигнал достигает порогового значения q, при этом срабатывает релейный усилитель 4 и пороговый блок 9, их выходные сигналы UQ (согласно (7)) и ид принимают постоянные значения (кривые 11 и 5 соответственно). Сигнал ид4 согласно (2), вызывает пе1 ёключение второго и третьего дифференциаторов на конечные постоянные времени Tj и Tg,
В момент времени t условие (3) сменяется условием (4) и параметр
дифференцирования TJjj переключается на значение , а в момент времени tj функция переключения удовлетворяет условию (5) и. параметр дифференцирования Тп| переключается на значение Т|2 (Т,, TU ), что обеспечивает более точное дифференцирование сигнала | С| , В момент вермени Ь выполняется условие (8) и сигнал U,, обраща:ется в нуль, что точно совпадает с моментом 14. инвертирования знака
идеальной -производной (кривая 13),
В момент времени tg выполняется условие (6), элемент 14 И выдает сигнал Uf, , который переключает параметр дифференцирования „ на конечное
значение Т ц, (Tta Т), что обеспечивает более точное дифференцирование сигнала модуля ошибкиjsl в интервале времени tj tC t. В момент времени t пороговый блок 9 реагирует на уменьшение сигнала|е1 ниже порога срабатывания, при этом U О и, согласно (1) , параметры всех дифференциаторов снова принимают бесконечно большие значения, они подготавливаются к новому циклу дифференцирования, который начинается в момент времени t при новом увеличении сигнала l.
Сигнал дифференциальной составляющей регулирующего воздействия Zg форг-отруется следующим образом. В интервале времени tji ti t он совпадает с сигналом Yj согласно- (9), а в интервале времени равен нулю согласно (11)- В момент времени tg усилитель 13 вьщает сигнал Uj , под влиянием которого переключатель 15 инвертирует знак сигнала У на выходе согласно (10). Таким образом сигнал Zg воспроизводит сигнал идеальной производной ё более точно, чем это выполняет пассивный дифференциатор.
Использование изобретения позволяет получить экономический эффект в размере 500 руб. в год.
Формула изобретения
Устройство для формирования управляющего воздействия, содержащее последовательно соединенные выпрямитель первый дифференциатор, первый сумматор и релейный усилитель, выход выпрямителя через первый масштабирующий блок соединен со вторым входом первого сумматора, через последовательно соединенные второй дифференциатор и второй сумматор - со вторым входом первого дифференциатора, через второй масштабирующий блок - со вторым входом второго сумматора, а через пороговый блок - со вторым входом второго дифференциатора и третьим входом первого дифференциатора, отличающееся тем,что,с целью повышения точности/надежности и расширения функциональных возможностей ,устройств а, оно содержит третий дифференциатор ,последовательно соединенные третий масштабирующий блок, третий сумматор и элемент И и последовательно соединенные усилитель и переключатель, второй вход которого соединен с первым входом первого сумматора и через элемент И - с четвертым входом первого дифференциатора, пятый вход кторого соединен с выходом третьего сумматора, а первый со входом третьего масштабирующего блока и через третий дифференциаторсо вторым входом третьего сумматора, вход выпрямителя соединен со входом усилителя,а второй вход третьего дифференциатора - с выходом порогового блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 429413, кл. G 05 В 11/14, 1974.
2,Авторское свидетельство СССР 580546, кл. G 05 В 13/02, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования сигнала переключения структуры систем автоматического регулирования | 1976 |
|
SU580546A1 |
| Следящая система | 1977 |
|
SU642676A1 |
| Импульсный регулятор | 1988 |
|
SU1594485A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| Система автоматического регулирования | 1981 |
|
SU1029135A1 |
| Устройство для управления инерционнымОб'ЕКТОМ | 1979 |
|
SU802924A2 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120654C1 |