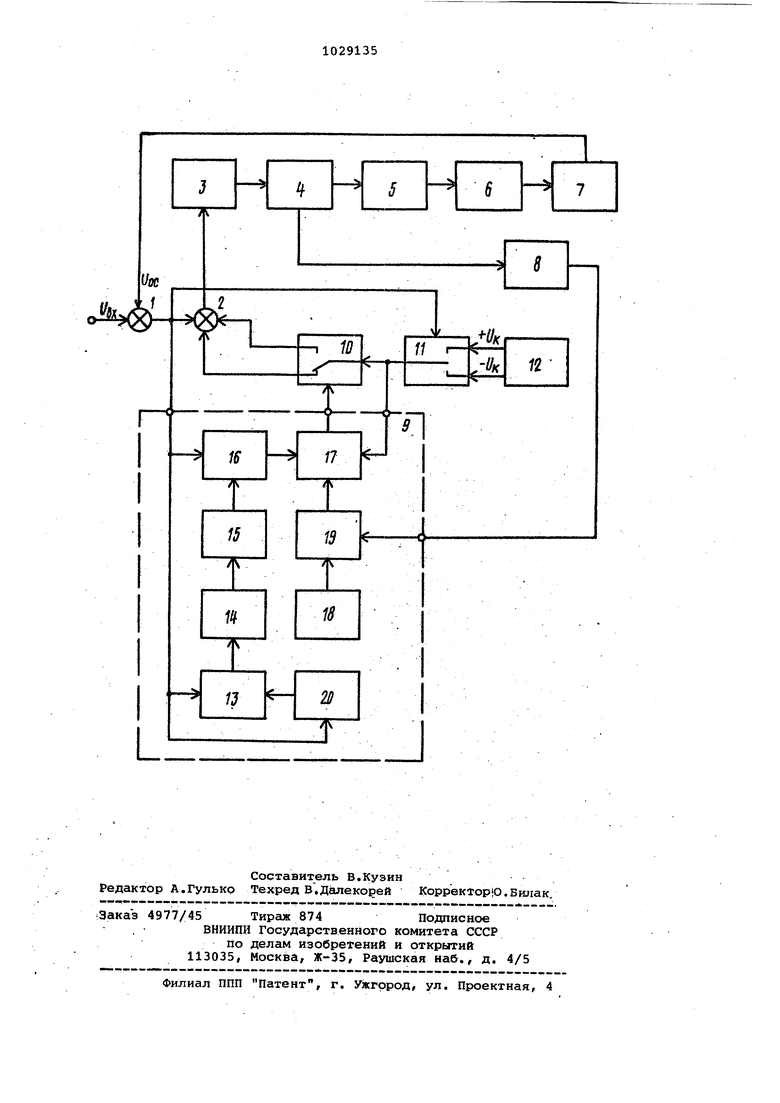
Изобретение относится к автома-г тическому регулированию и может быть использовано, в частности, при построении нелинейных корректирующих устройств в следящих системах. Известны системы автоматического управления, в которых имеется только один контур управления, состоящий из последовательно соединенных сравнивающего устройства, усилителяпреобразователя, имеющего релейную характеристику, и исполнительного органа, выход которого подключен к объекту, выход котордго подключен к входу сравнивающего устройства, на второй вход которого подается задаю щее воздействие 1. Такие системы отличаются своей простотой, но не могут обеспечить требуемых характеристик переходных процессов при обработке ступенчатых задающих воздействий (максимально Врзможное быстродействие, отсутстви перерегулированияJ. . Известны системы оптимального по. быстродействию регулирования, в которых в цепи обратной связи включено специальное вычислительное уст ройство, синтезирующее линию переключения знака управляющего .релейного сигнала 2 3. Недостатком таких систем являетс сложность надстройки вычислительного устройства, кроме того, переходный процесс становится неоптимальным, пр изменении модуля управляющего сигна ла или инерционности объекта. Наиболее близкой по технической сущности к предлагаемой является си тема автоматического регулирования, содержащая два контура управления. В первый контур включены последовательно соединенные первый и второй сумматоры, усилитель, двигатель, редуктор, исполнительный механизм и датчик обратной связи, выход кото рого подключен к первому входу первого румматора, на второй вход кото рого подается задающий входной сигнал. Второй контур включен между вы ходом двигателя и вторьам входом вто рого сумматора и содержит последовательно соединенные датчик скорост и ключ, второй вход которого через преобразующее устройство подключен к выходу первого сумматора. Второй контур системы позволяет ввести кор ректирующий сигнал, пропорциональный производной от сигнала ошибки с момента равенства модулей сигна. лов ошибки и ее производной до момента равенства текущего значения производной-ошибки пороговому значению. Такая коррекция практически ликвидирует перерегулирование 3 . Однако данная система не обеспечивает предельного быстродействия при обработке ступенчатого входного сигнала, так как полная эффективность исполнительно органа используется не на всем интервале переходного процесса. Целью изобретения является повышение быстродействия. Поставленная цель достигается тем, что система автоматического регулирования, содержащая датчик скорости, дифференциатор, последовательно соединенные первый сумматор, второй сумматор, подключенный вторым входом к первому выходу первого ключа, усилитель, двигатель, редуктор, исполнительный механизм и датчик обратной связи, выход которого соединё.н с входом первого сумматора, выход двигателя подключен к входу датчика скорости, дополнительно содержит последовательно соединенные источник корректирующего сигнала, второй ключ, подключенный выходом к входу первого ключа, а вторым входом - к выходу первого сумматора, последовательно соединенные третий ключ, запоминающий элемент, масштабный блок, первый компаратор, подключенный вторым входом к выходу первогО сумматора, к первому входу и через дифференциатор - k второму вхоjay третьего ключа, логический блок, второй вход и выход которого подключены соответственно к входу и управляющему входу первого ключа, подсоединенного вторым выходом к третьему входу второго сумматора, последовательно соединенные задатчик, второй компаратор, второй вход и выход которого подключены соответственно к выходу датчика скорости и к третьему входу логического блока. На чертеже представлена функциональная системы автоматического: регулирования. Система автоматического регулирования содержит первый сумматор 1, второй-сумматор 2, усилитель 3, двигатель 4, редуктор 5, исполнительный механизм 6, датчик 7 обратной связи, датчик 8 скорости, преобразующее устройство 9, первый ключ 10, второй ключ 11, источник 12 корректирующего сигнала, третий ключ 13, запоминающий элемент 14, масштабный блок 15, первый компаратор 16, логический блок 17, задатчик 18, второй компаратор 19 и дифференциатор 20. Последовательно соединенные первый сумматор 1, второй сумматор 2, усилитель 3, двигатель 4, редуктор 5, исполнительный механизм 6 и датчик 7 обратной связи, выход которого подключен к второму входу первого cy Фlaтopa 1, образуют линейный контур регулирования. Корректирующий сигнал ±и с выходов источника 12 корректирующего сигнала через второй
югюч 11 и первый KJiro4 10 подается на второй или третий вход втертого сулматора 2, Первый ключ 10 представляет собой дистанционный переключатель с двумя устойчивыми положениями, его положение определяется сигналами, 5 подаваемыми на его первый вход с выхода преобразующего устройства 9, на первый, второй и третий вход которогопрдс1ются сигналы соответственно с выхода первого cyvsMaiopa 1, вы- 10 хода второго ключа 11 и выхода датчика 8 скорости. Второй ключ 11 выполнен .в виде врляризованного реле со средйим устойчивым положением иупг равляется сигналом с выхода Первого ,15 суммйтора: 1, поступающим на его тре-; тий вход. Третий ключ 13 замыкается при отсутствии (смене знака }сигнала на его втором входе;, т.е. при. Е 0.
, Система работает, следующим об- 20 разом. V; ..-:-. . - .
В исходном положении первый ключ .0 наХодйтсА в первом положении, и с;оедИ)1яет свой вход с вторым ( миЕрующим ) входом второго сумматора 25 2, второй ключ 11 находится в ней тральнсм йопо5кенни. ПОлсзжение ключей 10 и 11 соответствуе т их исходному состоянию. При отработке медленно Меняющиеся входных сигналов, когда ,. амплитуда Оиюбки не превышает за данного порогового значения, устройство рабротсает как линейная система. Ври 1Юявл.ении ступеньки сигнала ошибки, превышающей пороговое аначенйе, срабатывает второй ключ 11 л и сигнал коррек:цйии„ со знаком, Ъоотввтствующим .знаку ошибки, подается. с выхода источника- 12 корректирую- . щего сигнала через второй ключ 11 и первый клкгчЮ на второй (суммирую-- 4D щий )вход второго сулфцатора 2, что соответствует введению глубокой йоложительной обратной связи. Усилитель 3 переводится в насшцение, и двигатель 4 начинает форсированный раз- 45 гон в сторону ликвидации ошибки Одновременно сигнал коррекции С выхода второго ключа 11:подаемся на вто- . рОй вход; преобразующего устройства 9, в котором логический бЛок 17 при- со водится в готовностЬ к работе., в , момент окончания нарастания Сигнала ошибки 6 его производная 0. Отсутствие сигнала на выходе дйфференUHiaTOpa 20 кратковременно открывает третий ключ 13, через который теку- - щее значение сигнала ошибки подается
на вход запоминающего элемента 14i который запоминает это значение. Запомненная величина ошибки подается через масштабный блок 15, в котором они умножается на определенный коэф фициент К на первый вход первого Компаратора.16, в котором она срав-; нивается с текущим значенйем сигнал ошибки, подаваеншм на второй вход первого компаратора 16. В момент равенства этих сигналов с-выхода первого компаратора 16 управляющий сигнал через логический б1пок 17 поступает на вход первого ключа 10, который переключает свОй вход на третий (вы1читающий ) вход второго сукилатора 2, сигнал на выходе которого меняет знак и по амплитуде достаточен для перевода усилителя 3 в . режим насыщения. Двигатель 4 начинае: форсированное торможение. Отключение корректирующего сигнала происходит при снижении модуля сигнала ошибки допорогового значения. При этом второй ключ 11 устанавливается в исходное положение, сигнал на его выходе пропадает, и логический блок 17 переводит первый ключ 10 в исходное положение. В реальной системе может случиться так, что под действием.возмущений, скорость двигателя 4 уменьшается до своего порогового значения раньше, чем ликвидирована сшибка. В этом случае сигнал на выходе датчика 8 скорости равен сигналу навыходе .загдатчика 18 и сигнал с выхода компаратора 19 через логический блок 17 поступает на вход первого ключа 10., который переключается в исходное положение. При этОм система форсированно ликвидирует ошибку. .
Коэ.ффйциент К в идеальнсад сл.учае равен 0,5. Однако при постройке реальной системы он может, быть выбран в пределах 0,4-0,6.: Причём его величина остается постоянной, независимо от амплитуды,входного сигнала и от изменения инерционности объекта, так как участки форсированного разгона и торможения изменяются пропорционально.
Таким образом, введенные новые элементы и,связи позволяют использовать управляющее воздействие с полной эффективностью, и за счет
этого повысить быстродействие сие- темы. .. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод наведения | 2024 |
|
RU2835457C1 |
| Система управления | 1978 |
|
SU697974A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| Следящая система | 1983 |
|
SU1105858A1 |
| Бесконтактный двигатель постоянного тока | 1987 |
|
SU1684900A1 |
| Импульсный регулятор | 1988 |
|
SU1594485A1 |
СИСТЕМА АВТОМАТИЧЕСКОТТ РЕ-, |ГУЛИРЬВАНИЯ,содержащс1я датчик скорое тиг дифференциатор, последователь- : но соединенные первый сумматор,второй с5 Ф1атор, подключенный вторым входом к первому выходу первого клю ча, усилитель, двигатель, редуктор, исполнительный механизм и датчик обратной связи, выход которого соединен с входом первого сумматора, выход двигателя-подключен к входу , датчика скорости, отличающаяся тем, что, с целью повышения быстродействия, она содержит последовательно соединенные источник корректирующего сигнала, второй ключ, подключенный выходом к входу первого ключа, а вторым входом - к выходу первого сумматора, побледоватвльно соединенные третий ключ, запомингиощий элемент, масштабный блок, первый компаратор, подключенный вторым входс 4 к выходу первого сумматора, к первсжу входу и через дифференциатор - к второму входу третьего кл1бча, логический блок, второй вход и выход которого под(Л ключены соответственно к входу и управляющему входу первого ключа, подсоединенного вторым выходом к третьему входу второго сумматора, последовательно соединенные задатчик, с е второй компаратор, второй вхрд и выход которого подключены соЬтветственно к вьпсоду датчика и к третьему входу логического блока. ГО со со сд
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дмитриевский А.А., Лысен- ; ко Л.Н | |||
| Прикладные задачи теории оптимального управления движением беспилотных летательных аппаратов | |||
| М., Машиностроение, 1978, рис.4,li с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| ; : - - / | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Оптимальные и адаптивные система | |||
| М., Высшая школа, 1980, рис | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь-плита | 1920 |
|
SU184A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| -. | |||
