1
Изобретение относится к пневматическим системам автоматического регулирования и может быть использовано при автоматизации технологических процессов в химической, нефтеперерабаты- 5 вающей, металлургической и других отраслях прокышленности.
Известна пневматическая система автоматического регулирования, содержащая регулятор, задатчики автомати- 10 ческого и ручного управления, клапан и двухпозиционный переключатель режимов работы системы регулирования
It It
ручное ) 1 .
(автомат
Недостатком данной систе иы являет-15 ся то, что во многих случаях для сложных объектов, характеризуемых значительным запаздыванием, использование в качестве показателя хода технологического процесса лишь отклонения ре- 20 гулируемой величины и выполнение САР по одноконтурной схеме не позволяет получить удовлетворительное качество регулирования.
Наиболее близким техническим реше-25 нием к данному изобретению является пневматическая комбинированная система автоматического регулирования, содержащая регулятор, компенсатор, задатчики автоматического и ручного 30
2 1-.™;..:,
управления, клапан, сумматор, реле и первый и второй переключатели режимов, причем выход задатчика ручного управления соединен через клапан с выходом cиcтe tI, выход первого переключателя режимов соединен с управляющим входом клапана, а выход второго переключателя - с управляющим входом первого реле 2.
Недостатком данной системы является то, что она может быть применена лишь в тех случаях, когда допустимо использование алгоритма предварения; кроме того, в системе затруднен безударный перевод системы с режима ручного управления в режим коррекции, т.к. при 1зменёниях компенсирующего сигнала выходной сигнал сумматора не будет .равен выходному сигналу эадатчика ручного управления из-за дифференцирую цего действия компенсирующей связи.
Цель изобретения -,расширение функциональных возможностей системы, улучшение ее технических характеристик.
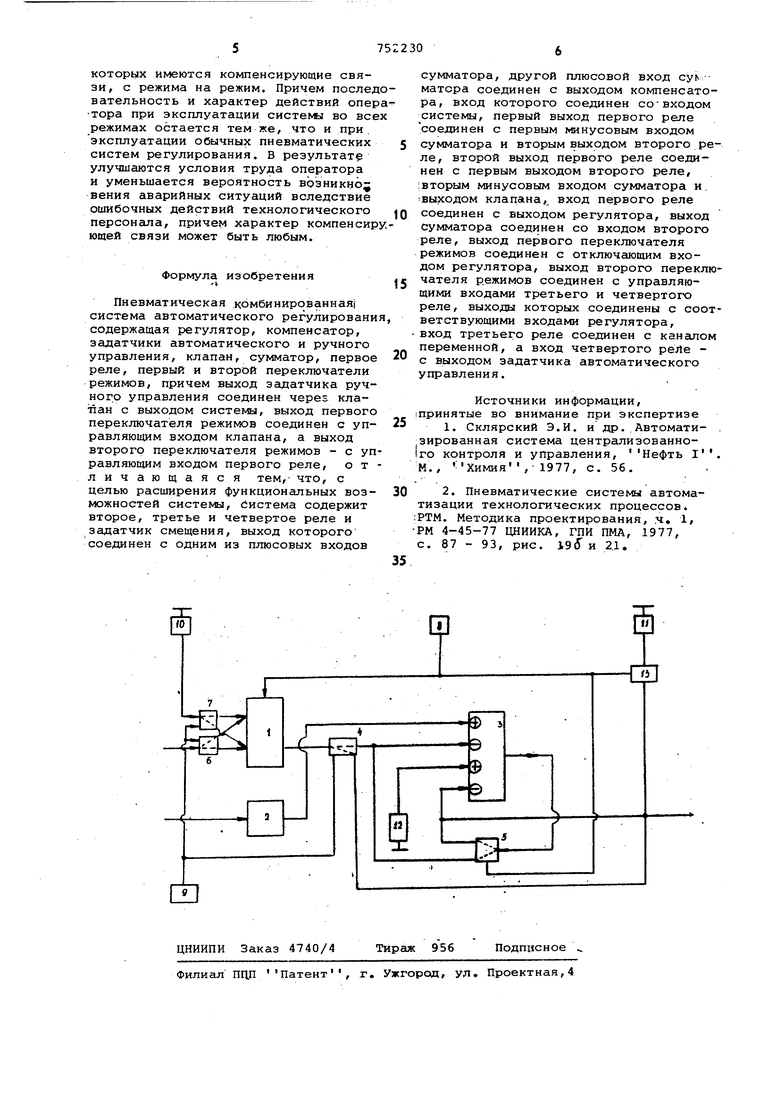
Поставленная цель достигается тем, чтб «йстема допрлнйРельно содержитвтоЬое, третье и четвертое реле и задатчик смещения, выход которого соедикен с одним из плюсовых входов сумматора, другой плюсовой вход сумматора соединен с выходом компенсатора, вход которого соединен со входом сйстеьш, первый выход первого реле соединен с первым минусовым входом сумматора и вторым выходом второго реле, второй выход первого реле соединен с первым выходом второго реле, вторым минусовым входом сумматора и выходом клапана, вход первого реле соединен с выходом регулятора , выход сумматора соединен со входом второго реле, выход первого переключателя режимов соединен с отключающим входом регулятора, выход второго переключателя режимов соединен с управляющими входами третьего и четвертого реле, выходы которых соединены с соответствующими входами регулятора, вход третьего реле соединен с каналом пере менной, а вход четвертого реле - с выходом задатчика автоматического уп равления. На чертеже представлена-структурная схема пневматической комбинирова ной системы автоматического регулиро вания. Система содержит регулятор 1, ком пенсатор 2, сумматор 3, первое 4, вт рое 5, третье 6 и четвертое 7 реле, первый 8 и второй 9 переключатели ре жимов, эадатчики автоматического 10 и ручного 11 управления, задатчик 12 смещения и клапан 13. Система работает еледукГщимобразом. При работе с компенсирующей связь первый переключатель 8 режимов устанавливается в положение автомат (выходной сигнал равен условному О), а второй переключатель 9 режимов - в положение коррекция (в ходной сигнал равен условной ). При этом канал переменной соединяетс через третье реле б с камерой задания, а выход задатчика 10 автоматического управления - через чет вертое реле7 с камерой переменной р гулятора 1, т.е. изменяется направле ние действия регулятора. Одновременн контакт первого реле 4 занимает верхнее положение и выходной сигнал регулятора 1 коммутируется к первому минусовому входу сумматора 3, аумми. руется с выходными сигналами компенсатора 2 и задатчика 12 смещения и поступает в линию исполнительного. механизма. При наличии возмущения, сигнал которого подается на вход ком пенсатора 2, исполнительный механизм за счет срабатывания компенсирующей связи приводится в действие еще до появления рассогласования между переменной и заданием, т.е. заблаговре менно, и тем самым повышается точность управления. При работе в режиме одноконтурной стабилизации переменной (без компенсирующей связи) второй переключатель 9 режимов переводится в положение одноконтурная стабилизация (выходной сигнал равен условному О). При этом канал переменной и выход задатчика 10 автоматического управления соединяются с соответствующими камерами регулятора 1; контакт первого реле 4 занимает нижнее положение и выход регулятора 1 коммутируется непосредственно в линию исполнительного механизма. Для-обеспечения безударности переключения системы с. любого из автоматических режимов (коррекция или одноконтурная стабилизация ) в режим ручного (дистанционного) управления производится выравнивание сигнала в линии исполнительного механизма и выходного сигнала задатчика 11 ручного управления путем вращения штока последнего, а затем переводят первый переключатель 8 режимов в положение ручное (выходной сигнал равен условной ), при этом происходит отключение регулятора 1 и открытие клапана 13; в результате выходной сигнал задатчика 11 ручного управления коммутируется i в линию вспомогательного механизма и в камеру изодрома регулятора 1 . Для обеспечения безударности переключения системы с ручного режима в режим одноконтурной стабилизации производится выравнивание сигнала переменной и выходного сигнала задатчика 10 автоматического управления путем вращения штока последнего, а затем переводят первый переключатель 8 в положение автомат. Для обеспечения безударности переключения системы в режим работы с компенсирующей связью в ручном режиме (выходной сигнал первого переключателя 8 равен условной ) обеспечивается коммутация вы ходного сигнала сумматора 3, равного -р - выходные .сигналы , компенсатора, задатчиков смещения и ручного управления, . к камере изодрома регулятора 1. В результате для безударного переключения достаточно, выравняв сигналы на входе регулятора 1, перевести первый переключатель 8 режимов в положение автомат, так как выходной сигнал сумматора 3 (Pgbix.) который поступает при этом через второе реле 5 в линию исполнительного механизма, оказывается равным выходному сигналу задатчика 11 ручного управления РК - (РК + PC - Рр) + Применение данной системы позволят ет автоматизировать процесс перевода пневматических систем управления, и
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическая система каскадного регулирования | 1973 |
|
SU450133A1 |
| Пневматическое устройство управления | 1980 |
|
SU881665A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ К/хСКАДНОГОУПРАВЛЕНИЯ | 1972 |
|
SU424113A1 |
| Пневматическая система регулирования | 1987 |
|
SU1492344A1 |
| Устройство для регулирования расхода материала | 1975 |
|
SU568041A1 |
| Пневматическое устройство для каскадного регулирования | 1976 |
|
SU610065A1 |
| Пневматическое регулирующее устройство | 1978 |
|
SU705420A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU1001006A1 |
| Устройство управления пневматическими регуляторами | 1980 |
|
SU881664A1 |
| Устройство для регулирования технологи-чЕСКиХ пАРАМЕТРОВ | 1979 |
|
SU842706A1 |
